 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePaperFlow: Profiling, Recommending, and Adapting Across Daily Paper Streams
Jun 05, 2026Scientific paper recommendation is typically evaluated as static ranking over a fixed candidate set, yet real scientific reading unfolds as a daily, longitudinal process in which interests shift and feedback accumulates. We introduce PaperFlow, a framework that organizes it into three coupled stages: Profiling, which constructs and maintains a structured, inspectable scholarly profile from heterogeneous cold-start evidence; Recommending, which ranks each date-specific paper stream through multi-signal aggregation under a fixed display budget; and Adapting, which updates user state from semantically distinct feedback signals and models interest drift across days. We further define a longitudinal user-day benchmark that fixes users, dates, candidate pools, visible inputs, and hidden simulated relevance labels under a shared temporal information boundary. The benchmark contains 24 simulated research users, 50 daily paper streams, 1,200 user-day episodes, 20,727 unique papers, and 497,448 episode-paper records. We additionally specify a blind human-evaluation protocol to validate alignment between automatic metrics and expert judgments. Experiments against five scientific recommendation baselines show that PaperFlow achieves the strongest oracle-based ranking, the highest behavioral alignment with simulated reading selections, and the best blind human-evaluation score.
GenProve: Learning to Generate Text with Fine-Grained Provenance
Jan 08, 2026Large language models (LLM) often hallucinate, and while adding citations is a common solution, it is frequently insufficient for accountability as users struggle to verify how a cited source supports a generated claim. Existing methods are typically coarse-grained and fail to distinguish between direct quotes and complex reasoning. In this paper, we introduce Generation-time Fine-grained Provenance, a task where models must generate fluent answers while simultaneously producing structured, sentence-level provenance triples. To enable this, we present ReFInE (Relation-aware Fine-grained Interpretability & Evidence), a dataset featuring expert verified annotations that distinguish between Quotation, Compression, and Inference. Building on ReFInE, we propose GenProve, a framework that combines Supervised Fine-Tuning (SFT) with Group Relative Policy Optimization (GRPO). By optimizing a composite reward for answer fidelity and provenance correctness, GenProve significantly outperforms 14 strong LLMs in joint evaluation. Crucially, our analysis uncovers a reasoning gap where models excel at surface-level quotation but struggle significantly with inference-based provenance, suggesting that verifiable reasoning remains a frontier challenge distinct from surface-level citation.
AnyAD: Unified Any-Modality Anomaly Detection in Incomplete Multi-Sequence MRI
Dec 24, 2025Reliable anomaly detection in brain MRI remains challenging due to the scarcity of annotated abnormal cases and the frequent absence of key imaging modalities in real clinical workflows. Existing single-class or multi-class anomaly detection (AD) models typically rely on fixed modality configurations, require repetitive training, or fail to generalize to unseen modality combinations, limiting their clinical scalability. In this work, we present a unified Any-Modality AD framework that performs robust anomaly detection and localization under arbitrary MRI modality availability. The framework integrates a dual-pathway DINOv2 encoder with a feature distribution alignment mechanism that statistically aligns incomplete-modality features with full-modality representations, enabling stable inference even with severe modality dropout. To further enhance semantic consistency, we introduce an Intrinsic Normal Prototypes (INPs) extractor and an INP-guided decoder that reconstruct only normal anatomical patterns while naturally amplifying abnormal deviations. Through randomized modality masking and indirect feature completion during training, the model learns to adapt to all modality configurations without re-training. Extensive experiments on BraTS2018, MU-Glioma-Post, and Pretreat-MetsToBrain-Masks demonstrate that our approach consistently surpasses state-of-the-art industrial and medical AD baselines across 7 modality combinations, achieving superior generalization. This study establishes a scalable paradigm for multimodal medical AD under real-world, imperfect modality conditions. Our source code is available at https://github.com/wuchangw/AnyAD.
Step-GUI Technical Report
Dec 19, 2025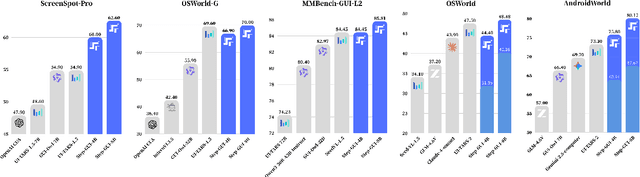
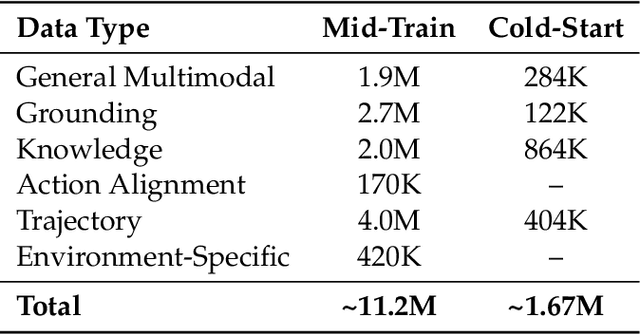
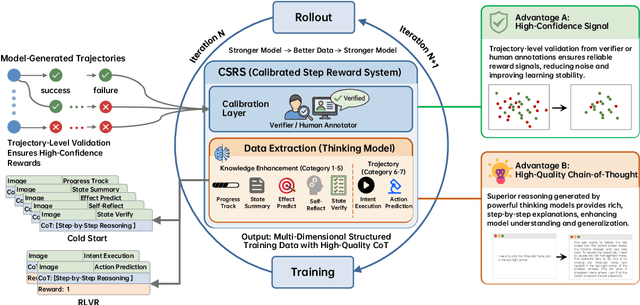
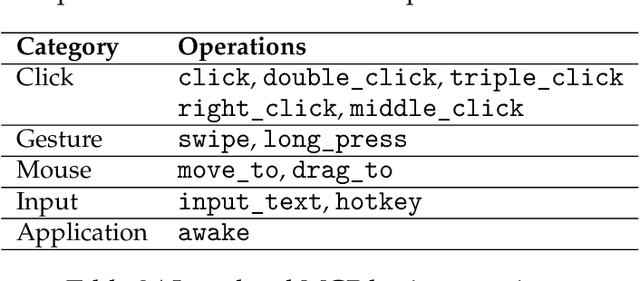
Recent advances in multimodal large language models unlock unprecedented opportunities for GUI automation. However, a fundamental challenge remains: how to efficiently acquire high-quality training data while maintaining annotation reliability? We introduce a self-evolving training pipeline powered by the Calibrated Step Reward System, which converts model-generated trajectories into reliable training signals through trajectory-level calibration, achieving >90% annotation accuracy with 10-100x lower cost. Leveraging this pipeline, we introduce Step-GUI, a family of models (4B/8B) that achieves state-of-the-art GUI performance (8B: 80.2% AndroidWorld, 48.5% OSWorld, 62.6% ScreenShot-Pro) while maintaining robust general capabilities. As GUI agent capabilities improve, practical deployment demands standardized interfaces across heterogeneous devices while protecting user privacy. To this end, we propose GUI-MCP, the first Model Context Protocol for GUI automation with hierarchical architecture that combines low-level atomic operations and high-level task delegation to local specialist models, enabling high-privacy execution where sensitive data stays on-device. Finally, to assess whether agents can handle authentic everyday usage, we introduce AndroidDaily, a benchmark grounded in real-world mobile usage patterns with 3146 static actions and 235 end-to-end tasks across high-frequency daily scenarios (8B: static 89.91%, end-to-end 52.50%). Our work advances the development of practical GUI agents and demonstrates strong potential for real-world deployment in everyday digital interactions.
ATLAS: A High-Difficulty, Multidisciplinary Benchmark for Frontier Scientific Reasoning
Nov 18, 2025The rapid advancement of Large Language Models (LLMs) has led to performance saturation on many established benchmarks, questioning their ability to distinguish frontier models. Concurrently, existing high-difficulty benchmarks often suffer from narrow disciplinary focus, oversimplified answer formats, and vulnerability to data contamination, creating a fidelity gap with real-world scientific inquiry. To address these challenges, we introduce ATLAS (AGI-Oriented Testbed for Logical Application in Science), a large-scale, high-difficulty, and cross-disciplinary evaluation suite composed of approximately 800 original problems. Developed by domain experts (PhD-level and above), ATLAS spans seven core scientific fields: mathematics, physics, chemistry, biology, computer science, earth science, and materials science. Its key features include: (1) High Originality and Contamination Resistance, with all questions newly created or substantially adapted to prevent test data leakage; (2) Cross-Disciplinary Focus, designed to assess models' ability to integrate knowledge and reason across scientific domains; (3) High-Fidelity Answers, prioritizing complex, open-ended answers involving multi-step reasoning and LaTeX-formatted expressions over simple multiple-choice questions; and (4) Rigorous Quality Control, employing a multi-stage process of expert peer review and adversarial testing to ensure question difficulty, scientific value, and correctness. We also propose a robust evaluation paradigm using a panel of LLM judges for automated, nuanced assessment of complex answers. Preliminary results on leading models demonstrate ATLAS's effectiveness in differentiating their advanced scientific reasoning capabilities. We plan to develop ATLAS into a long-term, open, community-driven platform to provide a reliable "ruler" for progress toward Artificial General Intelligence.
Towards Practical Alzheimer's Disease Diagnosis: A Lightweight and Interpretable Spiking Neural Model
Jun 11, 2025Early diagnosis of Alzheimer's Disease (AD), especially at the mild cognitive impairment (MCI) stage, is vital yet hindered by subjective assessments and the high cost of multimodal imaging modalities. Although deep learning methods offer automated alternatives, their energy inefficiency and computational demands limit real-world deployment, particularly in resource-constrained settings. As a brain-inspired paradigm, spiking neural networks (SNNs) are inherently well-suited for modeling the sparse, event-driven patterns of neural degeneration in AD, offering a promising foundation for interpretable and low-power medical diagnostics. However, existing SNNs often suffer from weak expressiveness and unstable training, which restrict their effectiveness in complex medical tasks. To address these limitations, we propose FasterSNN, a hybrid neural architecture that integrates biologically inspired LIF neurons with region-adaptive convolution and multi-scale spiking attention. This design enables sparse, efficient processing of 3D MRI while preserving diagnostic accuracy. Experiments on benchmark datasets demonstrate that FasterSNN achieves competitive performance with substantially improved efficiency and stability, supporting its potential for practical AD screening. Our source code is available at https://github.com/wuchangw/FasterSNN.
Extend the FFmpeg Framework to Analyze Media Content
Mar 05, 2021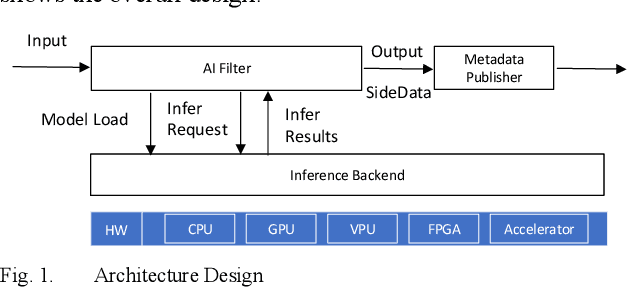
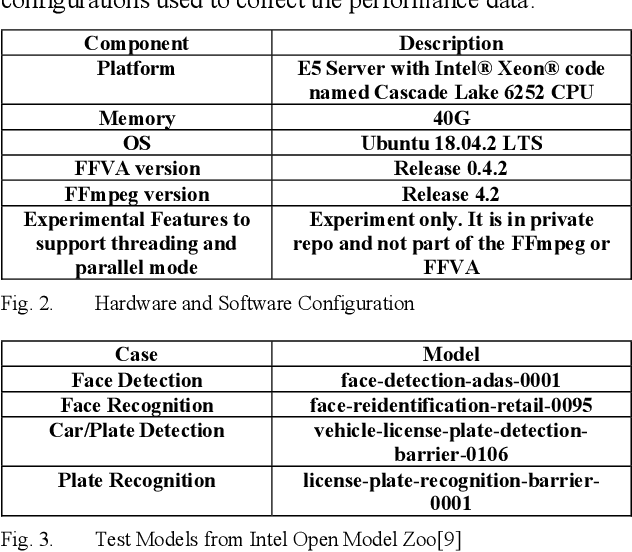
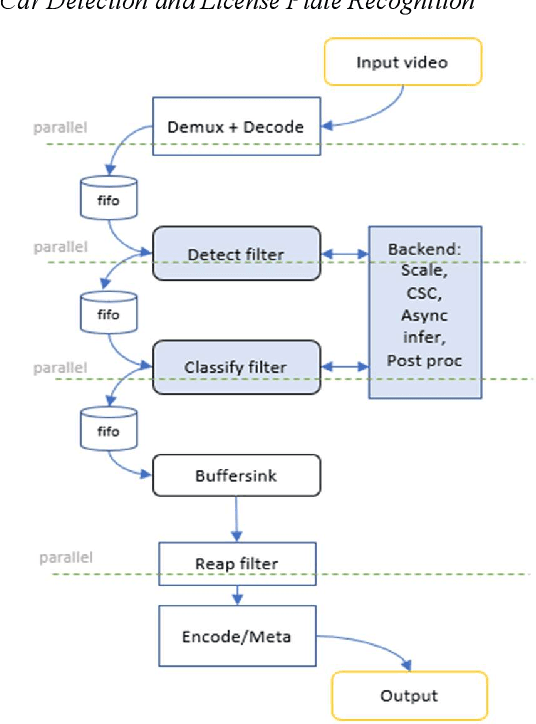
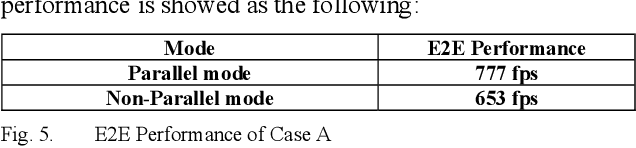
This paper introduces a new set of video analytics plugins developed for the FFmpeg framework. Multimedia applications that increasingly utilize the FFmpeg media features for its comprehensive media encoding, decoding, muxing, and demuxing capabilities can now additionally analyze the video content based on AI models. The plugins are thread optimized for best performance overcoming certain FFmpeg threading limitations. The plugins utilize the Intel OpenVINO Toolkit inference engine as the backend. The analytics workloads are accelerated on different platforms such as CPU, GPU, FPGA or specialized analytics accelerators. With our reference implementation, the feature of OpenVINO as inference backend has been pushed into FFmpeg mainstream repository. We plan to submit more patches later.
Silas: High Performance, Explainable and Verifiable Machine Learning
Oct 03, 2019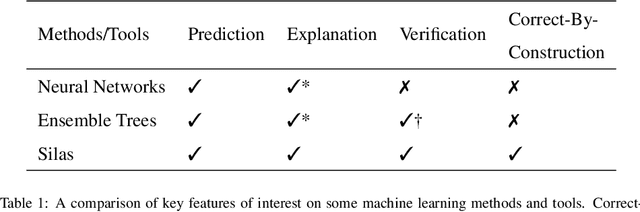
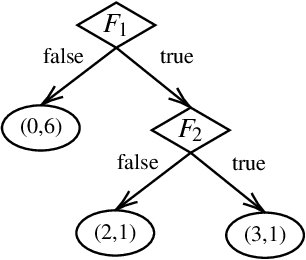
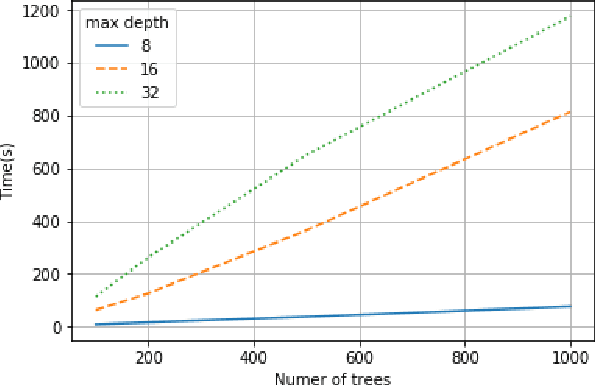
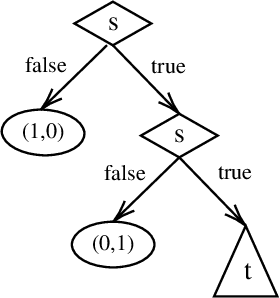
This paper introduces a new classification tool named Silas, which is built to provide a more transparent and dependable data analytics service. A focus of Silas is on providing a formal foundation of decision trees in order to support logical analysis and verification of learned prediction models. This paper describes the distinct features of Silas: The Model Audit module formally verifies the prediction model against user specifications, the Enforcement Learning module trains prediction models that are guaranteed correct, the Model Insight and Prediction Insight modules reason about the prediction model and explain the decision-making of predictions. We also discuss implementation details ranging from programming paradigm to memory management that help achieve high-performance computation.
Composite Adaptive Control for Bilateral Teleoperation Systems without Persistency of Excitation
Apr 18, 2018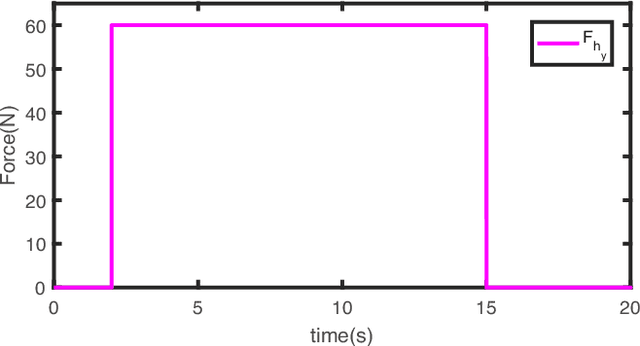
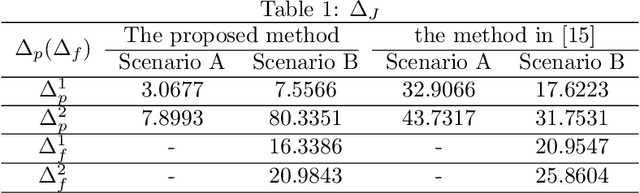
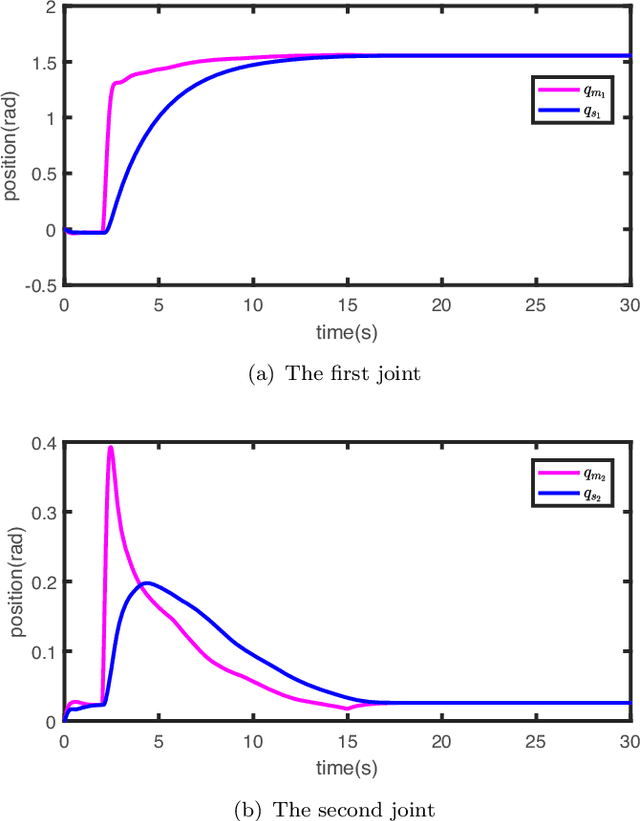
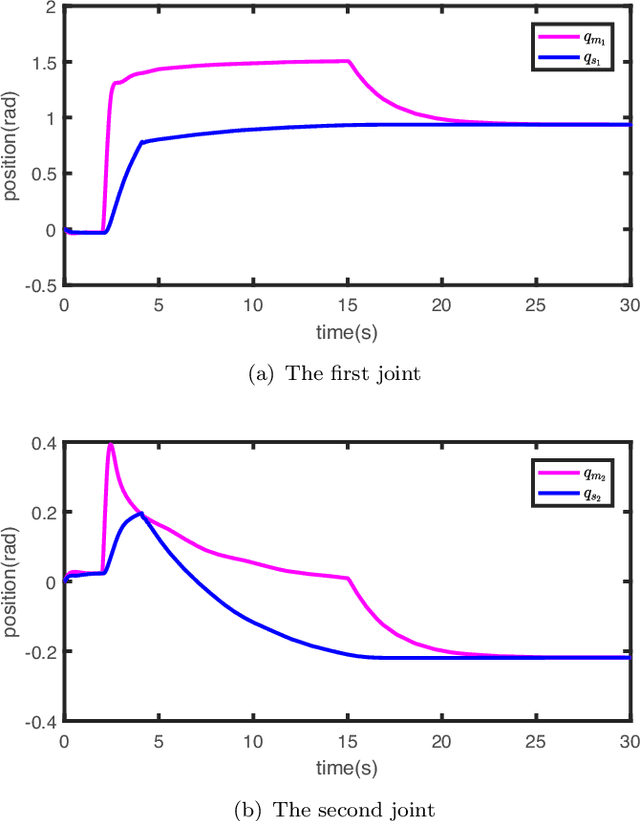
Composite adaptive control schemes, which use both the system tracking errors and the prediction error to drive the update laws, have become widespread in achieving an improvement of system performance. However, a strong persistent-excitation (PE) condition should be satisfied to guarantee the parameter convergence. This paper proposes a novel composite adaptive control to guarantee parameter convergence without PE condition for nonlinear teleoperation systems with dynamic uncertainties and time-varying communication delays. The stability criteria of the closed-loop teleoperation system are given in terms of linear matrix inequalities. New tracking performance measures are proposed to evaluate the position tracking between the master and the slave. Simulation studies are given to show the effectiveness of the proposed method.