 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBLUE: Toward Better Language Use in Efficient Vision-Language-Action Models for Autonomous Driving
Jun 07, 2026We present BLUE, a minimal method for better language use in vision-language-action (VLA) models for autonomous driving (AD). Through extensive analysis, we reveal that language matters on only a small fraction of routes, but on those routes it can greatly improve or degrade performance. Generating language at every frame is therefore inefficient, since most computation is spent on frames that do not benefit from language. We further show that pretrained VLA hidden states potentially already encode whether language will benefit a given frame, even though scene complexity and kinematic features alone struggle to predict this. Based on this finding, BLUE trains a lightweight gate on frozen VLA hidden states to decide per frame whether to activate language generation or predict actions directly, without modifying the backbone or requiring additional human annotation. With just a 0.11M-parameter gate, BLUE sets a new state of the art on both benchmarks, achieving 76.2% success rate on Bench2Drive and 36 driving score on Longest6 v2, while delivering 2.54x inference speedup and 8.9% success rate improvement over the backbone. BLUE provides a practical path toward efficient language-augmented AD, showing that VLA models can retain the benefits of language at a fraction of the cost. Our code, data, logs and checkpoints are fully available on https://github.com/George-Ling3/BLUE.
GaussianDWM: 3D Gaussian Driving World Model for Unified Scene Understanding and Multi-Modal Generation
Dec 29, 2025Driving World Models (DWMs) have been developing rapidly with the advances of generative models. However, existing DWMs lack 3D scene understanding capabilities and can only generate content conditioned on input data, without the ability to interpret or reason about the driving environment. Moreover, current approaches represent 3D spatial information with point cloud or BEV features do not accurately align textual information with the underlying 3D scene. To address these limitations, we propose a novel unified DWM framework based on 3D Gaussian scene representation, which enables both 3D scene understanding and multi-modal scene generation, while also enabling contextual enrichment for understanding and generation tasks. Our approach directly aligns textual information with the 3D scene by embedding rich linguistic features into each Gaussian primitive, thereby achieving early modality alignment. In addition, we design a novel task-aware language-guided sampling strategy that removes redundant 3D Gaussians and injects accurate and compact 3D tokens into LLM. Furthermore, we design a dual-condition multi-modal generation model, where the information captured by our vision-language model is leveraged as a high-level language condition in combination with a low-level image condition, jointly guiding the multi-modal generation process. We conduct comprehensive studies on the nuScenes, and NuInteract datasets to validate the effectiveness of our framework. Our method achieves state-of-the-art performance. We will release the code publicly on GitHub https://github.com/dtc111111/GaussianDWM.
ImagebindDC: Compressing Multi-modal Data with Imagebind-based Condensation
Nov 11, 2025



Data condensation techniques aim to synthesize a compact dataset from a larger one to enable efficient model training, yet while successful in unimodal settings, they often fail in multimodal scenarios where preserving intricate inter-modal dependencies is crucial. To address this, we introduce ImageBindDC, a novel data condensation framework operating within the unified feature space of ImageBind. Our approach moves beyond conventional distribution-matching by employing a powerful Characteristic Function (CF) loss, which operates in the Fourier domain to facilitate a more precise statistical alignment via exact infinite moment matching. We design our objective to enforce three critical levels of distributional consistency: (i) uni-modal alignment, which matches the statistical properties of synthetic and real data within each modality; (ii) cross-modal alignment, which preserves pairwise semantics by matching the distributions of hybrid real-synthetic data pairs; and (iii) joint-modal alignment, which captures the complete multivariate data structure by aligning the joint distribution of real data pairs with their synthetic counterparts. Extensive experiments highlight the effectiveness of ImageBindDC: on the NYU-v2 dataset, a model trained on just 5 condensed datapoints per class achieves lossless performance comparable to one trained on the full dataset, achieving a new state-of-the-art with an 8.2\% absolute improvement over the previous best method and more than 4$\times$ less condensation time.
An Egocentric Vision-Language Model based Portable Real-time Smart Assistant
Mar 06, 2025We present Vinci, a vision-language system designed to provide real-time, comprehensive AI assistance on portable devices. At its core, Vinci leverages EgoVideo-VL, a novel model that integrates an egocentric vision foundation model with a large language model (LLM), enabling advanced functionalities such as scene understanding, temporal grounding, video summarization, and future planning. To enhance its utility, Vinci incorporates a memory module for processing long video streams in real time while retaining contextual history, a generation module for producing visual action demonstrations, and a retrieval module that bridges egocentric and third-person perspectives to provide relevant how-to videos for skill acquisition. Unlike existing systems that often depend on specialized hardware, Vinci is hardware-agnostic, supporting deployment across a wide range of devices, including smartphones and wearable cameras. In our experiments, we first demonstrate the superior performance of EgoVideo-VL on multiple public benchmarks, showcasing its vision-language reasoning and contextual understanding capabilities. We then conduct a series of user studies to evaluate the real-world effectiveness of Vinci, highlighting its adaptability and usability in diverse scenarios. We hope Vinci can establish a new framework for portable, real-time egocentric AI systems, empowering users with contextual and actionable insights. Including the frontend, backend, and models, all codes of Vinci are available at https://github.com/OpenGVLab/vinci.
Modeling Fine-Grained Hand-Object Dynamics for Egocentric Video Representation Learning
Mar 02, 2025



In egocentric video understanding, the motion of hands and objects as well as their interactions play a significant role by nature. However, existing egocentric video representation learning methods mainly focus on aligning video representation with high-level narrations, overlooking the intricate dynamics between hands and objects. In this work, we aim to integrate the modeling of fine-grained hand-object dynamics into the video representation learning process. Since no suitable data is available, we introduce HOD, a novel pipeline employing a hand-object detector and a large language model to generate high-quality narrations with detailed descriptions of hand-object dynamics. To learn these fine-grained dynamics, we propose EgoVideo, a model with a new lightweight motion adapter to capture fine-grained hand-object motion information. Through our co-training strategy, EgoVideo effectively and efficiently leverages the fine-grained hand-object dynamics in the HOD data. Extensive experiments demonstrate that our method achieves state-of-the-art performance across multiple egocentric downstream tasks, including improvements of 6.3% in EK-100 multi-instance retrieval, 5.7% in EK-100 classification, and 16.3% in EGTEA classification in zero-shot settings. Furthermore, our model exhibits robust generalization capabilities in hand-object interaction and robot manipulation tasks. Code and data are available at https://github.com/OpenRobotLab/EgoHOD/.
Vinci: A Real-time Embodied Smart Assistant based on Egocentric Vision-Language Model
Dec 30, 2024



We introduce Vinci, a real-time embodied smart assistant built upon an egocentric vision-language model. Designed for deployment on portable devices such as smartphones and wearable cameras, Vinci operates in an "always on" mode, continuously observing the environment to deliver seamless interaction and assistance. Users can wake up the system and engage in natural conversations to ask questions or seek assistance, with responses delivered through audio for hands-free convenience. With its ability to process long video streams in real-time, Vinci can answer user queries about current observations and historical context while also providing task planning based on past interactions. To further enhance usability, Vinci integrates a video generation module that creates step-by-step visual demonstrations for tasks that require detailed guidance. We hope that Vinci can establish a robust framework for portable, real-time egocentric AI systems, empowering users with contextual and actionable insights. We release the complete implementation for the development of the device in conjunction with a demo web platform to test uploaded videos at https://github.com/OpenGVLab/vinci.
EgoExoLearn: A Dataset for Bridging Asynchronous Ego- and Exo-centric View of Procedural Activities in Real World
Mar 24, 2024
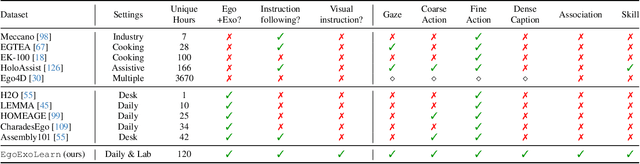


Being able to map the activities of others into one's own point of view is one fundamental human skill even from a very early age. Taking a step toward understanding this human ability, we introduce EgoExoLearn, a large-scale dataset that emulates the human demonstration following process, in which individuals record egocentric videos as they execute tasks guided by demonstration videos. Focusing on the potential applications in daily assistance and professional support, EgoExoLearn contains egocentric and demonstration video data spanning 120 hours captured in daily life scenarios and specialized laboratories. Along with the videos we record high-quality gaze data and provide detailed multimodal annotations, formulating a playground for modeling the human ability to bridge asynchronous procedural actions from different viewpoints. To this end, we present benchmarks such as cross-view association, cross-view action planning, and cross-view referenced skill assessment, along with detailed analysis. We expect EgoExoLearn can serve as an important resource for bridging the actions across views, thus paving the way for creating AI agents capable of seamlessly learning by observing humans in the real world. Code and data can be found at: https://github.com/OpenGVLab/EgoExoLearn
Compound Prototype Matching for Few-shot Action Recognition
Jul 19, 2022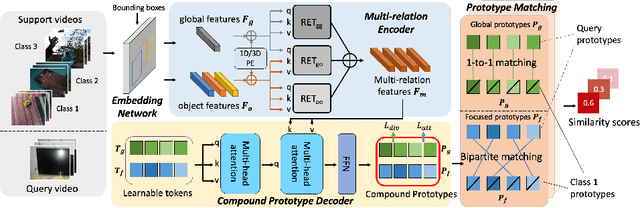
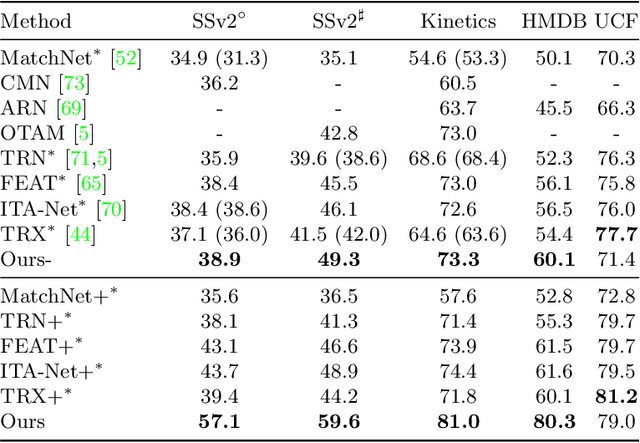
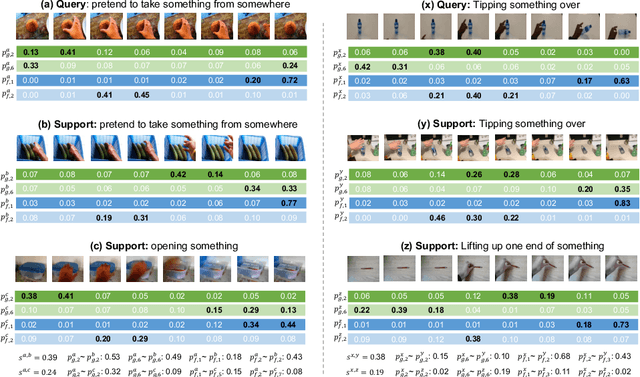
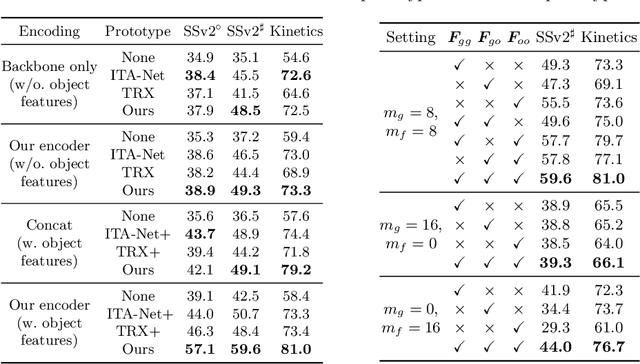
Few-shot action recognition aims to recognize novel action classes using only a small number of labeled training samples. In this work, we propose a novel approach that first summarizes each video into compound prototypes consisting of a group of global prototypes and a group of focused prototypes, and then compares video similarity based on the prototypes. Each global prototype is encouraged to summarize a specific aspect from the entire video, for example, the start/evolution of the action. Since no clear annotation is provided for the global prototypes, we use a group of focused prototypes to focus on certain timestamps in the video. We compare video similarity by matching the compound prototypes between the support and query videos. The global prototypes are directly matched to compare videos from the same perspective, for example, to compare whether two actions start similarly. For the focused prototypes, since actions have various temporal variations in the videos, we apply bipartite matching to allow the comparison of actions with different temporal positions and shifts. Experiments demonstrate that our proposed method achieves state-of-the-art results on multiple benchmarks.
Stacked Temporal Attention: Improving First-person Action Recognition by Emphasizing Discriminative Clips
Dec 02, 2021
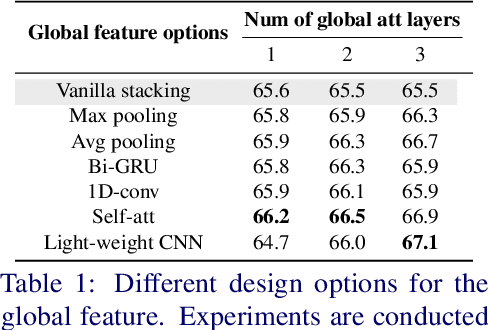
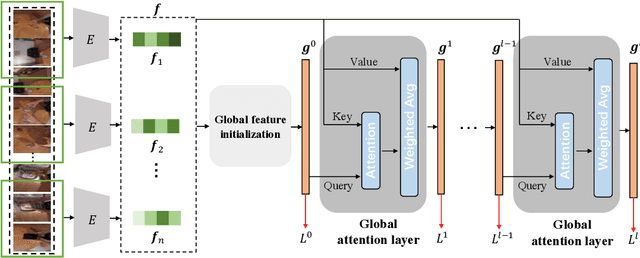
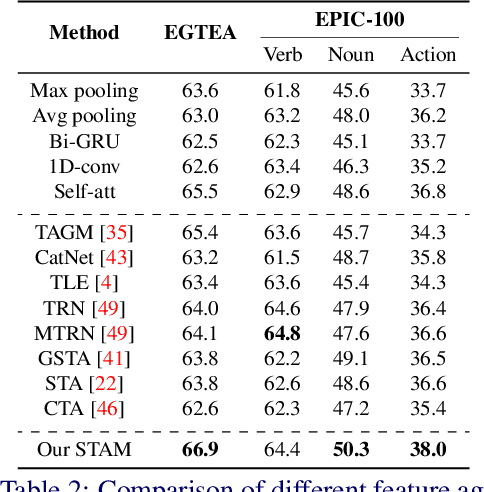
First-person action recognition is a challenging task in video understanding. Because of strong ego-motion and a limited field of view, many backgrounds or noisy frames in a first-person video can distract an action recognition model during its learning process. To encode more discriminative features, the model needs to have the ability to focus on the most relevant part of the video for action recognition. Previous works explored to address this problem by applying temporal attention but failed to consider the global context of the full video, which is critical for determining the relatively significant parts. In this work, we propose a simple yet effective Stacked Temporal Attention Module (STAM) to compute temporal attention based on the global knowledge across clips for emphasizing the most discriminative features. We achieve this by stacking multiple self-attention layers. Instead of naive stacking, which is experimentally proven to be ineffective, we carefully design the input to each self-attention layer so that both the local and global context of the video is considered during generating the temporal attention weights. Experiments demonstrate that our proposed STAM can be built on top of most existing backbones and boost the performance in various datasets.
Leveraging Human Selective Attention for Medical Image Analysis with Limited Training Data
Dec 02, 2021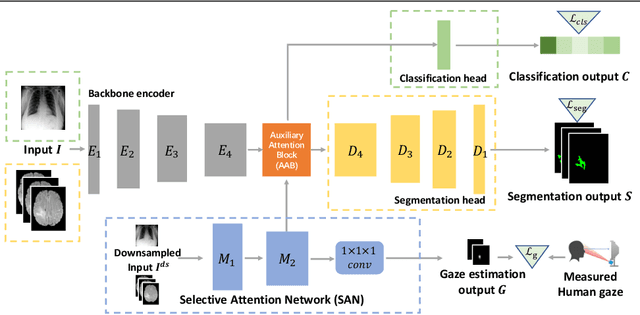
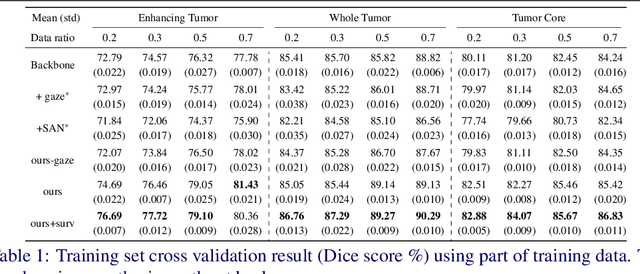
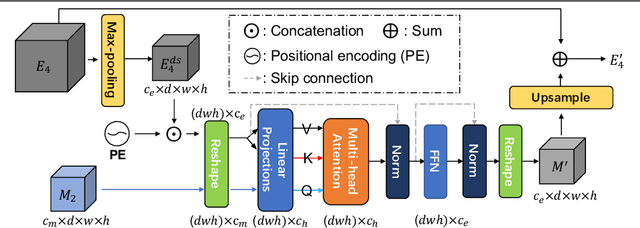

The human gaze is a cost-efficient physiological data that reveals human underlying attentional patterns. The selective attention mechanism helps the cognition system focus on task-relevant visual clues by ignoring the presence of distractors. Thanks to this ability, human beings can efficiently learn from a very limited number of training samples. Inspired by this mechanism, we aim to leverage gaze for medical image analysis tasks with small training data. Our proposed framework includes a backbone encoder and a Selective Attention Network (SAN) that simulates the underlying attention. The SAN implicitly encodes information such as suspicious regions that is relevant to the medical diagnose tasks by estimating the actual human gaze. Then we design a novel Auxiliary Attention Block (AAB) to allow information from SAN to be utilized by the backbone encoder to focus on selective areas. Specifically, this block uses a modified version of a multi-head attention layer to simulate the human visual search procedure. Note that the SAN and AAB can be plugged into different backbones, and the framework can be used for multiple medical image analysis tasks when equipped with task-specific heads. Our method is demonstrated to achieve superior performance on both 3D tumor segmentation and 2D chest X-ray classification tasks. We also show that the estimated gaze probability map of the SAN is consistent with an actual gaze fixation map obtained by board-certified doctors.