 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimized Path Planning for Logistics Robots Using Ant Colony Algorithm under Multiple Constraints
Apr 06, 2025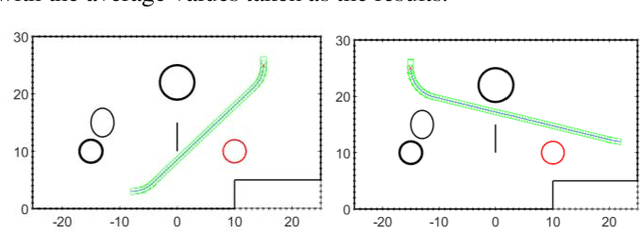



With the rapid development of the logistics industry, the path planning of logistics vehicles has become increasingly complex, requiring consideration of multiple constraints such as time windows, task sequencing, and motion smoothness. Traditional path planning methods often struggle to balance these competing demands efficiently. In this paper, we propose a path planning technique based on the Ant Colony Optimization (ACO) algorithm to address these challenges. The proposed method optimizes key performance metrics, including path length, task completion time, turning counts, and motion smoothness, to ensure efficient and practical route planning for logistics vehicles. Experimental results demonstrate that the ACO-based approach outperforms traditional methods in terms of both efficiency and adaptability. This study provides a robust solution for logistics vehicle path planning, offering significant potential for real-world applications in dynamic and constrained environments.
Research on the Online Update Method for Retrieval-Augmented Generation (RAG) Model with Incremental Learning
Jan 13, 2025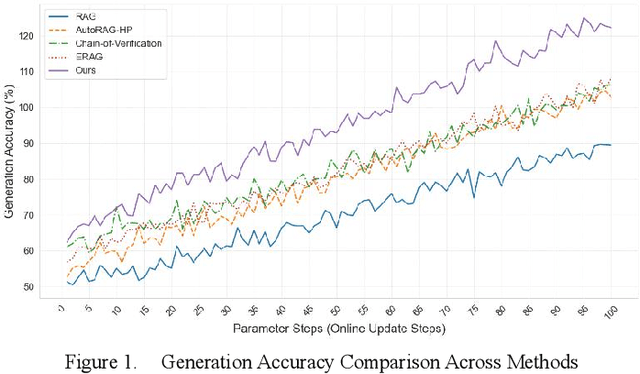
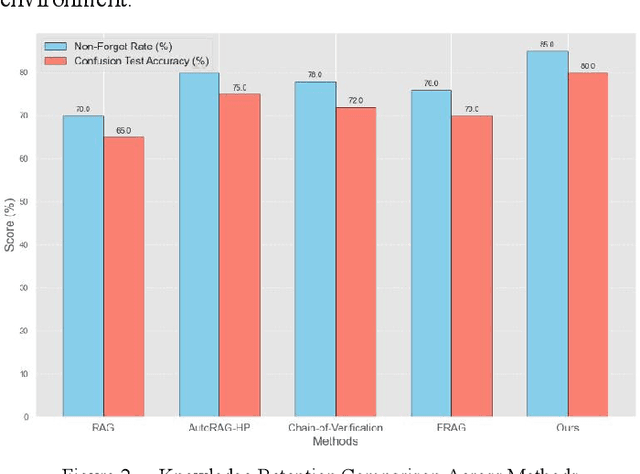
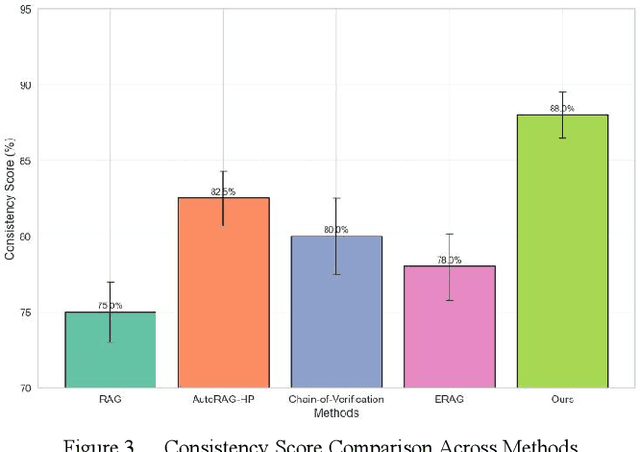
In the contemporary context of rapid advancements in information technology and the exponential growth of data volume, language models are confronted with significant challenges in effectively navigating the dynamic and ever-evolving information landscape to update and adapt to novel knowledge in real time. In this work, an online update method is proposed, which is based on the existing Retrieval Enhanced Generation (RAG) model with multiple innovation mechanisms. Firstly, the dynamic memory is used to capture the emerging data samples, and then gradually integrate them into the core model through a tunable knowledge distillation strategy. At the same time, hierarchical indexing and multi-layer gating mechanism are introduced into the retrieval module to ensure that the retrieved content is more targeted and accurate. Finally, a multi-stage network structure is established for different types of inputs in the generation stage, and cross-attention matching and screening are carried out on the intermediate representations of each stage to ensure the effective integration and iterative update of new and old knowledge. Experimental results show that the proposed method is better than the existing mainstream comparison models in terms of knowledge retention and inference accuracy.
Trajectory Tracking Using Frenet Coordinates with Deep Deterministic Policy Gradient
Nov 21, 2024This paper studies the application of the DDPG algorithm in trajectory-tracking tasks and proposes a trajectorytracking control method combined with Frenet coordinate system. By converting the vehicle's position and velocity information from the Cartesian coordinate system to Frenet coordinate system, this method can more accurately describe the vehicle's deviation and travel distance relative to the center line of the road. The DDPG algorithm adopts the Actor-Critic framework, uses deep neural networks for strategy and value evaluation, and combines the experience replay mechanism and target network to improve the algorithm's stability and data utilization efficiency. Experimental results show that the DDPG algorithm based on Frenet coordinate system performs well in trajectory-tracking tasks in complex environments, achieves high-precision and stable path tracking, and demonstrates its application potential in autonomous driving and intelligent transportation systems. Keywords- DDPG; path tracking; robot navigation
Research on reinforcement learning based warehouse robot navigation algorithm in complex warehouse layout
Nov 09, 2024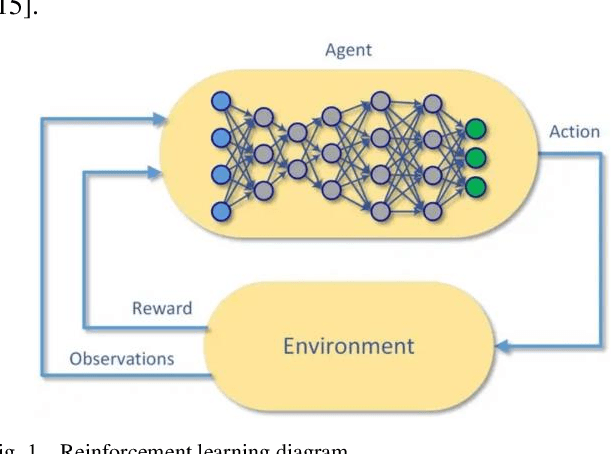
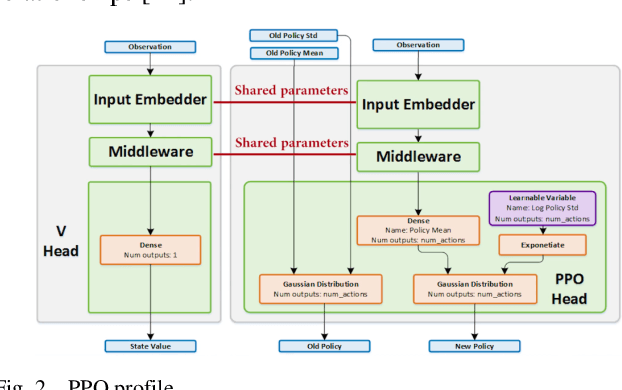
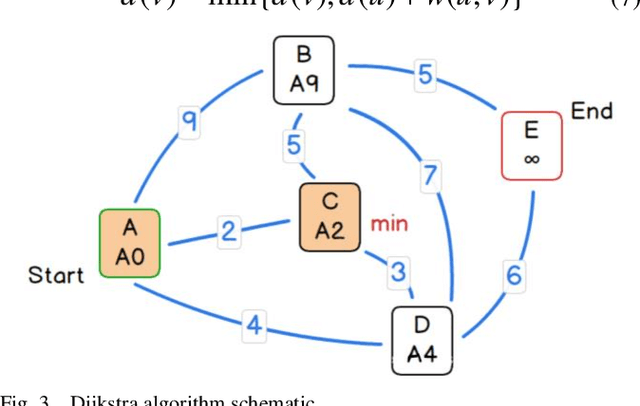
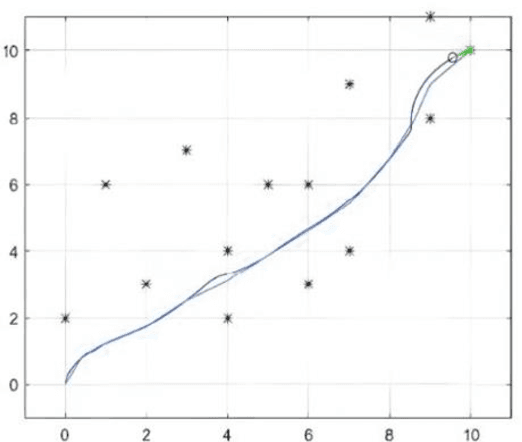
In this paper, how to efficiently find the optimal path in complex warehouse layout and make real-time decision is a key problem. This paper proposes a new method of Proximal Policy Optimization (PPO) and Dijkstra's algorithm, Proximal policy-Dijkstra (PP-D). PP-D method realizes efficient strategy learning and real-time decision making through PPO, and uses Dijkstra algorithm to plan the global optimal path, thus ensuring high navigation accuracy and significantly improving the efficiency of path planning. Specifically, PPO enables robots to quickly adapt and optimize action strategies in dynamic environments through its stable policy updating mechanism. Dijkstra's algorithm ensures global optimal path planning in static environment. Finally, through the comparison experiment and analysis of the proposed framework with the traditional algorithm, the results show that the PP-D method has significant advantages in improving the accuracy of navigation prediction and enhancing the robustness of the system. Especially in complex warehouse layout, PP-D method can find the optimal path more accurately and reduce collision and stagnation. This proves the reliability and effectiveness of the robot in the study of complex warehouse layout navigation algorithm.