 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Robust Nonlinear Subspace Clustering: A Kernel Learning Approach
Jan 10, 2025Kernel-based subspace clustering, which addresses the nonlinear structures in data, is an evolving area of research. Despite noteworthy progressions, prevailing methodologies predominantly grapple with limitations relating to (i) the influence of predefined kernels on model performance; (ii) the difficulty of preserving the original manifold structures in the nonlinear space; (iii) the dependency of spectral-type strategies on the ideal block diagonal structure of the affinity matrix. This paper presents DKLM, a novel paradigm for kernel-induced nonlinear subspace clustering. DKLM provides a data-driven approach that directly learns the kernel from the data's self-representation, ensuring adaptive weighting and satisfying the multiplicative triangle inequality constraint, which enhances the robustness of the learned kernel. By leveraging this learned kernel, DKLM preserves the local manifold structure of data in a nonlinear space while promoting the formation of an optimal block-diagonal affinity matrix. A thorough theoretical examination of DKLM reveals its relationship with existing clustering paradigms. Comprehensive experiments on synthetic and real-world datasets demonstrate the effectiveness of the proposed method.
Drift2Matrix: Kernel-Induced Self Representation for Concept Drift Adaptation in Co-evolving Time Series
Jan 02, 2025



In the realm of time series analysis, tackling the phenomenon of concept drift poses a significant challenge. Concept drift -- characterized by the evolving statistical properties of time series data, affects the reliability and accuracy of conventional analysis models. This is particularly evident in co-evolving scenarios where interactions among variables are crucial. This paper presents Drift2Matrix, a novel framework that leverages kernel-induced self-representation for adaptive responses to concept drift in time series. Drift2Matrix employs a kernel-based learning mechanism to generate a representation matrix, encapsulating the inherent dynamics of co-evolving time series. This matrix serves as a key tool for identification and adaptation to concept drift by observing its temporal variations. Furthermore, Drift2Matrix effectively identifies prevailing patterns and offers insights into emerging trends through pattern evolution analysis. Our empirical evaluation of Drift2Matrix across various datasets demonstrates its effectiveness in handling the complexities of concept drift. This approach introduces a novel perspective in the theoretical domain of co-evolving time series analysis, enhancing adaptability and accuracy in the face of dynamic data environments.
Trajectory Tracking Using Frenet Coordinates with Deep Deterministic Policy Gradient
Nov 21, 2024This paper studies the application of the DDPG algorithm in trajectory-tracking tasks and proposes a trajectorytracking control method combined with Frenet coordinate system. By converting the vehicle's position and velocity information from the Cartesian coordinate system to Frenet coordinate system, this method can more accurately describe the vehicle's deviation and travel distance relative to the center line of the road. The DDPG algorithm adopts the Actor-Critic framework, uses deep neural networks for strategy and value evaluation, and combines the experience replay mechanism and target network to improve the algorithm's stability and data utilization efficiency. Experimental results show that the DDPG algorithm based on Frenet coordinate system performs well in trajectory-tracking tasks in complex environments, achieves high-precision and stable path tracking, and demonstrates its application potential in autonomous driving and intelligent transportation systems. Keywords- DDPG; path tracking; robot navigation
Are KAN Effective for Identifying and Tracking Concept Drift in Time Series?
Oct 13, 2024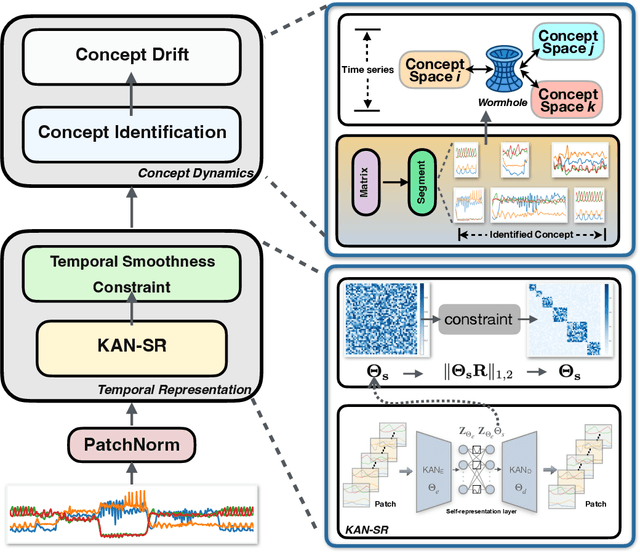

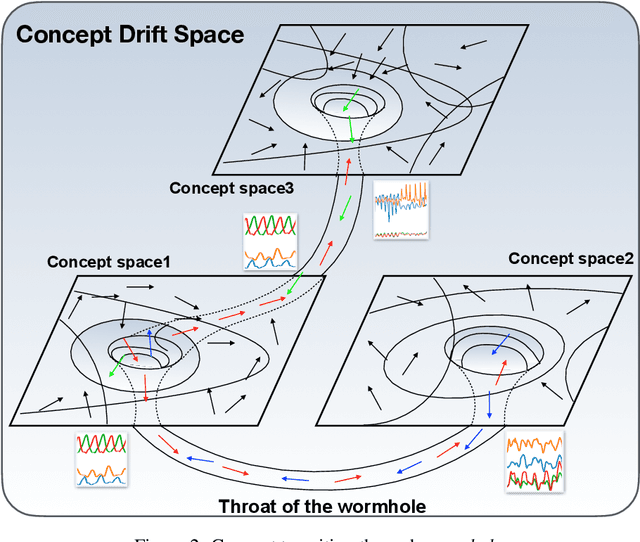

Dynamic concepts in time series are crucial for understanding complex systems such as financial markets, healthcare, and online activity logs. These concepts help reveal structures and behaviors in sequential data for better decision-making and forecasting. Existing models struggle with detecting and tracking concept drift due to limitations in interpretability and adaptability. This paper introduces Kolmogorov-Arnold Networks (KAN) into time series and proposes WormKAN, a KAN-based auto-encoder to address concept drift in co-evolving time series. WormKAN integrates the KAN-SR module, in which the encoder, decoder, and self-representation layer are built on KAN, along with a temporal constraint to capture concept transitions. These transitions, akin to passing through a "wormhole", are identified by abrupt changes in the latent space. Experiments show that KAN and KAN-based models (WormKAN) effectively segment time series into meaningful concepts, enhancing the identification and tracking of concept drifts.
Wormhole: Concept-Aware Deep Representation Learning for Co-Evolving Sequences
Sep 20, 2024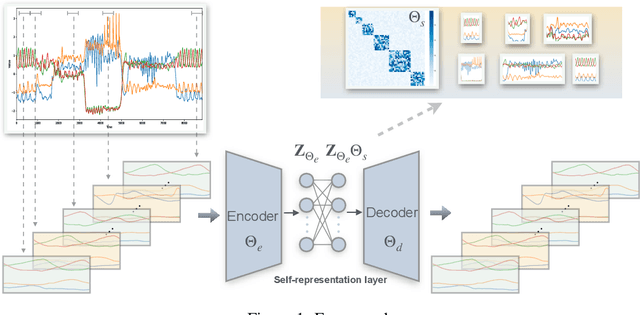

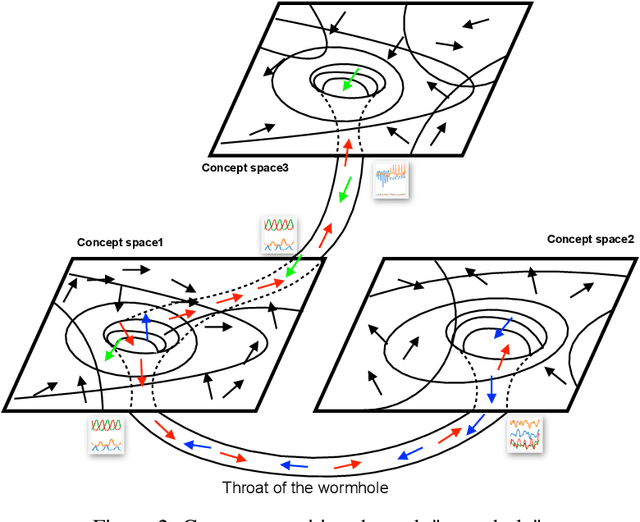
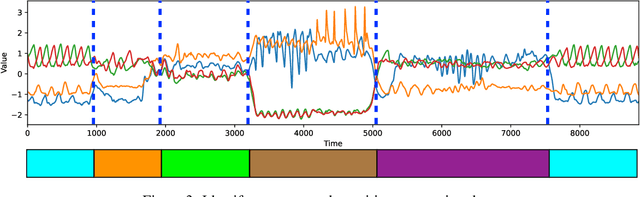
Identifying and understanding dynamic concepts in co-evolving sequences is crucial for analyzing complex systems such as IoT applications, financial markets, and online activity logs. These concepts provide valuable insights into the underlying structures and behaviors of sequential data, enabling better decision-making and forecasting. This paper introduces Wormhole, a novel deep representation learning framework that is concept-aware and designed for co-evolving time sequences. Our model presents a self-representation layer and a temporal smoothness constraint to ensure robust identification of dynamic concepts and their transitions. Additionally, concept transitions are detected by identifying abrupt changes in the latent space, signifying a shift to new behavior - akin to passing through a wormhole. This novel mechanism accurately discerns concepts within co-evolving sequences and pinpoints the exact locations of these wormholes, enhancing the interpretability of the learned representations. Experiments demonstrate that this method can effectively segment time series data into meaningful concepts, providing a valuable tool for analyzing complex temporal patterns and advancing the detection of concept drifts.
Analyzing the factors that are involved in length of inpatient stay at the hospital for diabetes patients
Jun 07, 2024The paper investigates the escalating concerns surrounding the surge in diabetes cases, exacerbated by the COVID-19 pandemic, and the subsequent strain on medical resources. The research aims to construct a predictive model quantifying factors influencing inpatient hospital stay durations for diabetes patients, offering insights to hospital administrators for improved patient management strategies. The literature review highlights the increasing prevalence of diabetes, emphasizing the need for continued attention and analysis of urban-rural disparities in healthcare access. International studies underscore the financial implications and healthcare burden associated with diabetes-related hospitalizations and complications, emphasizing the significance of effective management strategies. The methodology involves a quantitative approach, utilizing a dataset comprising 10,000 observations of diabetic inpatient encounters in U.S. hospitals from 1999 to 2008. Predictive modeling techniques, particularly Generalized Linear Models (GLM), are employed to develop a model predicting hospital stay durations based on patient demographics, admission types, medical history, and treatment regimen. The results highlight the influence of age, medical history, and treatment regimen on hospital stay durations for diabetes patients. Despite model limitations, such as heteroscedasticity and deviations from normality in residual analysis, the findings offer valuable insights for hospital administrators in patient management. The paper concludes with recommendations for future research to address model limitations and explore the implications of predictive models on healthcare management strategies, ensuring equitable patient care and resource allocation.
DRNet: A Decision-Making Method for Autonomous Lane Changingwith Deep Reinforcement Learning
Nov 02, 2023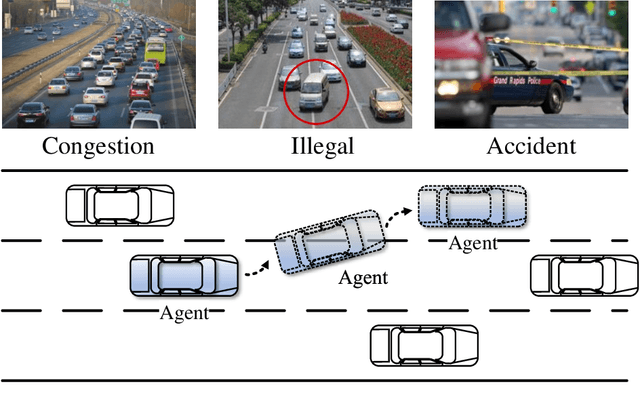
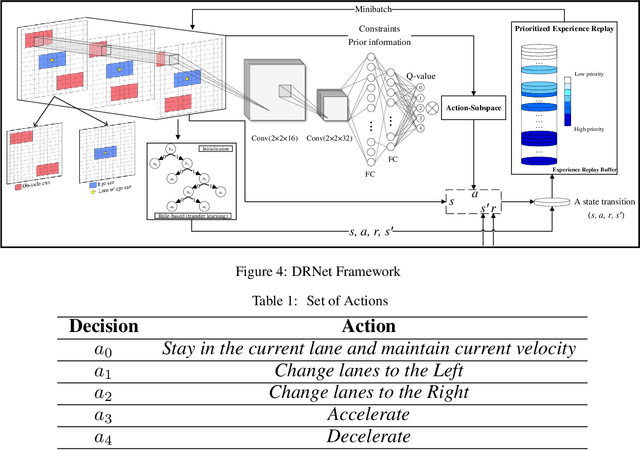
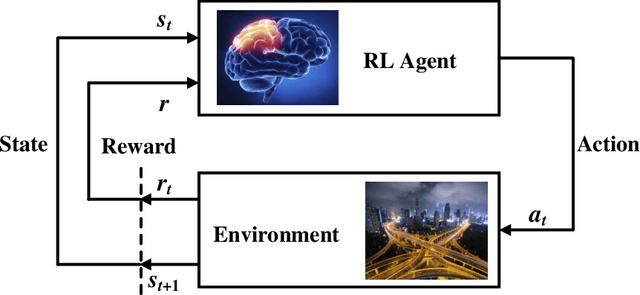
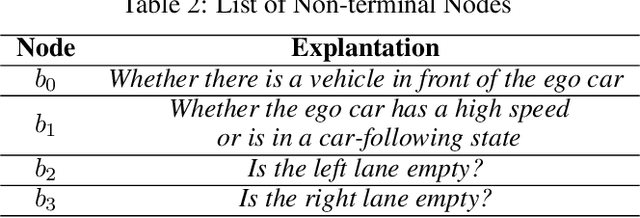
Machine learning techniques have outperformed numerous rule-based methods for decision-making in autonomous vehicles. Despite recent efforts, lane changing remains a major challenge, due to the complex driving scenarios and changeable social behaviors of surrounding vehicles. To help improve the state of the art, we propose to leveraging the emerging \underline{D}eep \underline{R}einforcement learning (DRL) approach for la\underline{NE} changing at the \underline{T}actical level. To this end, we present "DRNet", a novel and highly efficient DRL-based framework that enables a DRL agent to learn to drive by executing reasonable lane changing on simulated highways with an arbitrary number of lanes, and considering driving style of surrounding vehicles to make better decisions. Furthermore, to achieve a safe policy for decision-making, DRNet incorporates ideas from safety verification, the most important component of autonomous driving, to ensure that only safe actions are chosen at any time. The setting of our state representation and reward function enables the trained agent to take appropriate actions in a real-world-like simulator. Our DRL agent has the ability to learn the desired task without causing collisions and outperforms DDQN and other baseline models.