 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Clustering-Based Variable Ordering Framework for Relaxed Decision Diagrams for Maximum Weighted Independent Set Problem
Dec 17, 2025



Efficient exact algorithms for Discrete Optimization (DO) rely heavily on strong primal and dual bounds. Relaxed Decision Diagrams (DDs) provide a versatile mechanism for deriving such dual bounds by compactly over-approximating the solution space through node merging. However, the quality of these relaxed diagrams, i.e. the tightness of the resulting dual bounds, depends critically on the variable ordering and the merging decisions executed during compilation. While dynamic variable ordering heuristics effectively tighten bounds, they often incur computational overhead when evaluated globally across the entire variable set. To mitigate this trade-off, this work introduces a novel clustering-based framework for variable ordering. Instead of applying dynamic ordering heuristics to the full set of unfixed variables, we first partition variables into clusters. We then leverage this structural decomposition to guide the ordering process, significantly reducing the heuristic's search space. Within this framework, we investigate two distinct strategies: Cluster-to-Cluster, which processes clusters sequentially using problem-specific aggregate criteria (such as cumulative vertex weights in the Maximum Weighted Independent Set Problem (MWISP)), and Pick-and-Sort, which iteratively selects and sorts representative variables from each cluster to balance local diversity with heuristic guidance. Later on, developing some theoretical results on the growth of the size of DDs for MWISP we propose two different policies for setting the number of clusters within the proposed framework. We embed these strategies into a DD-based branch-and-bound algorithm and evaluate them on the MWISP. Across benchmark instances, the proposed methodology consistently reduces computational costs compared to standard dynamic variable ordering baseline.
PARCO: Learning Parallel Autoregressive Policies for Efficient Multi-Agent Combinatorial Optimization
Sep 05, 2024



Multi-agent combinatorial optimization problems such as routing and scheduling have great practical relevance but present challenges due to their NP-hard combinatorial nature, hard constraints on the number of possible agents, and hard-to-optimize objective functions. This paper introduces PARCO (Parallel AutoRegressive Combinatorial Optimization), a novel approach that learns fast surrogate solvers for multi-agent combinatorial problems with reinforcement learning by employing parallel autoregressive decoding. We propose a model with a Multiple Pointer Mechanism to efficiently decode multiple decisions simultaneously by different agents, enhanced by a Priority-based Conflict Handling scheme. Moreover, we design specialized Communication Layers that enable effective agent collaboration, thus enriching decision-making. We evaluate PARCO in representative multi-agent combinatorial problems in routing and scheduling and demonstrate that our learned solvers offer competitive results against both classical and neural baselines in terms of both solution quality and speed. We make our code openly available at https://github.com/ai4co/parco.
Identification and Estimation of the Bi-Directional MR with Some Invalid Instruments
Jul 10, 2024



We consider the challenging problem of estimating causal effects from purely observational data in the bi-directional Mendelian randomization (MR), where some invalid instruments, as well as unmeasured confounding, usually exist. To address this problem, most existing methods attempt to find proper valid instrumental variables (IVs) for the target causal effect by expert knowledge or by assuming that the causal model is a one-directional MR model. As such, in this paper, we first theoretically investigate the identification of the bi-directional MR from observational data. In particular, we provide necessary and sufficient conditions under which valid IV sets are correctly identified such that the bi-directional MR model is identifiable, including the causal directions of a pair of phenotypes (i.e., the treatment and outcome). Moreover, based on the identification theory, we develop a cluster fusion-like method to discover valid IV sets and estimate the causal effects of interest. We theoretically demonstrate the correctness of the proposed algorithm. Experimental results show the effectiveness of our method for estimating causal effects in bi-directional MR.
Introducing Combi-Stations in Robotic Mobile Fulfilment Systems: A Queueing-Theory-Based Efficiency Analysis
Mar 19, 2024



In the era of digital commerce, the surge in online shopping and the expectation for rapid delivery have placed unprecedented demands on warehouse operations. The traditional method of order fulfilment, where human order pickers traverse large storage areas to pick items, has become a bottleneck, consuming valuable time and resources. Robotic Mobile Fulfilment Systems (RMFS) offer a solution by using robots to transport storage racks directly to human-operated picking stations, eliminating the need for pickers to travel. This paper introduces combi-stations, a novel type of station that enables both item picking and replenishment, as opposed to traditional separate stations. We analyse the efficiency of combi-stations using queueing theory and demonstrate their potential to streamline warehouse operations. Our results suggest that combi-stations can reduce the number of robots required for stability and significantly reduce order turnover time, indicating a promising direction for future warehouse automation.
How to Integrate Digital Twin and Virtual Reality in Robotics Systems? Design and Implementation for Providing Robotics Maintenance Services in Data Centers
Dec 20, 2023In the context of Industry 4.0, the physical and digital worlds are closely connected, and robots are widely used to achieve system automation. Digital twin solutions have contributed significantly to the growth of Industry 4.0. Combining various technologies is a trend that aims to improve system performance. For example, digital twinning can be combined with virtual reality in automated systems. This paper proposes a new concept to articulate this combination, which has mainly been implemented in engineering research projects. However, there are currently no guidelines, plans, or concepts to articulate this combination. The concept will be implemented in data centers, which are crucial for enabling virtual tasks in our daily lives. Due to the COVID-19 pandemic, there has been a surge in demand for services such as e-commerce and videoconferencing. Regular maintenance is necessary to ensure uninterrupted and reliable services. Manual maintenance strategies may not be sufficient to meet the current high demand, and innovative approaches are needed to address the problem. This paper presents a novel approach to data center maintenance: real-time monitoring by an autonomous robot. The robot is integrated with digital twins of assets and a virtual reality interface that allows human personnel to control it and respond to alarms. This methodology enables faster, more cost-effective, and higher quality data center maintenance. It has been validated in a real data centre and can be used for intelligent monitoring and management through joint data sources. The method has potential applications in other automated systems.
Extend the FFmpeg Framework to Analyze Media Content
Mar 05, 2021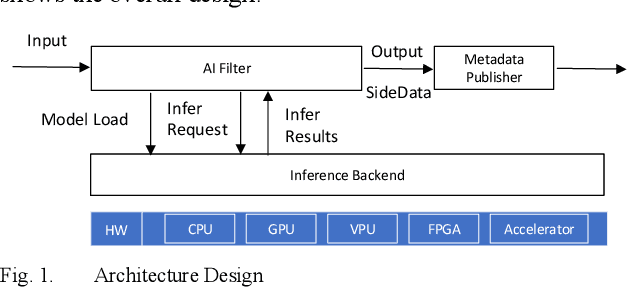
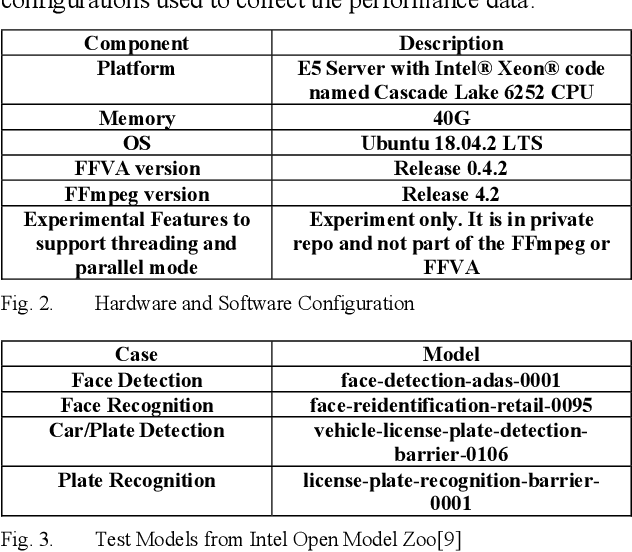
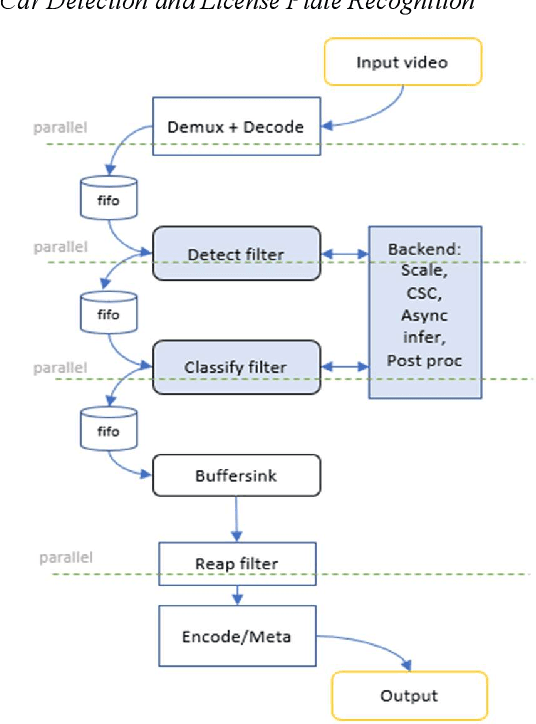
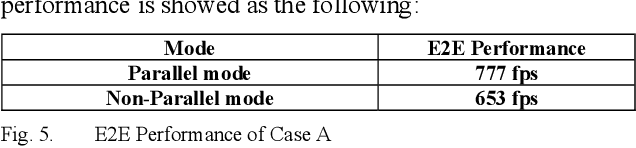
This paper introduces a new set of video analytics plugins developed for the FFmpeg framework. Multimedia applications that increasingly utilize the FFmpeg media features for its comprehensive media encoding, decoding, muxing, and demuxing capabilities can now additionally analyze the video content based on AI models. The plugins are thread optimized for best performance overcoming certain FFmpeg threading limitations. The plugins utilize the Intel OpenVINO Toolkit inference engine as the backend. The analytics workloads are accelerated on different platforms such as CPU, GPU, FPGA or specialized analytics accelerators. With our reference implementation, the feature of OpenVINO as inference backend has been pushed into FFmpeg mainstream repository. We plan to submit more patches later.
Formulating and solving integrated order batching and routing in multi-depot AGV-assisted mixed-shelves warehouses
Jan 27, 2021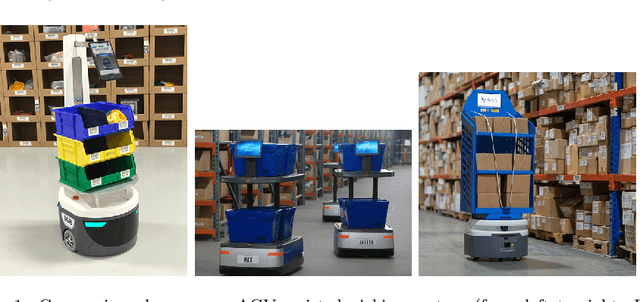
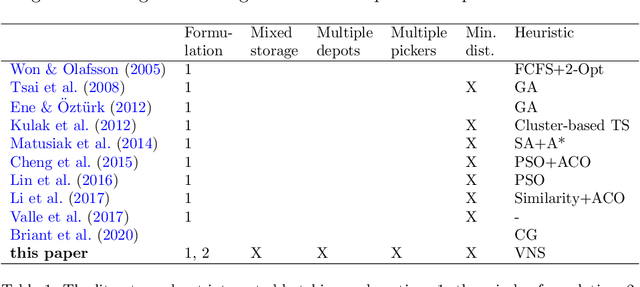
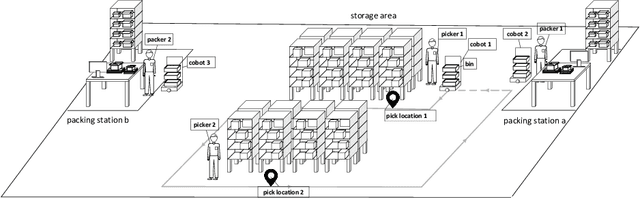
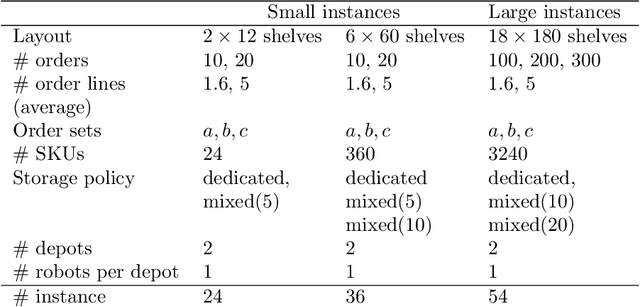
Different retail and e-commerce companies are facing the challenge of assembling large numbers of time-critical picking orders that include both single-line and multi-line orders. To reduce unproductive picker working time as in traditional picker-to-parts warehousing systems, different solutions are proposed in the literature and in practice. For example, in a mixed-shelves storage policy, items of the same stock keeping unit are spread over several shelves in a warehouse; or automated guided vehicles (AGVs) are used to transport the picked items from the storage area to packing stations instead of human pickers. This is the first paper to combine both solutions, creating what we call AGV-assisted mixed-shelves picking systems. We model the new integrated order batching and routing problem in such systems as an extended multi-depot vehicle routing problem with both three-index and two-commodity network flow formulations. Due to the complexity of the integrated problem, we develop a novel variable neighborhood search algorithm to solve the integrated problem more efficiently. We test our methods with different sizes of instances, and conclude that the mixed-shelves storage policy is more suitable than the usual storage policy in AGV-assisted mixed-shelves systems for both single-line and multi-line orders (saving up to 67% on driving distances for AGVs). Our variable neighborhood search algorithm provides close-to-optimal solutions within an acceptable computational time.
An Intelligent CNN-VAE Text Representation Technology Based on Text Semantics for Comprehensive Big Data
Aug 28, 2020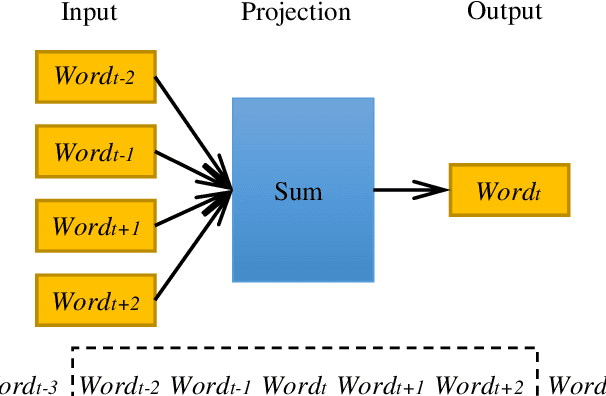
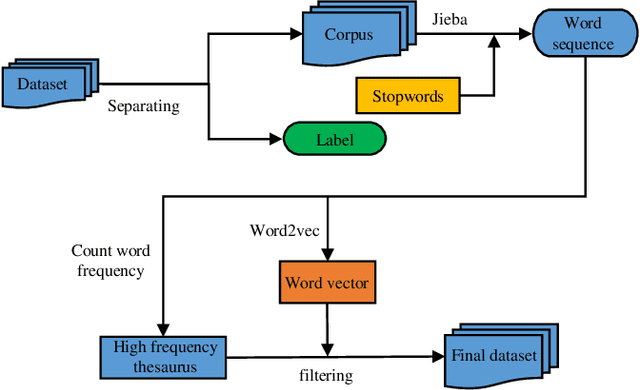
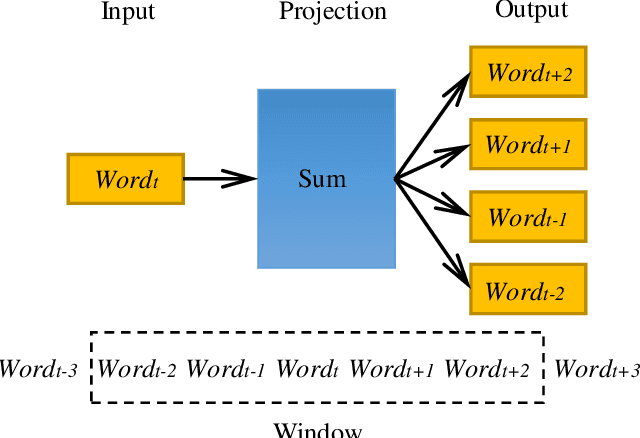
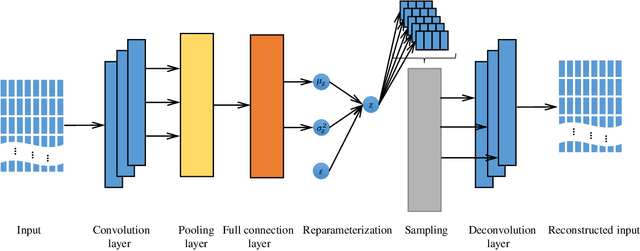
In the era of big data, a large number of text data generated by the Internet has given birth to a variety of text representation methods. In natural language processing (NLP), text representation transforms text into vectors that can be processed by computer without losing the original semantic information. However, these methods are difficult to effectively extract the semantic features among words and distinguish polysemy in language. Therefore, a text feature representation model based on convolutional neural network (CNN) and variational autoencoder (VAE) is proposed to extract the text features and apply the obtained text feature representation on the text classification tasks. CNN is used to extract the features of text vector to get the semantics among words and VAE is introduced to make the text feature space more consistent with Gaussian distribution. In addition, the output of the improved word2vec model is employed as the input of the proposed model to distinguish different meanings of the same word in different contexts. The experimental results show that the proposed model outperforms in k-nearest neighbor (KNN), random forest (RF) and support vector machine (SVM) classification algorithms.
Efficient order picking methods in robotic mobile fulfillment systems
Jan 31, 2019
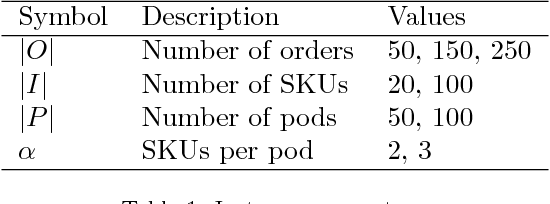
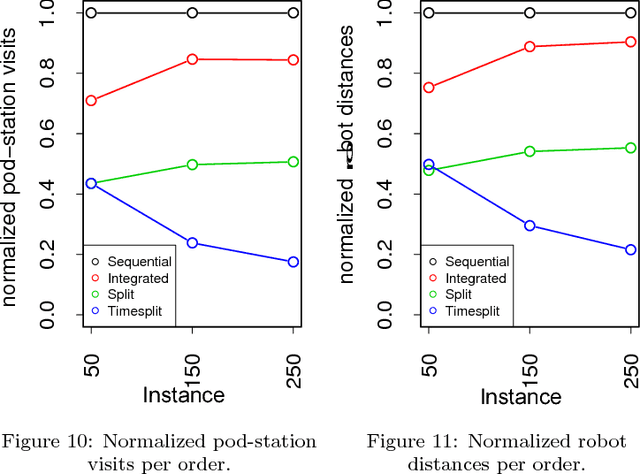
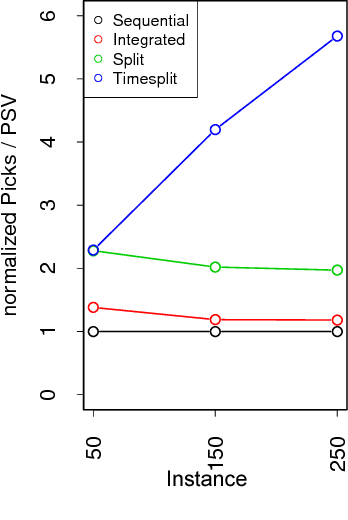
Robotic mobile fulfillment systems (RMFSs) are a new type of warehousing system, which has received more attention recently, due to increasing growth in the e-commerce sector. Instead of sending pickers to the inventory area to search for and pick the ordered items, robots carry shelves (called "pods") including ordered items from the inventory area to picking stations. In the picking stations, human pickers put ordered items into totes; then these items are transported by a conveyor to the packing stations. This type of warehousing system relieves the human pickers and improves the picking process. In this paper, we concentrate on decisions about the assignment of pods to stations and orders to stations to fulfill picking for each incoming customer's order. In previous research for an RMFS with multiple picking stations, these decisions are made sequentially. Instead, we present a new integrated model. To improve the system performance even more, we extend our model by splitting orders. This means parts of an order are allowed to be picked at different stations. To the best of the authors' knowledge, this is the first publication on split orders in an RMFS. We analyze different performance metrics, such as pile-on, pod-station visits, robot moving distance and order turn-over time. We compare the results of our models in different instances with the sequential method in our open-source simulation framework RAWSim-O.
Path planning for Robotic Mobile Fulfillment Systems
Nov 19, 2018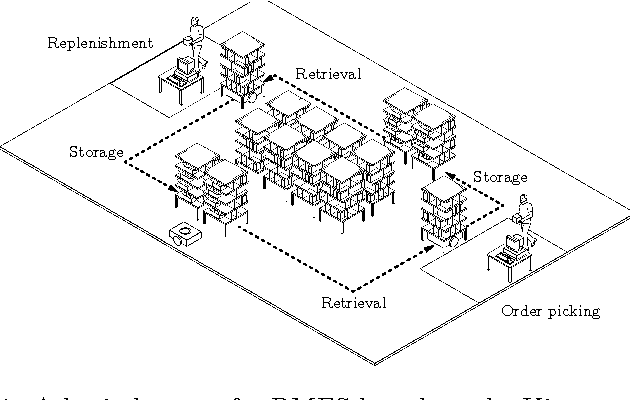
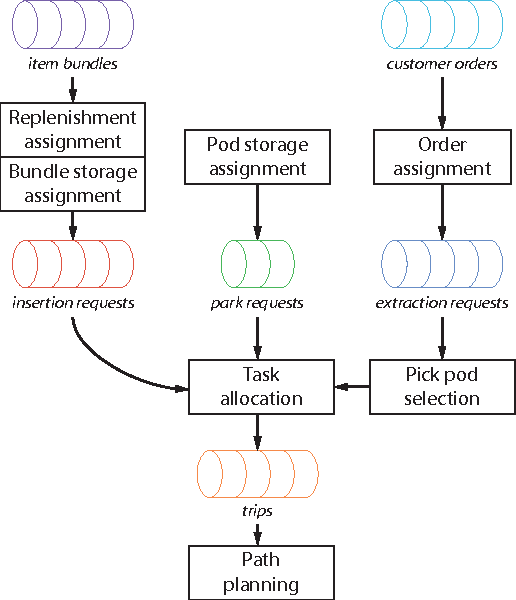
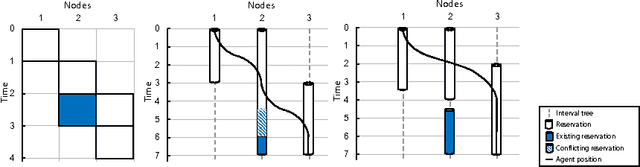
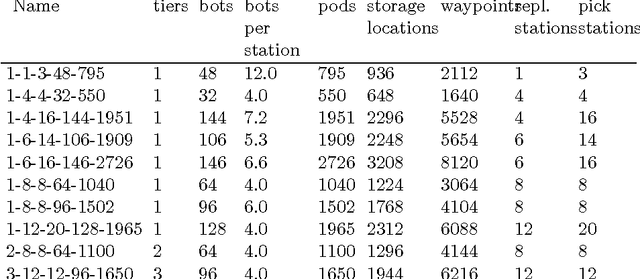
This paper presents a collection of path planning algorithms for real-time movement of multiple robots across a Robotic Mobile Fulfillment System (RMFS). Robots are assigned to move storage units to pickers at working stations instead of requiring pickers to go to the storage area. Path planning algorithms aim to find paths for the robots to fulfill the requests without collisions or deadlocks. The state-of-the-art path planning algorithms, including WHCA*, FAR, BCP, OD&ID and CBS, were adapted to suit path planning in RMFS and integrated within a simulation tool to guide the robots from their starting points to their destinations during the storage and retrieval processes. Ten different layouts with a variety of numbers of robots, floors, pods, stations and the sizes of storage areas were considered in the simulation study. Performance metrics of throughput, path length and search time were monitored. Simulation results demonstrate the best algorithm based on each performance metric.