 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJudgeFlow: Agentic Workflow Optimization via Block Judge
Jan 12, 2026Optimizing LLM-based agentic workflows is challenging for scaling AI capabilities. Current methods rely on coarse, end-to-end evaluation signals and lack fine-grained signals on where to refine, often resulting in inefficient or low-impact modifications. To address these limitations, we propose {\our{}}, an Evaluation-Judge-Optimization-Update pipeline. We incorporate reusable, configurable logic blocks into agentic workflows to capture fundamental forms of logic. On top of this abstraction, we design a dedicated Judge module that inspects execution traces -- particularly failed runs -- and assigns rank-based responsibility scores to problematic blocks. These fine-grained diagnostic signals are then leveraged by an LLM-based optimizer, which focuses modifications on the most problematic block in the workflow. Our approach improves sample efficiency, enhances interpretability through block-level diagnostics, and provides a scalable foundation for automating increasingly complex agentic workflows. We evaluate {\our{}} on mathematical reasoning and code generation benchmarks, where {\our{}} achieves superior performance and efficiency compared to existing methods. The source code is publicly available at https://github.com/ma-zihan/JudgeFlow.
TrajEvo: Trajectory Prediction Heuristics Design via LLM-driven Evolution
Aug 07, 2025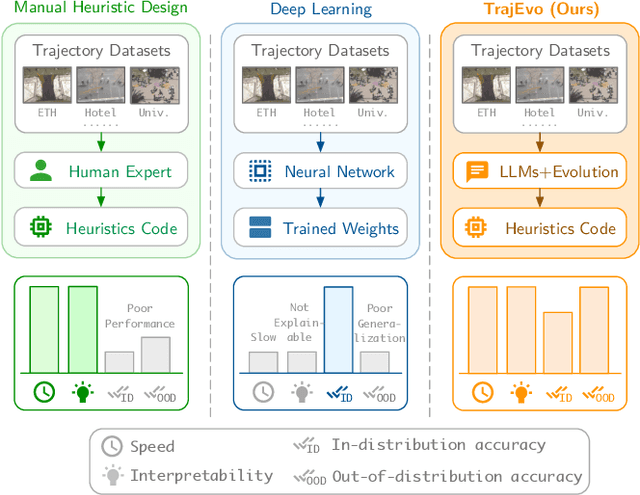
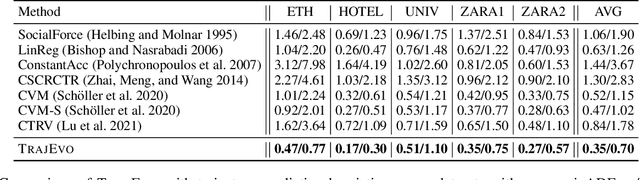
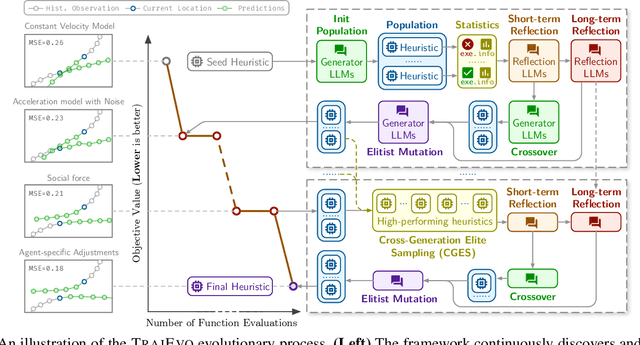
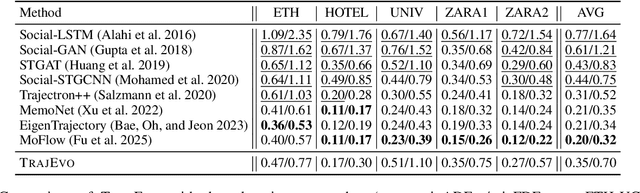
Trajectory prediction is a critical task in modeling human behavior, especially in safety-critical domains such as social robotics and autonomous vehicle navigation. Traditional heuristics based on handcrafted rules often lack accuracy and generalizability. Although deep learning approaches offer improved performance, they typically suffer from high computational cost, limited explainability, and, importantly, poor generalization to out-of-distribution (OOD) scenarios. In this paper, we introduce TrajEvo, a framework that leverages Large Language Models (LLMs) to automatically design trajectory prediction heuristics. TrajEvo employs an evolutionary algorithm to generate and refine prediction heuristics from past trajectory data. We propose two key innovations: Cross-Generation Elite Sampling to encourage population diversity, and a Statistics Feedback Loop that enables the LLM to analyze and improve alternative predictions. Our evaluations demonstrate that TrajEvo outperforms existing heuristic methods across multiple real-world datasets, and notably surpasses both heuristic and deep learning methods in generalizing to an unseen OOD real-world dataset. TrajEvo marks a promising step toward the automated design of fast, explainable, and generalizable trajectory prediction heuristics. We release our source code to facilitate future research at https://github.com/ai4co/trajevo.
USPR: Learning a Unified Solver for Profiled Routing
May 08, 2025The Profiled Vehicle Routing Problem (PVRP) extends the classical VRP by incorporating vehicle-client-specific preferences and constraints, reflecting real-world requirements such as zone restrictions and service-level preferences. While recent reinforcement learning (RL) solvers have shown promise, they require retraining for each new profile distribution, suffer from poor representation ability, and struggle to generalize to out-of-distribution instances. In this paper, we address these limitations by introducing USPR (Unified Solver for Profiled Routing), a novel framework that natively handles arbitrary profile types. USPR introduces three key innovations: (i) Profile Embeddings (PE) to encode any combination of profile types; (ii) Multi-Head Profiled Attention (MHPA), an attention mechanism that models rich interactions between vehicles and clients; (iii) Profile-aware Score Reshaping (PSR), which dynamically adjusts decoder logits using profile scores to improve generalization. Empirical results on diverse PVRP benchmarks demonstrate that USPR achieves state-of-the-art results among learning-based methods while offering significant gains in flexibility and computational efficiency. We make our source code publicly available to foster future research at https://github.com/ai4co/uspr.
TrajEvo: Designing Trajectory Prediction Heuristics via LLM-driven Evolution
May 07, 2025



Trajectory prediction is a crucial task in modeling human behavior, especially in fields as social robotics and autonomous vehicle navigation. Traditional heuristics based on handcrafted rules often lack accuracy, while recently proposed deep learning approaches suffer from computational cost, lack of explainability, and generalization issues that limit their practical adoption. In this paper, we introduce TrajEvo, a framework that leverages Large Language Models (LLMs) to automatically design trajectory prediction heuristics. TrajEvo employs an evolutionary algorithm to generate and refine prediction heuristics from past trajectory data. We introduce a Cross-Generation Elite Sampling to promote population diversity and a Statistics Feedback Loop allowing the LLM to analyze alternative predictions. Our evaluations show TrajEvo outperforms previous heuristic methods on the ETH-UCY datasets, and remarkably outperforms both heuristics and deep learning methods when generalizing to the unseen SDD dataset. TrajEvo represents a first step toward automated design of fast, explainable, and generalizable trajectory prediction heuristics. We make our source code publicly available to foster future research at https://github.com/ai4co/trajevo.
Neural Combinatorial Optimization for Real-World Routing
Mar 20, 2025



Vehicle Routing Problems (VRPs) are a class of NP-hard problems ubiquitous in several real-world logistics scenarios that pose significant challenges for optimization. Neural Combinatorial Optimization (NCO) has emerged as a promising alternative to classical approaches, as it can learn fast heuristics to solve VRPs. However, most research works in NCO for VRPs focus on simplified settings, which do not account for asymmetric distances and travel durations that cannot be derived by simple Euclidean distances and unrealistic data distributions, hindering real-world deployment. This work introduces RRNCO (Real Routing NCO) to bridge the gap of NCO between synthetic and real-world VRPs in the critical aspects of both data and modeling. First, we introduce a new, openly available dataset with real-world data containing a diverse dataset of locations, distances, and duration matrices from 100 cities, considering realistic settings with actual routing distances and durations obtained from Open Source Routing Machine (OSRM). Second, we propose a novel approach that efficiently processes both node and edge features through contextual gating, enabling the construction of more informed node embedding, and we finally incorporate an Adaptation Attention Free Module (AAFM) with neural adaptive bias mechanisms that effectively integrates not only distance matrices but also angular relationships between nodes, allowing our model to capture rich structural information. RRNCO achieves state-of-the-art results in real-world VRPs among NCO methods. We make our dataset and code publicly available at https://github.com/ai4co/real-routing-nco.
Highly Efficient Human Action Recognition with Quantum Genetic Algorithm Optimized Support Vector Machine
Dec 15, 2017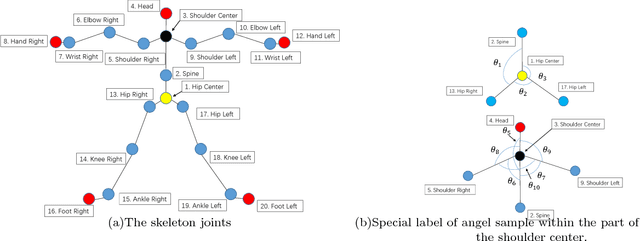
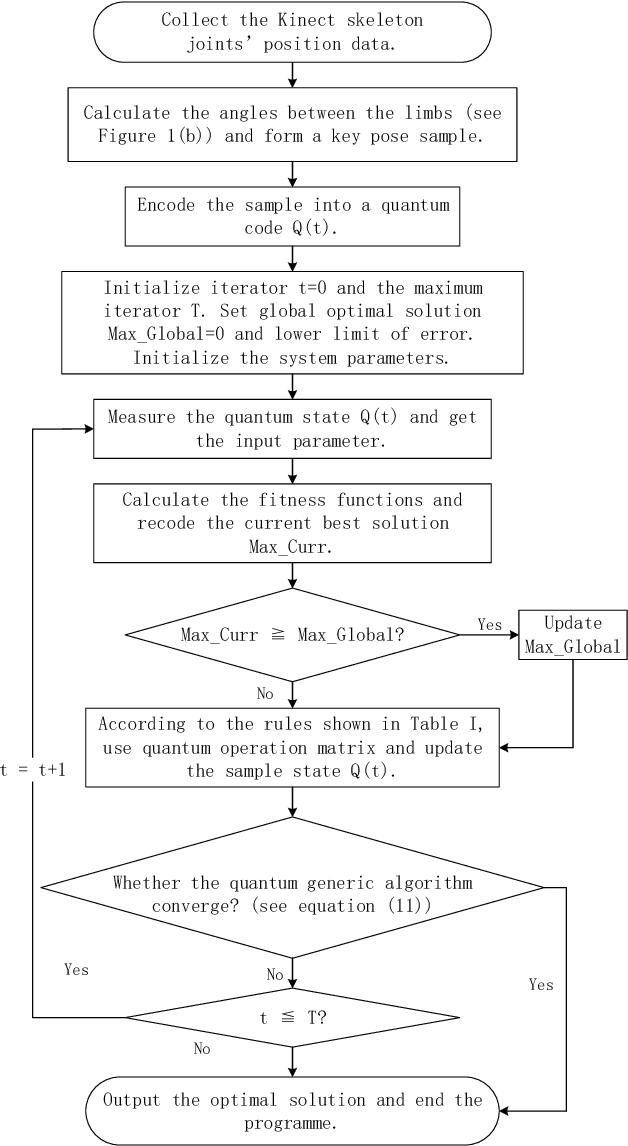
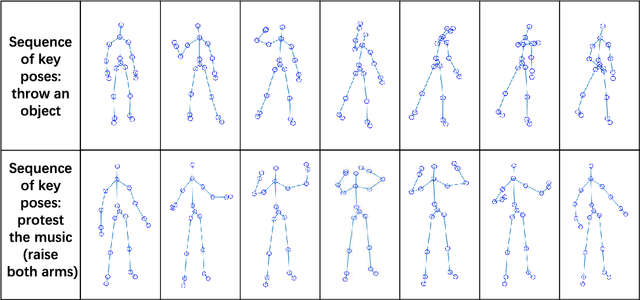
In this paper we propose the use of quantum genetic algorithm to optimize the support vector machine (SVM) for human action recognition. The Microsoft Kinect sensor can be used for skeleton tracking, which provides the joints' position data. However, how to extract the motion features for representing the dynamics of a human skeleton is still a challenge due to the complexity of human motion. We present a highly efficient features extraction method for action classification, that is, using the joint angles to represent a human skeleton and calculating the variance of each angle during an action time window. Using the proposed representation, we compared the human action classification accuracy of two approaches, including the optimized SVM based on quantum genetic algorithm and the conventional SVM with grid search. Experimental results on the MSR-12 dataset show that the conventional SVM achieved an accuracy of $ 93.85\% $. The proposed approach outperforms the conventional method with an accuracy of $ 96.15\% $.