 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Positional Encoding for Neural Vehicle Routing
May 12, 2026Transformer-based models have become the dominant paradigm for neural combinatorial optimization (NCO) of vehicle routing problems (VRPs), yet the role of positional encoding (PE) in these architectures remains largely unexplored. Unlike natural language, where tokens are uniformly spaced on a line, routing solutions exhibit several properties that render standard NLP positional encodings inadequate. In this work, we formalize three such structural properties that a routing-aware PE should respect, namely anisometric node distances, cyclic and direction-aware topology, and hierarchical depot-anchored global multi-route structure, combining them with a unifying design principle of geometric grounding. Guided by these criteria, we analyze and compare PE methods spanning NLP, graph-transformer, and routing-specific families, and propose a hierarchical anisometric PE that combines a distance-indexed, circularly consistent in-route encoding with a depot-anchored angular cross-route encoding. Extensive experiments across diverse VRP variants demonstrate that geometry-grounded PE consistently outperforms index-based alternatives, with gains that transfer across problem variants, model architectures, and distribution shifts.
Arc Routing Problems with Multiple Trucks and Drones: A Hybrid Genetic Algorithm
Aug 25, 2025Arc-routing problems underpin numerous critical field operations, including power-line inspection, urban police patrolling, and traffic monitoring. In this domain, the Rural Postman Problem (RPP) is a fundamental variant in which a prescribed subset of edges or arcs in a network must be traversed. This paper investigates a generalized form of the RPP, called RPP-mTD, which involves a fleet of multiple trucks, each carrying multiple drones. The trucks act as mobile depots traversing a road network, from which drones are launched to execute simultaneous service, with the objective of minimizing the overall makespan. Given the combinatorial complexity of RPP-mTD, we propose a Hybrid Genetic Algorithm (HGA) that combines population-based exploration with targeted neighborhood searches. Solutions are encoded using a two-layer chromosome that represents: (i) an ordered, directed sequence of required edges, and (ii) their assignment to vehicles. A tailored segment-preserving crossover operator is introduced, along with multiple local search techniques to intensify the optimization. We benchmark the proposed HGA against established single truck-and-drone instances, demonstrating competitive performance. Additionally, we conduct extensive evaluations on new, larger-scale instances to demonstrate scalability. Our findings highlight the operational benefits of closely integrated truck-drone fleets, affirming the HGA's practical effectiveness as a decision-support tool in advanced mixed-fleet logistics.
USPR: Learning a Unified Solver for Profiled Routing
May 08, 2025The Profiled Vehicle Routing Problem (PVRP) extends the classical VRP by incorporating vehicle-client-specific preferences and constraints, reflecting real-world requirements such as zone restrictions and service-level preferences. While recent reinforcement learning (RL) solvers have shown promise, they require retraining for each new profile distribution, suffer from poor representation ability, and struggle to generalize to out-of-distribution instances. In this paper, we address these limitations by introducing USPR (Unified Solver for Profiled Routing), a novel framework that natively handles arbitrary profile types. USPR introduces three key innovations: (i) Profile Embeddings (PE) to encode any combination of profile types; (ii) Multi-Head Profiled Attention (MHPA), an attention mechanism that models rich interactions between vehicles and clients; (iii) Profile-aware Score Reshaping (PSR), which dynamically adjusts decoder logits using profile scores to improve generalization. Empirical results on diverse PVRP benchmarks demonstrate that USPR achieves state-of-the-art results among learning-based methods while offering significant gains in flexibility and computational efficiency. We make our source code publicly available to foster future research at https://github.com/ai4co/uspr.
The Iterative Chainlet Partitioning Algorithm for the Traveling Salesman Problem with Drone and Neural Acceleration
Apr 21, 2025This study introduces the Iterative Chainlet Partitioning (ICP) algorithm and its neural acceleration for solving the Traveling Salesman Problem with Drone (TSP-D). The proposed ICP algorithm decomposes a TSP-D solution into smaller segments called chainlets, each optimized individually by a dynamic programming subroutine. The chainlet with the highest improvement is updated and the procedure is repeated until no further improvement is possible. The number of subroutine calls is bounded linearly in problem size for the first iteration and remains constant in subsequent iterations, ensuring algorithmic scalability. Empirical results show that ICP outperforms existing algorithms in both solution quality and computational time. Tested over 1,059 benchmark instances, ICP yields an average improvement of 2.75% in solution quality over the previous state-of-the-art algorithm while reducing computational time by 79.8%. The procedure is deterministic, ensuring reliability without requiring multiple runs. The subroutine is the computational bottleneck in the already efficient ICP algorithm. To reduce the necessity of subroutine calls, we integrate a graph neural network (GNN) to predict incremental improvements. We demonstrate that the resulting Neuro ICP (NICP) achieves substantial acceleration while maintaining solution quality. Compared to ICP, NICP reduces the total computational time by 49.7%, while the objective function value increase is limited to 0.12%. The framework's adaptability to various operational constraints makes it a valuable foundation for developing efficient algorithms for truck-drone synchronized routing problems.
Neural Combinatorial Optimization for Real-World Routing
Mar 20, 2025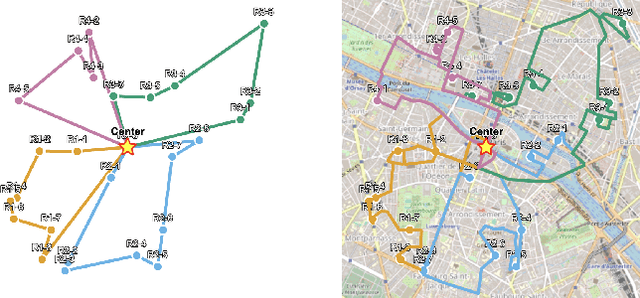



Vehicle Routing Problems (VRPs) are a class of NP-hard problems ubiquitous in several real-world logistics scenarios that pose significant challenges for optimization. Neural Combinatorial Optimization (NCO) has emerged as a promising alternative to classical approaches, as it can learn fast heuristics to solve VRPs. However, most research works in NCO for VRPs focus on simplified settings, which do not account for asymmetric distances and travel durations that cannot be derived by simple Euclidean distances and unrealistic data distributions, hindering real-world deployment. This work introduces RRNCO (Real Routing NCO) to bridge the gap of NCO between synthetic and real-world VRPs in the critical aspects of both data and modeling. First, we introduce a new, openly available dataset with real-world data containing a diverse dataset of locations, distances, and duration matrices from 100 cities, considering realistic settings with actual routing distances and durations obtained from Open Source Routing Machine (OSRM). Second, we propose a novel approach that efficiently processes both node and edge features through contextual gating, enabling the construction of more informed node embedding, and we finally incorporate an Adaptation Attention Free Module (AAFM) with neural adaptive bias mechanisms that effectively integrates not only distance matrices but also angular relationships between nodes, allowing our model to capture rich structural information. RRNCO achieves state-of-the-art results in real-world VRPs among NCO methods. We make our dataset and code publicly available at https://github.com/ai4co/real-routing-nco.
CAMP: Collaborative Attention Model with Profiles for Vehicle Routing Problems
Jan 06, 2025The profiled vehicle routing problem (PVRP) is a generalization of the heterogeneous capacitated vehicle routing problem (HCVRP) in which the objective is to optimize the routes of vehicles to serve client demands subject to different vehicle profiles, with each having a preference or constraint on a per-client basis. While existing learning methods have shown promise for solving the HCVRP in real-time, no learning method exists to solve the more practical and challenging PVRP. In this paper, we propose a Collaborative Attention Model with Profiles (CAMP), a novel approach that learns efficient solvers for PVRP using multi-agent reinforcement learning. CAMP employs a specialized attention-based encoder architecture to embed profiled client embeddings in parallel for each vehicle profile. We design a communication layer between agents for collaborative decision-making across profiled embeddings at each decoding step and a batched pointer mechanism to attend to the profiled embeddings to evaluate the likelihood of the next actions. We evaluate CAMP on two variants of PVRPs: PVRP with preferences, which explicitly influence the reward function, and PVRP with zone constraints with different numbers of agents and clients, demonstrating that our learned solvers achieve competitive results compared to both classical state-of-the-art neural multi-agent models in terms of solution quality and computational efficiency. We make our code openly available at https://github.com/ai4co/camp.
PARCO: Learning Parallel Autoregressive Policies for Efficient Multi-Agent Combinatorial Optimization
Sep 05, 2024



Multi-agent combinatorial optimization problems such as routing and scheduling have great practical relevance but present challenges due to their NP-hard combinatorial nature, hard constraints on the number of possible agents, and hard-to-optimize objective functions. This paper introduces PARCO (Parallel AutoRegressive Combinatorial Optimization), a novel approach that learns fast surrogate solvers for multi-agent combinatorial problems with reinforcement learning by employing parallel autoregressive decoding. We propose a model with a Multiple Pointer Mechanism to efficiently decode multiple decisions simultaneously by different agents, enhanced by a Priority-based Conflict Handling scheme. Moreover, we design specialized Communication Layers that enable effective agent collaboration, thus enriching decision-making. We evaluate PARCO in representative multi-agent combinatorial problems in routing and scheduling and demonstrate that our learned solvers offer competitive results against both classical and neural baselines in terms of both solution quality and speed. We make our code openly available at https://github.com/ai4co/parco.
Genetic Algorithms with Neural Cost Predictor for Solving Hierarchical Vehicle Routing Problems
Oct 22, 2023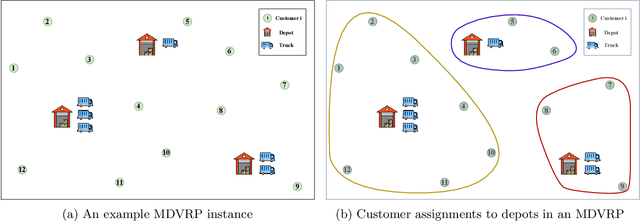
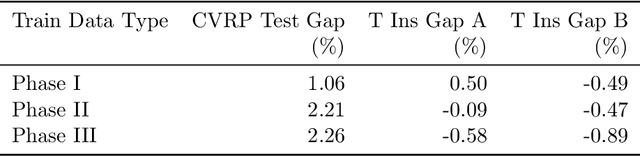
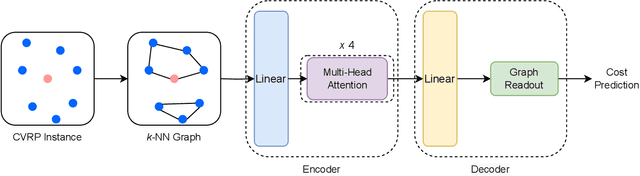
When vehicle routing decisions are intertwined with higher-level decisions, the resulting optimization problems pose significant challenges for computation. Examples are the multi-depot vehicle routing problem (MDVRP), where customers are assigned to depots before delivery, and the capacitated location routing problem (CLRP), where the locations of depots should be determined first. A simple and straightforward approach for such hierarchical problems would be to separate the higher-level decisions from the complicated vehicle routing decisions. For each higher-level decision candidate, we may evaluate the underlying vehicle routing problems to assess the candidate. As this approach requires solving vehicle routing problems multiple times, it has been regarded as impractical in most cases. We propose a novel deep-learning-based approach called Genetic Algorithm with Neural Cost Predictor (GANCP) to tackle the challenge and simplify algorithm developments. For each higher-level decision candidate, we predict the objective function values of the underlying vehicle routing problems using a pre-trained graph neural network without actually solving the routing problems. In particular, our proposed neural network learns the objective values of the HGS-CVRP open-source package that solves capacitated vehicle routing problems. Our numerical experiments show that this simplified approach is effective and efficient in generating high-quality solutions for both MDVRP and CLRP and has the potential to expedite algorithm developments for complicated hierarchical problems. We provide computational results evaluated in the standard benchmark instances used in the literature.
A Hybrid Genetic Algorithm for the min-max Multiple Traveling Salesman Problem
Jul 14, 2023This paper proposes a hybrid genetic algorithm for solving the Multiple Traveling Salesman Problem (mTSP) to minimize the length of the longest tour. The genetic algorithm utilizes a TSP sequence as the representation of each individual, and a dynamic programming algorithm is employed to evaluate the individual and find the optimal mTSP solution for the given sequence of cities. A novel crossover operator is designed to combine similar tours from two parents and offers great diversity for the population. For some of the generated offspring, we detect and remove intersections between tours to obtain a solution with no intersections. This is particularly useful for the min-max mTSP. The generated offspring are also improved by a self-adaptive random local search and a thorough neighborhood search. Our algorithm outperforms all existing algorithms on average, with similar cutoff time thresholds, when tested against multiple benchmark sets found in the literature. Additionally, we improve the best-known solutions for 21 out of 89 instances on four benchmark sets.
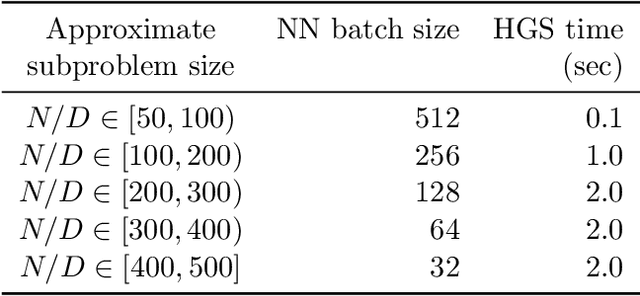
A Neural Separation Algorithm for the Rounded Capacity Inequalities
Jun 29, 2023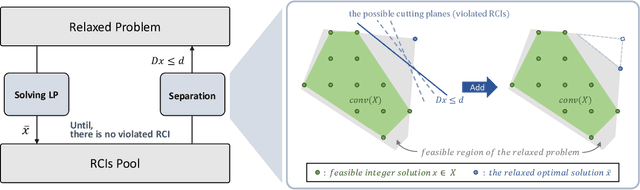
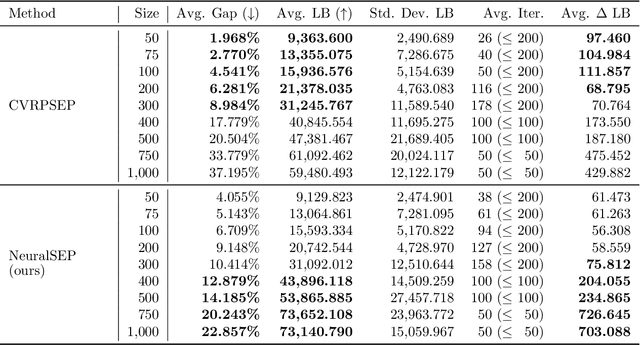
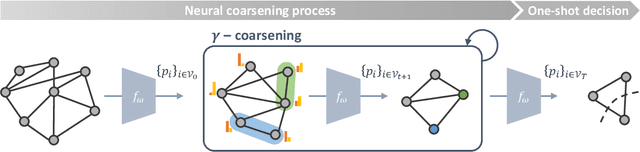
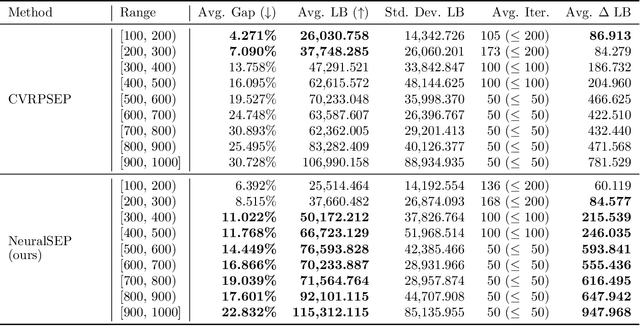
The cutting plane method is a key technique for successful branch-and-cut and branch-price-and-cut algorithms that find the exact optimal solutions for various vehicle routing problems (VRPs). Among various cuts, the rounded capacity inequalities (RCIs) are the most fundamental. To generate RCIs, we need to solve the separation problem, whose exact solution takes a long time to obtain; therefore, heuristic methods are widely used. We design a learning-based separation heuristic algorithm with graph coarsening that learns the solutions of the exact separation problem with a graph neural network (GNN), which is trained with small instances of 50 to 100 customers. We embed our separation algorithm within the cutting plane method to find a lower bound for the capacitated VRP (CVRP) with up to 1,000 customers. We compare the performance of our approach with CVRPSEP, a popular separation software package for various cuts used in solving VRPs. Our computational results show that our approach finds better lower bounds than CVRPSEP for large-scale problems with 400 or more customers, while CVRPSEP shows strong competency for problems with less than 400 customers.