 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Robustness In Sparse Autoencoders via Masked Regularization
Apr 07, 2026Sparse autoencoders (SAEs) are widely used in mechanistic interpretability to project LLM activations onto sparse latent spaces. However, sparsity alone is an imperfect proxy for interpretability, and current training objectives often result in brittle latent representations. SAEs are known to be prone to feature absorption, where general features are subsumed by more specific ones due to co-occurrence, degrading interpretability despite high reconstruction fidelity. Recent negative results on Out-of-Distribution (OOD) performance further underscore broader robustness related failures tied to under-specified training objectives. We address this by proposing a masking-based regularization that randomly replaces tokens during training to disrupt co-occurrence patterns. This improves robustness across SAE architectures and sparsity levels reducing absorption, enhancing probing performance, and narrowing the OOD gap. Our results point toward a practical path for more reliable interpretability tools.
The Anatomy of Uncertainty in LLMs
Mar 26, 2026Understanding why a large language model (LLM) is uncertain about the response is important for their reliable deployment. Current approaches, which either provide a single uncertainty score or rely on the classical aleatoric-epistemic dichotomy, fail to offer actionable insights for improving the generative model. Recent studies have also shown that such methods are not enough for understanding uncertainty in LLMs. In this work, we advocate for an uncertainty decomposition framework that dissects LLM uncertainty into three distinct semantic components: (i) input ambiguity, arising from ambiguous prompts; (ii) knowledge gaps, caused by insufficient parametric evidence; and (iii) decoding randomness, stemming from stochastic sampling. Through a series of experiments we demonstrate that the dominance of these components can shift across model size and task. Our framework provides a better understanding to audit LLM reliability and detect hallucinations, paving the way for targeted interventions and more trustworthy systems.
Interpretable and Steerable Concept Bottleneck Sparse Autoencoders
Dec 11, 2025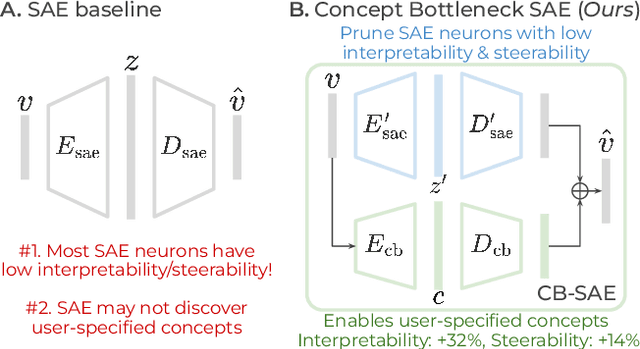



Sparse autoencoders (SAEs) promise a unified approach for mechanistic interpretability, concept discovery, and model steering in LLMs and LVLMs. However, realizing this potential requires that the learned features be both interpretable and steerable. To that end, we introduce two new computationally inexpensive interpretability and steerability metrics and conduct a systematic analysis on LVLMs. Our analysis uncovers two observations; (i) a majority of SAE neurons exhibit either low interpretability or low steerability or both, rendering them ineffective for downstream use; and (ii) due to the unsupervised nature of SAEs, user-desired concepts are often absent in the learned dictionary, thus limiting their practical utility. To address these limitations, we propose Concept Bottleneck Sparse Autoencoders (CB-SAE) - a novel post-hoc framework that prunes low-utility neurons and augments the latent space with a lightweight concept bottleneck aligned to a user-defined concept set. The resulting CB-SAE improves interpretability by +32.1% and steerability by +14.5% across LVLMs and image generation tasks. We will make our code and model weights available.
Visual Exploration of Feature Relationships in Sparse Autoencoders with Curated Concepts
Nov 08, 2025Sparse autoencoders (SAEs) have emerged as a powerful tool for uncovering interpretable features in large language models (LLMs) through the sparse directions they learn. However, the sheer number of extracted directions makes comprehensive exploration intractable. While conventional embedding techniques such as UMAP can reveal global structure, they suffer from limitations including high-dimensional compression artifacts, overplotting, and misleading neighborhood distortions. In this work, we propose a focused exploration framework that prioritizes curated concepts and their corresponding SAE features over attempts to visualize all available features simultaneously. We present an interactive visualization system that combines topology-based visual encoding with dimensionality reduction to faithfully represent both local and global relationships among selected features. This hybrid approach enables users to investigate SAE behavior through targeted, interpretable subsets, facilitating deeper and more nuanced analysis of concept representation in latent space.
Leveraging Registers in Vision Transformers for Robust Adaptation
Jan 08, 2025


Vision Transformers (ViTs) have shown success across a variety of tasks due to their ability to capture global image representations. Recent studies have identified the existence of high-norm tokens in ViTs, which can interfere with unsupervised object discovery. To address this, the use of "registers" which are additional tokens that isolate high norm patch tokens while capturing global image-level information has been proposed. While registers have been studied extensively for object discovery, their generalization properties particularly in out-of-distribution (OOD) scenarios, remains underexplored. In this paper, we examine the utility of register token embeddings in providing additional features for improving generalization and anomaly rejection. To that end, we propose a simple method that combines the special CLS token embedding commonly employed in ViTs with the average-pooled register embeddings to create feature representations which are subsequently used for training a downstream classifier. We find that this enhances OOD generalization and anomaly rejection, while maintaining in-distribution (ID) performance. Extensive experiments across multiple ViT backbones trained with and without registers reveal consistent improvements of 2-4\% in top-1 OOD accuracy and a 2-3\% reduction in false positive rates for anomaly detection. Importantly, these gains are achieved without additional computational overhead.
On The Role of Prompt Construction In Enhancing Efficacy and Efficiency of LLM-Based Tabular Data Generation
Sep 06, 2024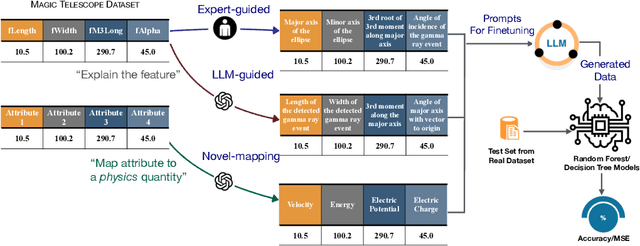
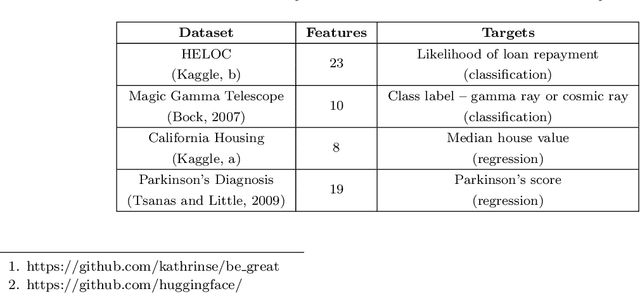
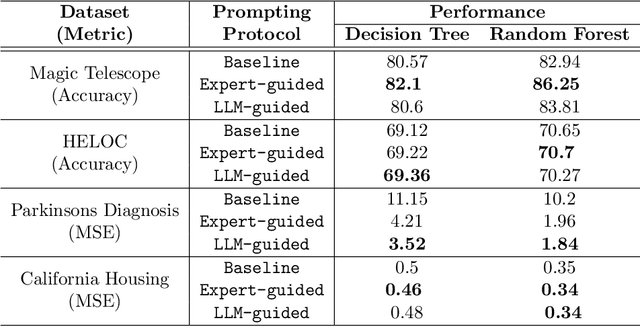
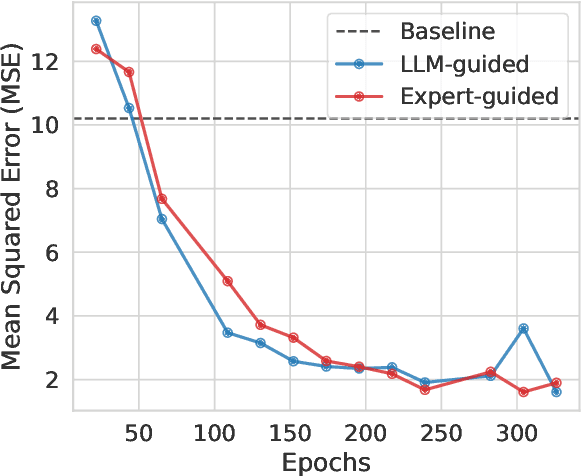
LLM-based data generation for real-world tabular data can be challenged by the lack of sufficient semantic context in feature names used to describe columns. We hypothesize that enriching prompts with domain-specific insights can improve both the quality and efficiency of data generation. To test this hypothesis, we explore three prompt construction protocols: Expert-guided, LLM-guided, and Novel-Mapping. Through empirical studies with the recently proposed GReaT framework, we find that context-enriched prompts lead to significantly improved data generation quality and training efficiency.
DECIDER: Leveraging Foundation Model Priors for Improved Model Failure Detection and Explanation
Aug 01, 2024



Reliably detecting when a deployed machine learning model is likely to fail on a given input is crucial for ensuring safe operation. In this work, we propose DECIDER (Debiasing Classifiers to Identify Errors Reliably), a novel approach that leverages priors from large language models (LLMs) and vision-language models (VLMs) to detect failures in image classification models. DECIDER utilizes LLMs to specify task-relevant core attributes and constructs a ``debiased'' version of the classifier by aligning its visual features to these core attributes using a VLM, and detects potential failure by measuring disagreement between the original and debiased models. In addition to proactively identifying samples on which the model would fail, DECIDER also provides human-interpretable explanations for failure through a novel attribute-ablation strategy. Through extensive experiments across diverse benchmarks spanning subpopulation shifts (spurious correlations, class imbalance) and covariate shifts (synthetic corruptions, domain shifts), DECIDER consistently achieves state-of-the-art failure detection performance, significantly outperforming baselines in terms of the overall Matthews correlation coefficient as well as failure and success recall. Our codes can be accessed at~\url{https://github.com/kowshikthopalli/DECIDER/}
Speeding Up Image Classifiers with Little Companions
Jun 24, 2024Scaling up neural networks has been a key recipe to the success of large language and vision models. However, in practice, up-scaled models can be disproportionately costly in terms of computations, providing only marginal improvements in performance; for example, EfficientViT-L3-384 achieves <2% improvement on ImageNet-1K accuracy over the base L1-224 model, while requiring $14\times$ more multiply-accumulate operations (MACs). In this paper, we investigate scaling properties of popular families of neural networks for image classification, and find that scaled-up models mostly help with "difficult" samples. Decomposing the samples by difficulty, we develop a simple model-agnostic two-pass Little-Big algorithm that first uses a light-weight "little" model to make predictions of all samples, and only passes the difficult ones for the "big" model to solve. Good little companion achieve drastic MACs reduction for a wide variety of model families and scales. Without loss of accuracy or modification of existing models, our Little-Big models achieve MACs reductions of 76% for EfficientViT-L3-384, 81% for EfficientNet-B7-600, 71% for DeiT3-L-384 on ImageNet-1K. Little-Big also speeds up the InternImage-G-512 model by 62% while achieving 90% ImageNet-1K top-1 accuracy, serving both as a strong baseline and as a simple practical method for large model compression.
On the Use of Anchoring for Training Vision Models
Jun 01, 2024



Anchoring is a recent, architecture-agnostic principle for training deep neural networks that has been shown to significantly improve uncertainty estimation, calibration, and extrapolation capabilities. In this paper, we systematically explore anchoring as a general protocol for training vision models, providing fundamental insights into its training and inference processes and their implications for generalization and safety. Despite its promise, we identify a critical problem in anchored training that can lead to an increased risk of learning undesirable shortcuts, thereby limiting its generalization capabilities. To address this, we introduce a new anchored training protocol that employs a simple regularizer to mitigate this issue and significantly enhances generalization. We empirically evaluate our proposed approach across datasets and architectures of varying scales and complexities, demonstrating substantial performance gains in generalization and safety metrics compared to the standard training protocol.
Target-Aware Generative Augmentations for Single-Shot Adaptation
May 22, 2023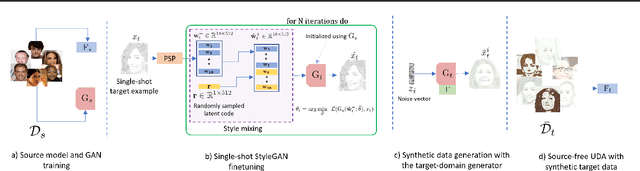
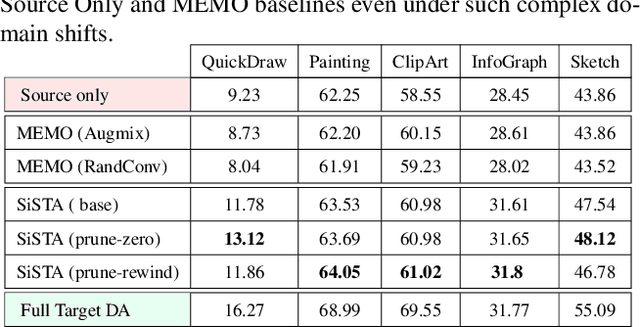
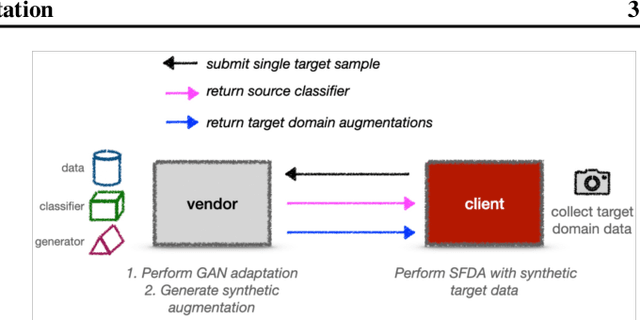
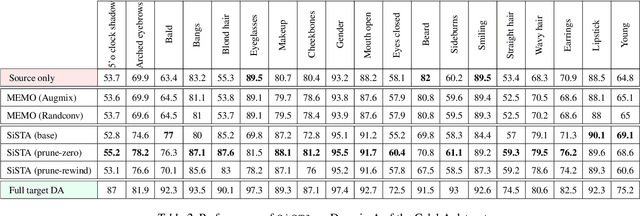
In this paper, we address the problem of adapting models from a source domain to a target domain, a task that has become increasingly important due to the brittle generalization of deep neural networks. While several test-time adaptation techniques have emerged, they typically rely on synthetic toolbox data augmentations in cases of limited target data availability. We consider the challenging setting of single-shot adaptation and explore the design of augmentation strategies. We argue that augmentations utilized by existing methods are insufficient to handle large distribution shifts, and hence propose a new approach SiSTA, which first fine-tunes a generative model from the source domain using a single-shot target, and then employs novel sampling strategies for curating synthetic target data. Using experiments on a variety of benchmarks, distribution shifts and image corruptions, we find that SiSTA produces significantly improved generalization over existing baselines in face attribute detection and multi-class object recognition. Furthermore, SiSTA performs competitively to models obtained by training on larger target datasets. Our codes can be accessed at https://github.com/Rakshith-2905/SiSTA.