 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSuper Agents and Confounders: Influence of surrounding agents on vehicle trajectory prediction
Apr 03, 2026In highly interactive driving scenes, trajectory prediction is conditioned on information from surrounding traffic participants such as cars and pedestrians. Our main contribution is a comprehensive analysis of state-of-the-art trajectory predictors, which reveals a surprising and critical flaw: many surrounding agents degrade prediction accuracy rather than improve it. Using Shapley-based attribution, we rigorously demonstrate that models learn unstable and non-causal decision-making schemes that vary significantly across training runs. Building on these insights, we propose to integrate a Conditional Information Bottleneck (CIB), which does not require additional supervision and is trained to effectively compress agent features as well as ignore those that are not beneficial for the prediction task. Comprehensive experiments using multiple datasets and model architectures demonstrate that this simple yet effective approach not only improves overall trajectory prediction performance in many cases but also increases robustness to different perturbations. Our results highlight the importance of selectively integrating contextual information, which can often contain spurious or misleading signals, in trajectory prediction. Moreover, we provide interpretable metrics for identifying non-robust behavior and present a promising avenue towards a solution.
KEEP: Integrating Medical Ontologies with Clinical Data for Robust Code Embeddings
Oct 06, 2025Machine learning in healthcare requires effective representation of structured medical codes, but current methods face a trade off: knowledge graph based approaches capture formal relationships but miss real world patterns, while data driven methods learn empirical associations but often overlook structured knowledge in medical terminologies. We present KEEP (Knowledge preserving and Empirically refined Embedding Process), an efficient framework that bridges this gap by combining knowledge graph embeddings with adaptive learning from clinical data. KEEP first generates embeddings from knowledge graphs, then employs regularized training on patient records to adaptively integrate empirical patterns while preserving ontological relationships. Importantly, KEEP produces final embeddings without task specific auxiliary or end to end training enabling KEEP to support multiple downstream applications and model architectures. Evaluations on structured EHR from UK Biobank and MIMIC IV demonstrate that KEEP outperforms both traditional and Language Model based approaches in capturing semantic relationships and predicting clinical outcomes. Moreover, KEEP's minimal computational requirements make it particularly suitable for resource constrained environments.
Physics-Informed DeepONets for drift-diffusion on metric graphs: simulation and parameter identification
May 07, 2025



We develop a novel physics informed deep learning approach for solving nonlinear drift-diffusion equations on metric graphs. These models represent an important model class with a large number of applications in areas ranging from transport in biological cells to the motion of human crowds. While traditional numerical schemes require a large amount of tailoring, especially in the case of model design or parameter identification problems, physics informed deep operator networks (DeepONet) have emerged as a versatile tool for the solution of partial differential equations with the particular advantage that they easily incorporate parameter identification questions. We here present an approach where we first learn three DeepONet models for representative inflow, inner and outflow edges, resp., and then subsequently couple these models for the solution of the drift-diffusion metric graph problem by relying on an edge-based domain decomposition approach. We illustrate that our framework is applicable for the accurate evaluation of graph-coupled physics models and is well suited for solving optimization or inverse problems on these coupled networks.
Low-rank computation of the posterior mean in Multi-Output Gaussian Processes
Apr 30, 2025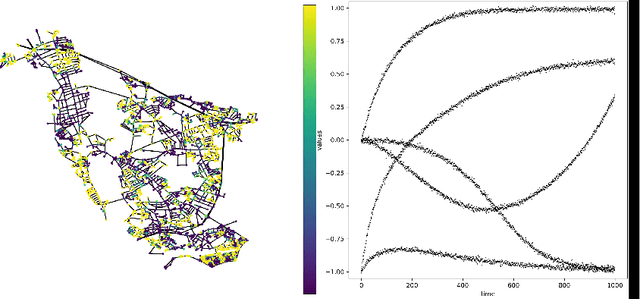
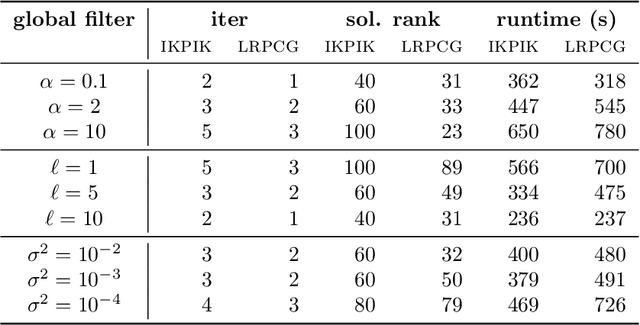
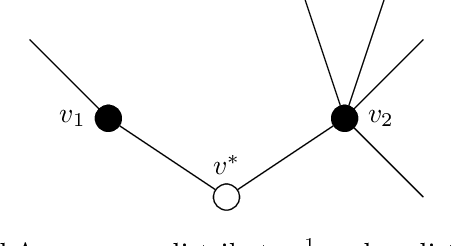
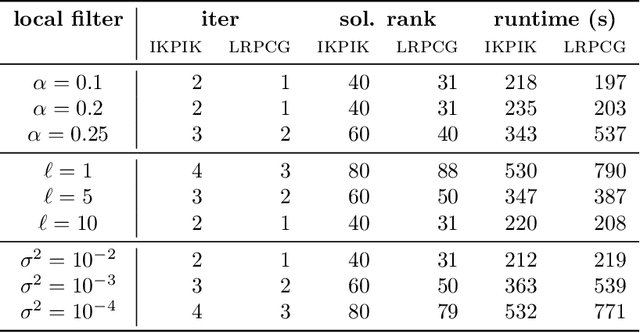
Gaussian processes (GP) are a versatile tool in machine learning and computational science. We here consider the case of multi-output Gaussian processes (MOGP) and present low-rank approaches for efficiently computing the posterior mean of a MOGP. Starting from low-rank spatio-temporal data we consider a structured covariance function, assuming separability across space and time. This separability, in turn, gives a decomposition of the covariance matrix into a Kronecker product of individual covariance matrices. Incorporating the typical noise term to the model then requires the solution of a large-scale Stein equation for computing the posterior mean. For this, we propose efficient low-rank methods based on a combination of a LRPCG method with the Sylvester equation solver KPIK adjusted for solving Stein equations. We test the developed method on real world street network graphs by using graph filters as covariance matrices. Moreover, we propose a degree-weighted average covariance matrix, which can be employed under specific assumptions to achieve more efficient convergence.
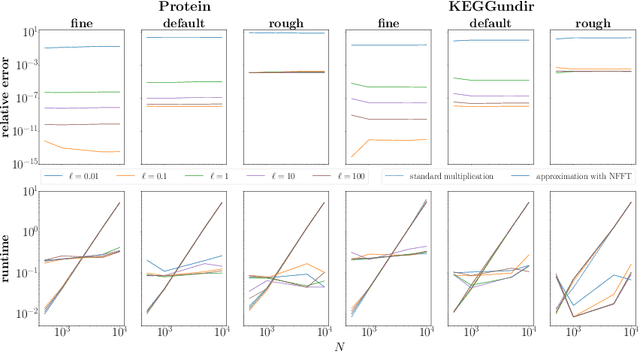
Preconditioned Additive Gaussian Processes with Fourier Acceleration
Apr 01, 2025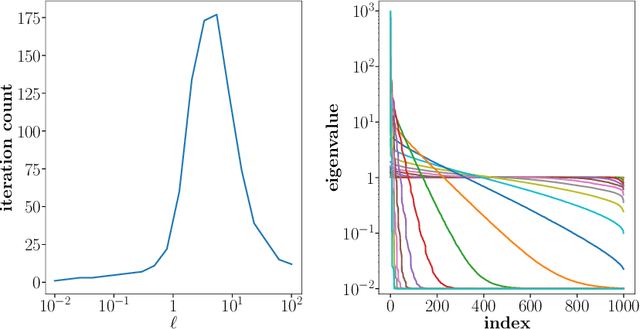



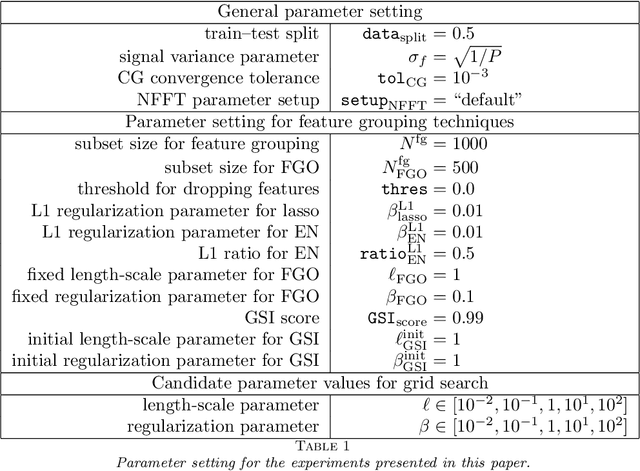
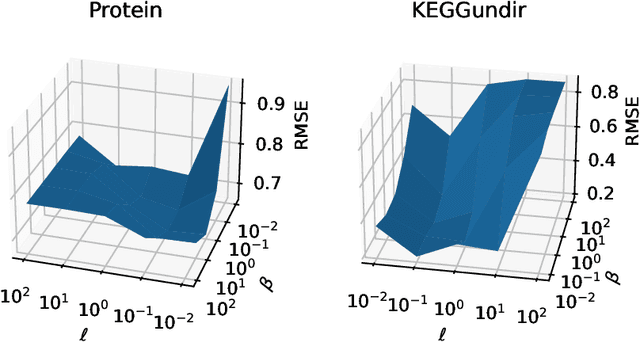
Gaussian processes (GPs) are crucial in machine learning for quantifying uncertainty in predictions. However, their associated covariance matrices, defined by kernel functions, are typically dense and large-scale, posing significant computational challenges. This paper introduces a matrix-free method that utilizes the Non-equispaced Fast Fourier Transform (NFFT) to achieve nearly linear complexity in the multiplication of kernel matrices and their derivatives with vectors for a predetermined accuracy level. To address high-dimensional problems, we propose an additive kernel approach. Each sub-kernel in this approach captures lower-order feature interactions, allowing for the efficient application of the NFFT method and potentially increasing accuracy across various real-world datasets. Additionally, we implement a preconditioning strategy that accelerates hyperparameter tuning, further improving the efficiency and effectiveness of GPs.
Fast Evaluation of Additive Kernels: Feature Arrangement, Fourier Methods, and Kernel Derivatives
Apr 26, 2024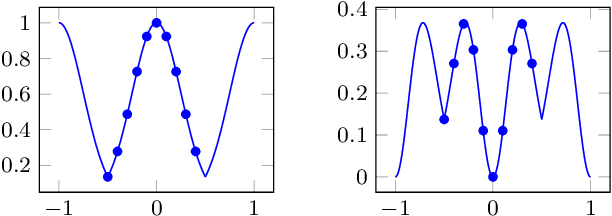
One of the main computational bottlenecks when working with kernel based learning is dealing with the large and typically dense kernel matrix. Techniques dealing with fast approximations of the matrix vector product for these kernel matrices typically deteriorate in their performance if the feature vectors reside in higher-dimensional feature spaces. We here present a technique based on the non-equispaced fast Fourier transform (NFFT) with rigorous error analysis. We show that this approach is also well suited to allow the approximation of the matrix that arises when the kernel is differentiated with respect to the kernel hyperparameters; a problem often found in the training phase of methods such as Gaussian processes. We also provide an error analysis for this case. We illustrate the performance of the additive kernel scheme with fast matrix vector products on a number of data sets. Our code is available at https://github.com/wagnertheresa/NFFTAddKer
Can Vehicle Motion Planning Generalize to Realistic Long-tail Scenarios?
Apr 11, 2024



Real-world autonomous driving systems must make safe decisions in the face of rare and diverse traffic scenarios. Current state-of-the-art planners are mostly evaluated on real-world datasets like nuScenes (open-loop) or nuPlan (closed-loop). In particular, nuPlan seems to be an expressive evaluation method since it is based on real-world data and closed-loop, yet it mostly covers basic driving scenarios. This makes it difficult to judge a planner's capabilities to generalize to rarely-seen situations. Therefore, we propose a novel closed-loop benchmark interPlan containing several edge cases and challenging driving scenarios. We assess existing state-of-the-art planners on our benchmark and show that neither rule-based nor learning-based planners can safely navigate the interPlan scenarios. A recently evolving direction is the usage of foundation models like large language models (LLM) to handle generalization. We evaluate an LLM-only planner and introduce a novel hybrid planner that combines an LLM-based behavior planner with a rule-based motion planner that achieves state-of-the-art performance on our benchmark.
A Preconditioned Interior Point Method for Support Vector Machines Using an ANOVA-Decomposition and NFFT-Based Matrix-Vector Products
Dec 01, 2023In this paper we consider the numerical solution to the soft-margin support vector machine optimization problem. This problem is typically solved using the SMO algorithm, given the high computational complexity of traditional optimization algorithms when dealing with large-scale kernel matrices. In this work, we propose employing an NFFT-accelerated matrix-vector product using an ANOVA decomposition for the feature space that is used within an interior point method for the overall optimization problem. As this method requires the solution of a linear system of saddle point form we suggest a preconditioning approach that is based on low-rank approximations of the kernel matrix together with a Krylov subspace solver. We compare the accuracy of the ANOVA-based kernel with the default LIBSVM implementation. We investigate the performance of the different preconditioners as well as the accuracy of the ANOVA kernel on several large-scale datasets.
Rethinking Integration of Prediction and Planning in Deep Learning-Based Automated Driving Systems: A Review
Aug 10, 2023
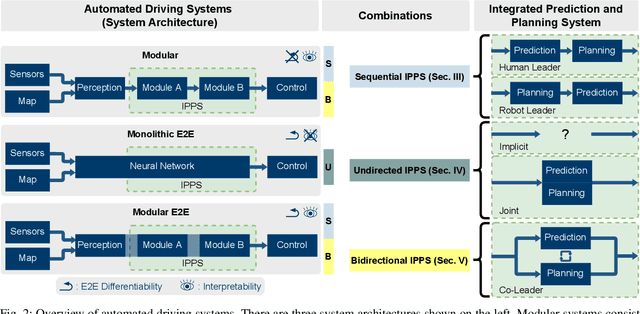
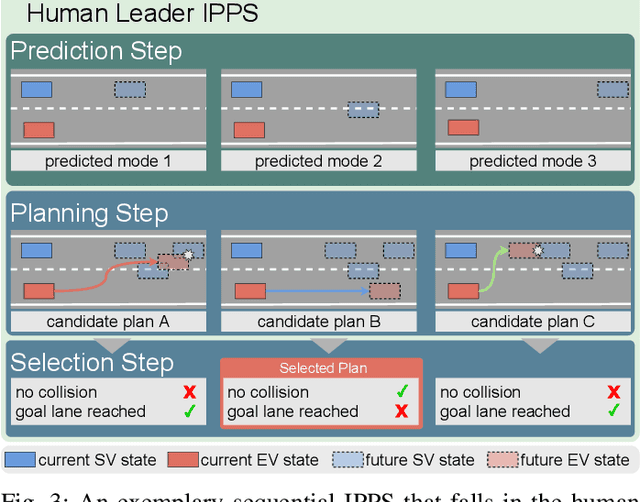
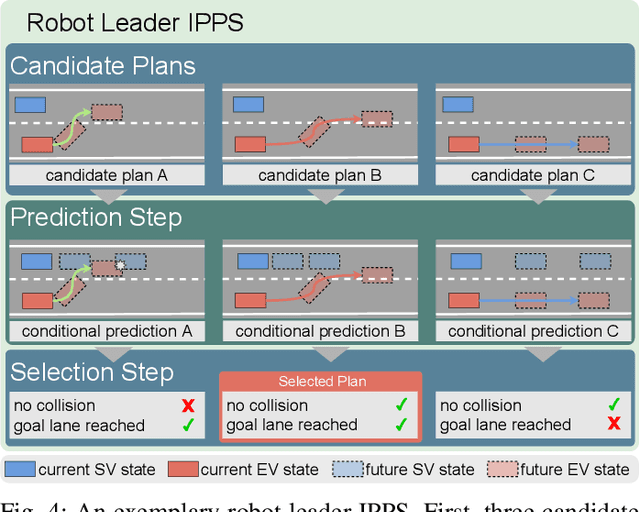
Automated driving has the potential to revolutionize personal, public, and freight mobility. Besides the enormous challenge of perception, i.e. accurately perceiving the environment using available sensor data, automated driving comprises planning a safe, comfortable, and efficient motion trajectory. To promote safety and progress, many works rely on modules that predict the future motion of surrounding traffic. Modular automated driving systems commonly handle prediction and planning as sequential separate tasks. While this accounts for the influence of surrounding traffic on the ego-vehicle, it fails to anticipate the reactions of traffic participants to the ego-vehicle's behavior. Recent works suggest that integrating prediction and planning in an interdependent joint step is necessary to achieve safe, efficient, and comfortable driving. While various models implement such integrated systems, a comprehensive overview and theoretical understanding of different principles are lacking. We systematically review state-of-the-art deep learning-based prediction, planning, and integrated prediction and planning models. Different facets of the integration ranging from model architecture and model design to behavioral aspects are considered and related to each other. Moreover, we discuss the implications, strengths, and limitations of different integration methods. By pointing out research gaps, describing relevant future challenges, and highlighting trends in the research field, we identify promising directions for future research.
Stay on Track: A Frenet Wrapper to Overcome Off-road Trajectories in Vehicle Motion Prediction
Jun 01, 2023Predicting the future motion of observed vehicles is a crucial enabler for safe autonomous driving. The field of motion prediction has seen large progress recently with State-of-the-Art (SotA) models achieving impressive results on large-scale public benchmarks. However, recent work revealed that learning-based methods are prone to predict off-road trajectories in challenging scenarios. These can be created by perturbing existing scenarios with additional turns in front of the target vehicle while the motion history is left unchanged. We argue that this indicates that SotA models do not consider the map information sufficiently and demonstrate how this can be solved, by representing model inputs and outputs in a Frenet frame defined by lane centreline sequences. To this end, we present a general wrapper that leverages a Frenet representation of the scene and that can be applied to SotA models without changing their architecture. We demonstrate the effectiveness of this approach in a comprehensive benchmark using two SotA motion prediction models. Our experiments show that this reduces the off-road rate on challenging scenarios by more than 90\%, without sacrificing average performance.