 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJourney to the Centre of Cluster: Harnessing Interior Nodes for A/B Testing under Network Interference
Feb 04, 2026A/B testing on platforms often faces challenges from network interference, where a unit's outcome depends not only on its own treatment but also on the treatments of its network neighbors. To address this, cluster-level randomization has become standard, enabling the use of network-aware estimators. These estimators typically trim the data to retain only a subset of informative units, achieving low bias under suitable conditions but often suffering from high variance. In this paper, we first demonstrate that the interior nodes - units whose neighbors all lie within the same cluster - constitute the vast majority of the post-trimming subpopulation. In light of this, we propose directly averaging over the interior nodes to construct the mean-in-interior (MII) estimator, which circumvents the delicate reweighting required by existing network-aware estimators and substantially reduces variance in classical settings. However, we show that interior nodes are often not representative of the full population, particularly in terms of network-dependent covariates, leading to notable bias. We then augment the MII estimator with a counterfactual predictor trained on the entire network, allowing us to adjust for covariate distribution shifts between the interior nodes and full population. By rearranging the expression, we reveal that our augmented MII estimator embodies an analytical form of the point estimator within prediction-powered inference framework. This insight motivates a semi-supervised lens, wherein interior nodes are treated as labeled data subject to selection bias. Extensive and challenging simulation studies demonstrate the outstanding performance of our augmented MII estimator across various settings.
Distilling Future Temporal Knowledge with Masked Feature Reconstruction for 3D Object Detection
Dec 09, 2025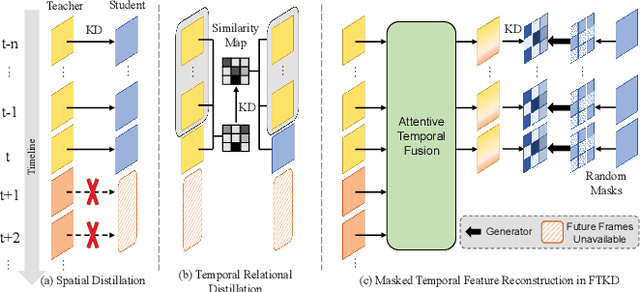
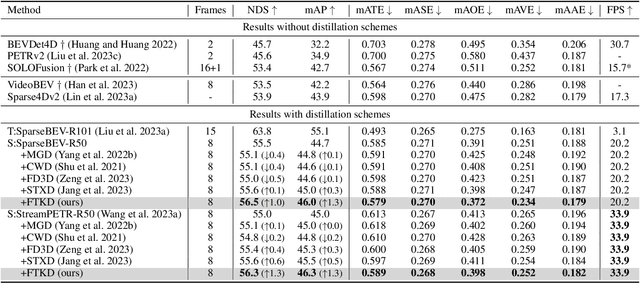
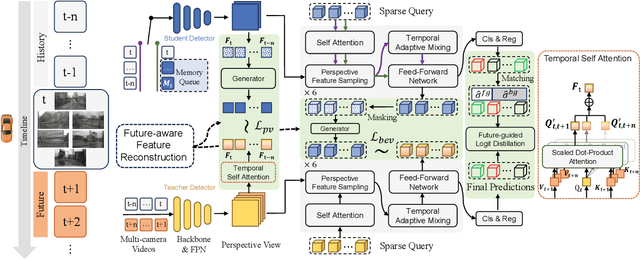
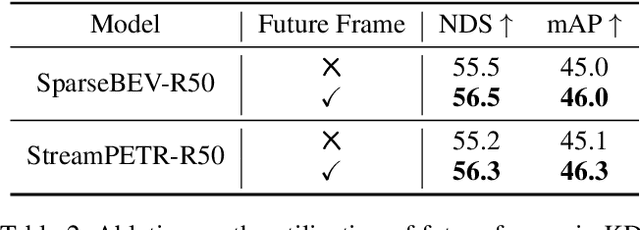
Camera-based temporal 3D object detection has shown impressive results in autonomous driving, with offline models improving accuracy by using future frames. Knowledge distillation (KD) can be an appealing framework for transferring rich information from offline models to online models. However, existing KD methods overlook future frames, as they mainly focus on spatial feature distillation under strict frame alignment or on temporal relational distillation, thereby making it challenging for online models to effectively learn future knowledge. To this end, we propose a sparse query-based approach, Future Temporal Knowledge Distillation (FTKD), which effectively transfers future frame knowledge from an offline teacher model to an online student model. Specifically, we present a future-aware feature reconstruction strategy to encourage the student model to capture future features without strict frame alignment. In addition, we further introduce future-guided logit distillation to leverage the teacher's stable foreground and background context. FTKD is applied to two high-performing 3D object detection baselines, achieving up to 1.3 mAP and 1.3 NDS gains on the nuScenes dataset, as well as the most accurate velocity estimation, without increasing inference cost.
HMVLM: Multistage Reasoning-Enhanced Vision-Language Model for Long-Tailed Driving Scenarios
Jun 06, 2025We present HaoMo Vision-Language Model (HMVLM), an end-to-end driving framework that implements the slow branch of a cognitively inspired fast-slow architecture. A fast controller outputs low-level steering, throttle, and brake commands, while a slow planner-a large vision-language model-generates high-level intents such as "yield to pedestrian" or "merge after the truck" without compromising latency. HMVLM introduces three upgrades: (1) selective five-view prompting with an embedded 4s history of ego kinematics, (2) multi-stage chain-of-thought (CoT) prompting that enforces a Scene Understanding -> Driving Decision -> Trajectory Inference reasoning flow, and (3) spline-based trajectory post-processing that removes late-stage jitter and sharp turns. Trained on the Waymo Open Dataset, these upgrades enable HMVLM to achieve a Rater Feedback Score (RFS) of 7.7367, securing 2nd place in the 2025 Waymo Vision-based End-to-End (E2E) Driving Challenge and surpassing the public baseline by 2.77%.
CogAD: Cognitive-Hierarchy Guided End-to-End Autonomous Driving
May 27, 2025While end-to-end autonomous driving has advanced significantly, prevailing methods remain fundamentally misaligned with human cognitive principles in both perception and planning. In this paper, we propose CogAD, a novel end-to-end autonomous driving model that emulates the hierarchical cognition mechanisms of human drivers. CogAD implements dual hierarchical mechanisms: global-to-local context processing for human-like perception and intent-conditioned multi-mode trajectory generation for cognitively-inspired planning. The proposed method demonstrates three principal advantages: comprehensive environmental understanding through hierarchical perception, robust planning exploration enabled by multi-level planning, and diverse yet reasonable multi-modal trajectory generation facilitated by dual-level uncertainty modeling. Extensive experiments on nuScenes and Bench2Drive demonstrate that CogAD achieves state-of-the-art performance in end-to-end planning, exhibiting particular superiority in long-tail scenarios and robust generalization to complex real-world driving conditions.
6DOF Pose Estimation of a 3D Rigid Object based on Edge-enhanced Point Pair Features
Sep 17, 2022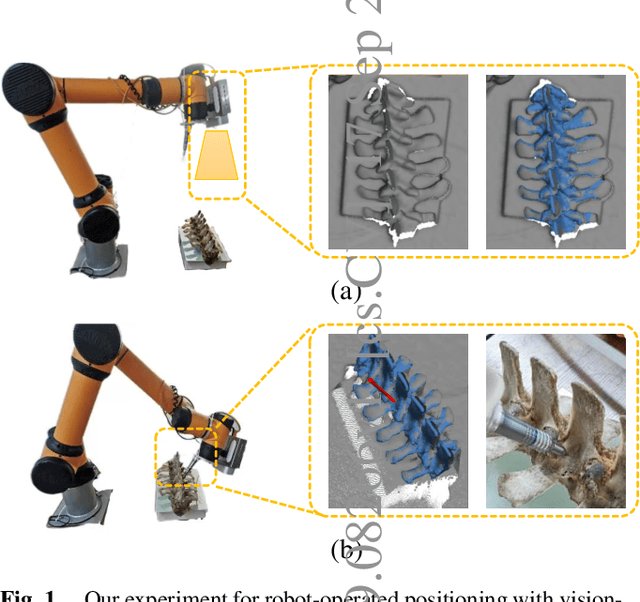
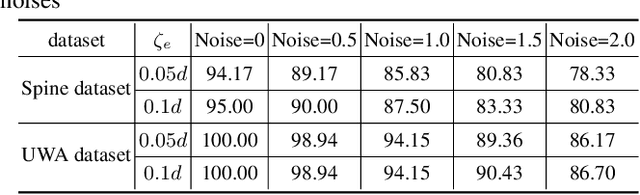
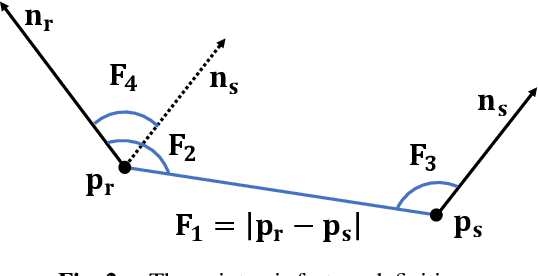
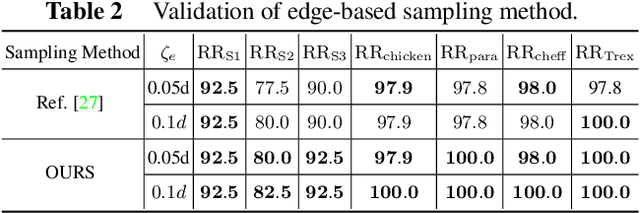
The point pair feature (PPF) is widely used for 6D pose estimation. In this paper, we propose an efficient 6D pose estimation method based on the PPF framework. We introduce a well-targeted down-sampling strategy that focuses more on edge area for efficient feature extraction of complex geometry. A pose hypothesis validation approach is proposed to resolve the symmetric ambiguity by calculating edge matching degree. We perform evaluations on two challenging datasets and one real-world collected dataset, demonstrating the superiority of our method on pose estimation of geometrically complex, occluded, symmetrical objects. We further validate our method by applying it to simulated punctures.
TriVoC: Efficient Voting-based Consensus Maximization for Robust Point Cloud Registration with Extreme Outlier Ratios
Nov 01, 2021
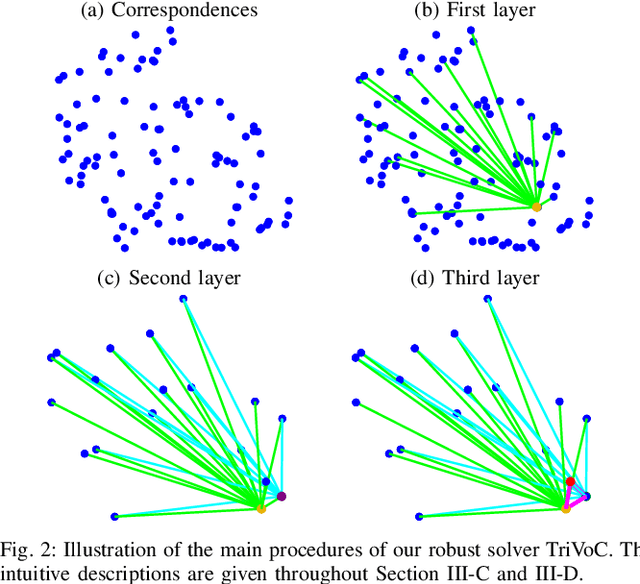
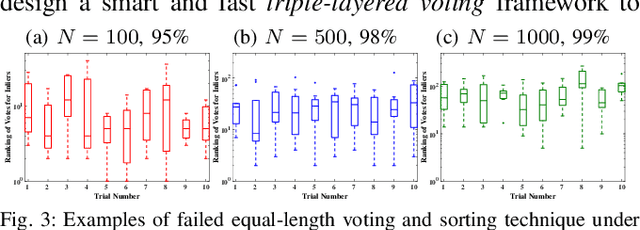
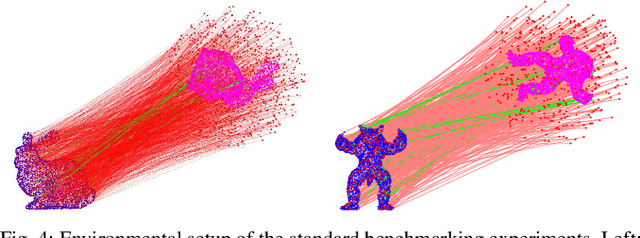
Correspondence-based point cloud registration is a cornerstone in robotics perception and computer vision, which seeks to estimate the best rigid transformation aligning two point clouds from the putative correspondences. However, due to the limited robustness of 3D keypoint matching approaches, outliers, probably in large numbers, are prone to exist among the correspondences, which makes robust registration methods imperative. Unfortunately, existing robust methods have their own limitations (e.g. high computational cost or limited robustness) when facing high or extreme outlier ratios, probably unsuitable for practical use. In this paper, we present a novel, fast, deterministic and guaranteed robust solver, named TriVoC (Triple-layered Voting with Consensus maximization), for the robust registration problem. We decompose the selecting of the minimal 3-point sets into 3 consecutive layers, and in each layer we design an efficient voting and correspondence sorting framework on the basis of the pairwise equal-length constraint. In this manner, the 3-point sets can be selected independently from the reduced correspondence sets according to the sorted sequence, which can significantly lower the computational cost and meanwhile provide a strong guarantee to achieve the largest consensus set (as the final inlier set) as long as a probabilistic termination condition is fulfilled. Varied experiments show that our solver TriVoC is robust against up to 99% outliers, highly accurate, time-efficient even with extreme outlier ratios, and also practical for real-world applications, showing performance superior to other state-of-the-art competitors.