 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimized Path Planning for Logistics Robots Using Ant Colony Algorithm under Multiple Constraints
Paper and Code
Apr 06, 2025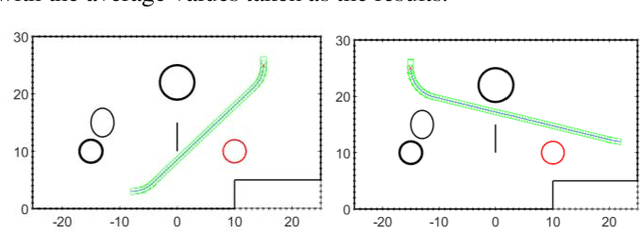



With the rapid development of the logistics industry, the path planning of logistics vehicles has become increasingly complex, requiring consideration of multiple constraints such as time windows, task sequencing, and motion smoothness. Traditional path planning methods often struggle to balance these competing demands efficiently. In this paper, we propose a path planning technique based on the Ant Colony Optimization (ACO) algorithm to address these challenges. The proposed method optimizes key performance metrics, including path length, task completion time, turning counts, and motion smoothness, to ensure efficient and practical route planning for logistics vehicles. Experimental results demonstrate that the ACO-based approach outperforms traditional methods in terms of both efficiency and adaptability. This study provides a robust solution for logistics vehicle path planning, offering significant potential for real-world applications in dynamic and constrained environments.