 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Relation-Specific Representations for Few-shot Knowledge Graph Completion
Mar 22, 2022
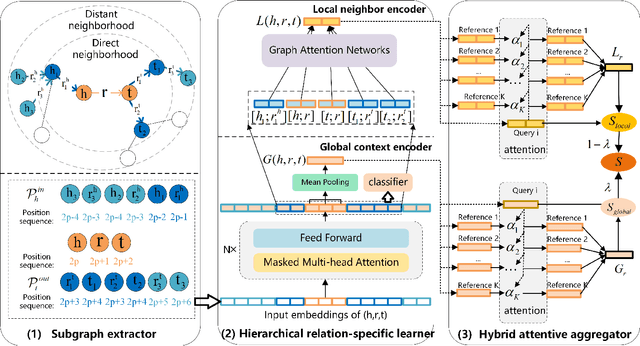

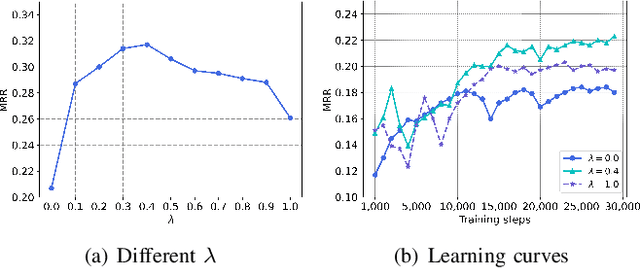
Recent years have witnessed increasing interest in few-shot knowledge graph completion (FKGC), which aims to infer unseen query triples for a few-shot relation using a handful of reference triples of the relation. The primary focus of existing FKGC methods lies in learning the relation representations that can reflect the common information shared by the query and reference triples. To this end, these methods learn the embeddings of entities with their direct neighbors, and use the concatenation of the entity embeddings as the relation representations. However, the entity embeddings learned only from direct neighborhoods may have low expressiveness when the entity has sparse neighbors or shares a common local neighborhood with other entities. Moreover, the embeddings of two entities are insufficient to represent the semantic information of their relationship, especially when they have multiple relations. To address these issues, we propose a Relation-Specific Context Learning (RSCL) framework, which exploits graph contexts of triples to capture the semantic information of relations and entities simultaneously. Specifically, we first extract graph contexts for each triple, which can provide long-term entity-relation dependencies. To model the graph contexts, we then develop a hierarchical relation-specific learner to learn global and local relation-specific representations for relations by capturing contextualized information of triples and incorporating local information of entities. Finally, we utilize the learned representations to predict the likelihood of the query triples. Experimental results on two public datasets demonstrate that RSCL outperforms state-of-the-art FKGC methods.
Applying Convolutional Neural Networks to Data on Unstructured Meshes with Space-Filling Curves
Nov 24, 2020



This paper presents the first classical Convolutional Neural Network (CNN) that can be applied directly to data from unstructured finite element meshes or control volume grids. CNNs have been hugely influential in the areas of image classification and image compression, both of which typically deal with data on structured grids. Unstructured meshes are frequently used to solve partial differential equations and are particularly suitable for problems that require the mesh to conform to complex geometries or for problems that require variable mesh resolution. Central to the approach are space-filling curves, which traverse the nodes or cells of a mesh tracing out a path that is as short as possible (in terms of numbers of edges) and that visits each node or cell exactly once. The space-filling curves (SFCs) are used to find an ordering of the nodes or cells that can transform multi-dimensional solutions on unstructured meshes into a one-dimensional (1D) representation, to which 1D convolutional layers can then be applied. Although developed in two dimensions, the approach is applicable to higher dimensional problems. To demonstrate the approach, the network we choose is a convolutional autoencoder (CAE) although other types of CNN could be used. The approach is tested by applying CAEs to data sets that have been reordered with an SFC. Sparse layers are used at the input and output of the autoencoder, and the use of multiple SFCs is explored. We compare the accuracy of the SFC-based CAE with that of a classical CAE applied to two idealised problems on structured meshes, and then apply the approach to solutions of flow past a cylinder obtained using the finite-element method and an unstructured mesh.
Composite Adaptive Control for Bilateral Teleoperation Systems without Persistency of Excitation
Apr 18, 2018
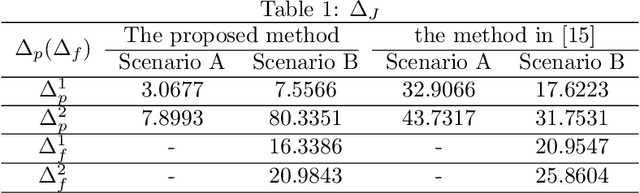
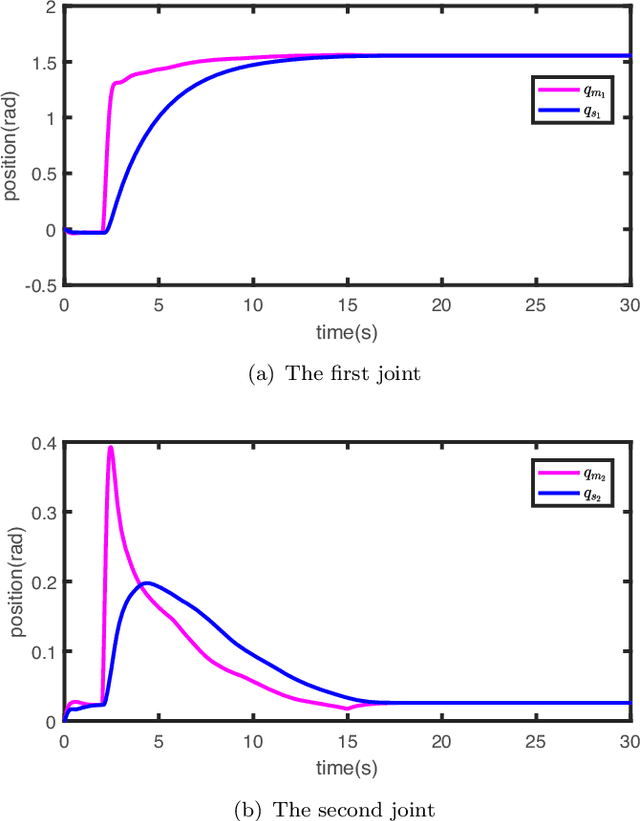
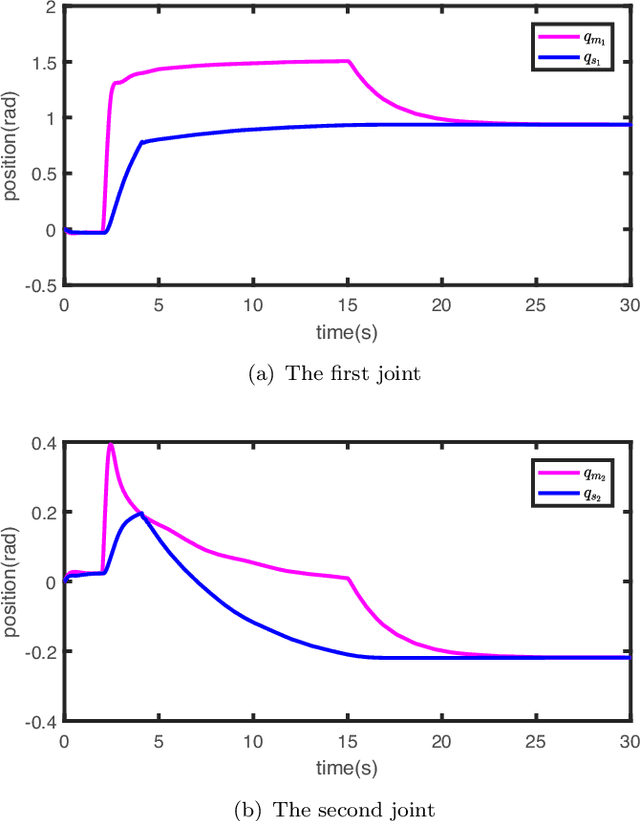
Composite adaptive control schemes, which use both the system tracking errors and the prediction error to drive the update laws, have become widespread in achieving an improvement of system performance. However, a strong persistent-excitation (PE) condition should be satisfied to guarantee the parameter convergence. This paper proposes a novel composite adaptive control to guarantee parameter convergence without PE condition for nonlinear teleoperation systems with dynamic uncertainties and time-varying communication delays. The stability criteria of the closed-loop teleoperation system are given in terms of linear matrix inequalities. New tracking performance measures are proposed to evaluate the position tracking between the master and the slave. Simulation studies are given to show the effectiveness of the proposed method.