 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResearch on reinforcement learning based warehouse robot navigation algorithm in complex warehouse layout
Paper and Code
Nov 09, 2024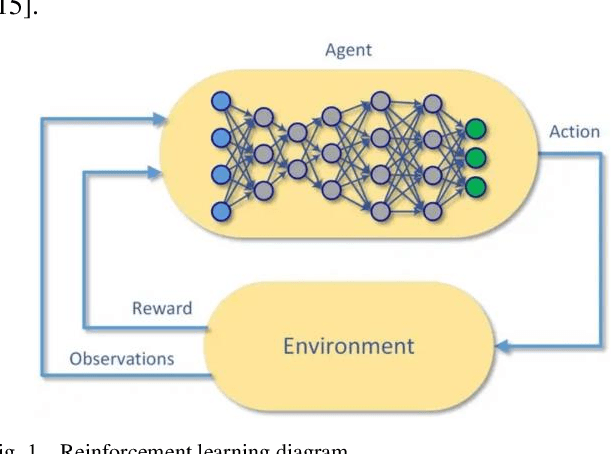
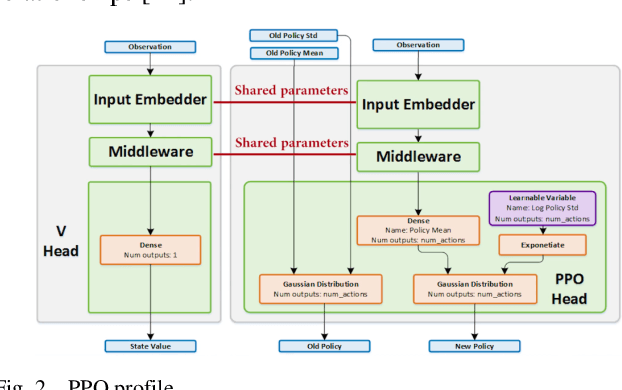
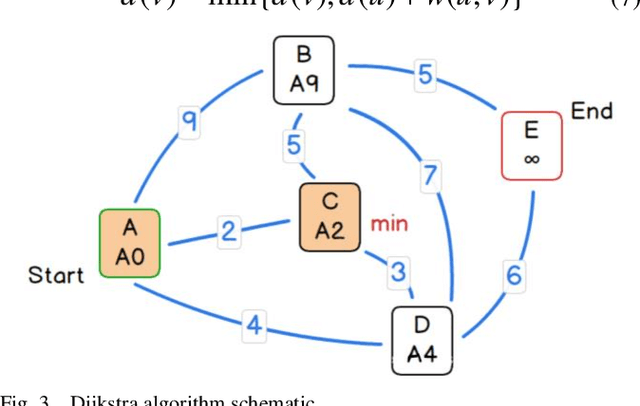
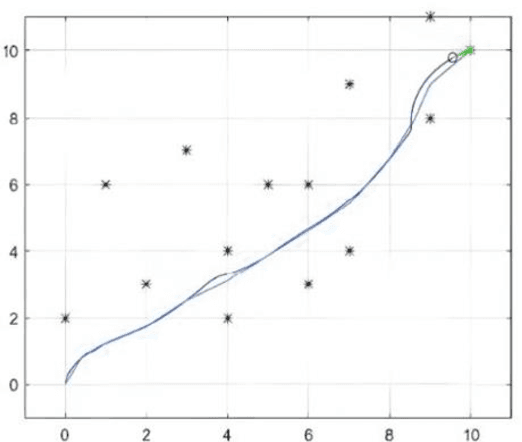
In this paper, how to efficiently find the optimal path in complex warehouse layout and make real-time decision is a key problem. This paper proposes a new method of Proximal Policy Optimization (PPO) and Dijkstra's algorithm, Proximal policy-Dijkstra (PP-D). PP-D method realizes efficient strategy learning and real-time decision making through PPO, and uses Dijkstra algorithm to plan the global optimal path, thus ensuring high navigation accuracy and significantly improving the efficiency of path planning. Specifically, PPO enables robots to quickly adapt and optimize action strategies in dynamic environments through its stable policy updating mechanism. Dijkstra's algorithm ensures global optimal path planning in static environment. Finally, through the comparison experiment and analysis of the proposed framework with the traditional algorithm, the results show that the PP-D method has significant advantages in improving the accuracy of navigation prediction and enhancing the robustness of the system. Especially in complex warehouse layout, PP-D method can find the optimal path more accurately and reduce collision and stagnation. This proves the reliability and effectiveness of the robot in the study of complex warehouse layout navigation algorithm.