 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompositional Physical Reasoning of Objects and Events from Videos
Aug 02, 2024Understanding and reasoning about objects' physical properties in the natural world is a fundamental challenge in artificial intelligence. While some properties like colors and shapes can be directly observed, others, such as mass and electric charge, are hidden from the objects' visual appearance. This paper addresses the unique challenge of inferring these hidden physical properties from objects' motion and interactions and predicting corresponding dynamics based on the inferred physical properties. We first introduce the Compositional Physical Reasoning (ComPhy) dataset. For a given set of objects, ComPhy includes limited videos of them moving and interacting under different initial conditions. The model is evaluated based on its capability to unravel the compositional hidden properties, such as mass and charge, and use this knowledge to answer a set of questions. Besides the synthetic videos from simulators, we also collect a real-world dataset to show further test physical reasoning abilities of different models. We evaluate state-of-the-art video reasoning models on ComPhy and reveal their limited ability to capture these hidden properties, which leads to inferior performance. We also propose a novel neuro-symbolic framework, Physical Concept Reasoner (PCR), that learns and reasons about both visible and hidden physical properties from question answering. After training, PCR demonstrates remarkable capabilities. It can detect and associate objects across frames, ground visible and hidden physical properties, make future and counterfactual predictions, and utilize these extracted representations to answer challenging questions.
M3GIA: A Cognition Inspired Multilingual and Multimodal General Intelligence Ability Benchmark
Jun 08, 2024

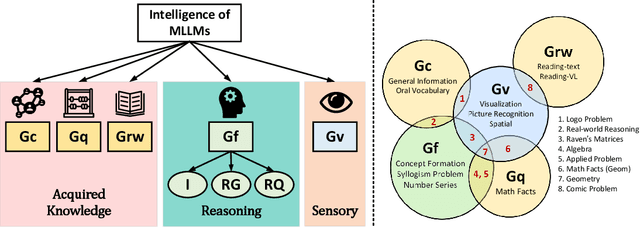

As recent multi-modality large language models (MLLMs) have shown formidable proficiency on various complex tasks, there has been increasing attention on debating whether these models could eventually mirror human intelligence. However, existing benchmarks mainly focus on evaluating solely on task performance, such as the accuracy of identifying the attribute of an object. Combining well-developed cognitive science to understand the intelligence of MLLMs beyond superficial achievements remains largely unexplored. To this end, we introduce the first cognitive-driven multi-lingual and multi-modal benchmark to evaluate the general intelligence ability of MLLMs, dubbed M3GIA. Specifically, we identify five key cognitive factors based on the well-recognized Cattell-Horn-Carrol (CHC) model of intelligence and propose a novel evaluation metric. In addition, since most MLLMs are trained to perform in different languages, a natural question arises: is language a key factor influencing the cognitive ability of MLLMs? As such, we go beyond English to encompass other languages based on their popularity, including Chinese, French, Spanish, Portuguese and Korean, to construct our M3GIA. We make sure all the data relevant to the cultural backgrounds are collected from their native context to avoid English-centric bias. We collected a significant corpus of data from human participants, revealing that the most advanced MLLM reaches the lower boundary of human intelligence in English. Yet, there remains a pronounced disparity in the other five languages assessed. We also reveals an interesting winner takes all phenomenon that are aligned with the discovery in cognitive studies. Our benchmark will be open-sourced, with the aspiration of facilitating the enhancement of cognitive capabilities in MLLMs.
ComPhy: Compositional Physical Reasoning of Objects and Events from Videos
May 02, 2022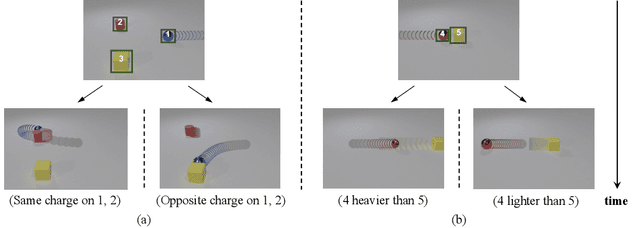
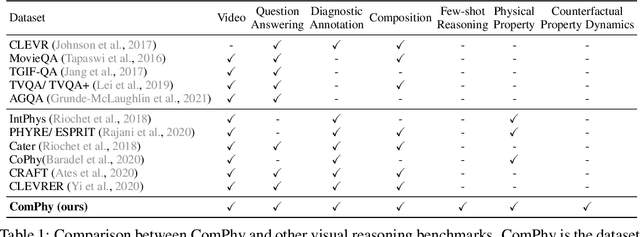
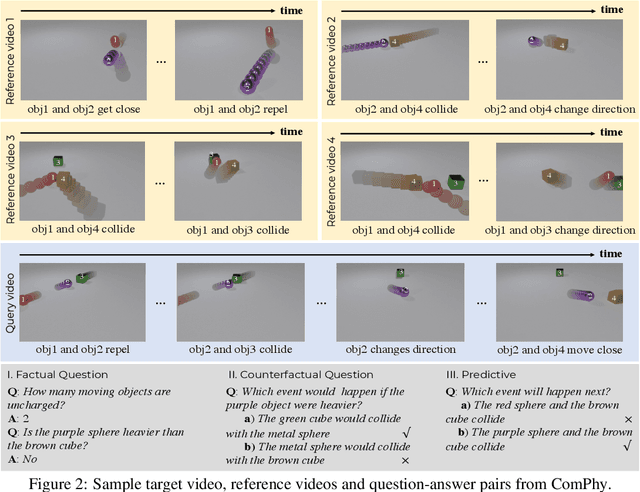
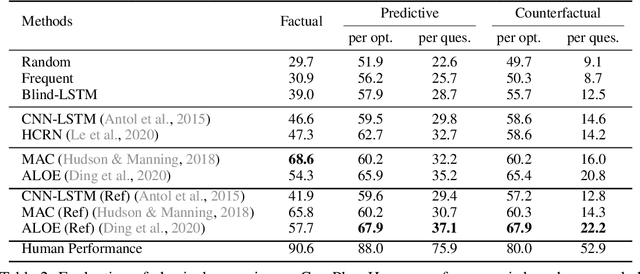
Objects' motions in nature are governed by complex interactions and their properties. While some properties, such as shape and material, can be identified via the object's visual appearances, others like mass and electric charge are not directly visible. The compositionality between the visible and hidden properties poses unique challenges for AI models to reason from the physical world, whereas humans can effortlessly infer them with limited observations. Existing studies on video reasoning mainly focus on visually observable elements such as object appearance, movement, and contact interaction. In this paper, we take an initial step to highlight the importance of inferring the hidden physical properties not directly observable from visual appearances, by introducing the Compositional Physical Reasoning (ComPhy) dataset. For a given set of objects, ComPhy includes few videos of them moving and interacting under different initial conditions. The model is evaluated based on its capability to unravel the compositional hidden properties, such as mass and charge, and use this knowledge to answer a set of questions posted on one of the videos. Evaluation results of several state-of-the-art video reasoning models on ComPhy show unsatisfactory performance as they fail to capture these hidden properties. We further propose an oracle neural-symbolic framework named Compositional Physics Learner (CPL), combining visual perception, physical property learning, dynamic prediction, and symbolic execution into a unified framework. CPL can effectively identify objects' physical properties from their interactions and predict their dynamics to answer questions.
Immersive Text Game and Personality Classification
Mar 20, 2022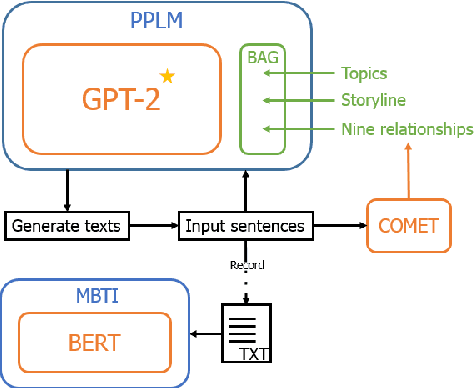
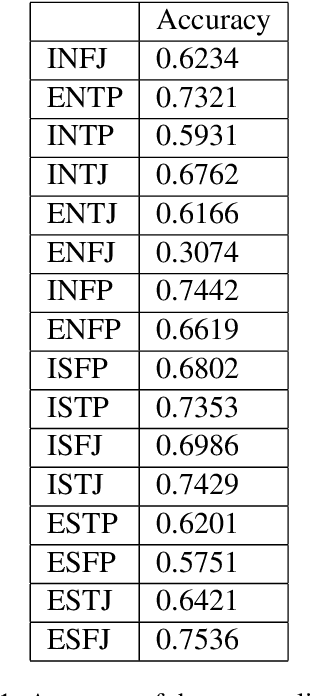
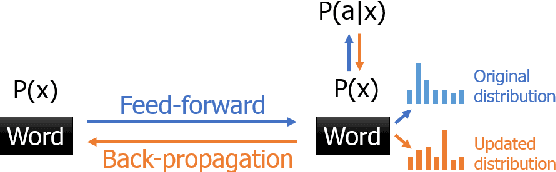
We designed and built a game called \textit{Immersive Text Game}, which allows the player to choose a story and a character, and interact with other characters in the story in an immersive manner of dialogues. The game is based on several latest models, including text generation language model, information extraction model, commonsense reasoning model, and psychology evaluation model. In the past, similar text games usually let players choose from limited actions instead of answering on their own, and not every time what characters said are determined by the player. Through the combination of these models and elaborate game mechanics and modes, the player will find some novel experiences as driven through the storyline.
Visual Grounding of Learned Physical Models
Apr 28, 2020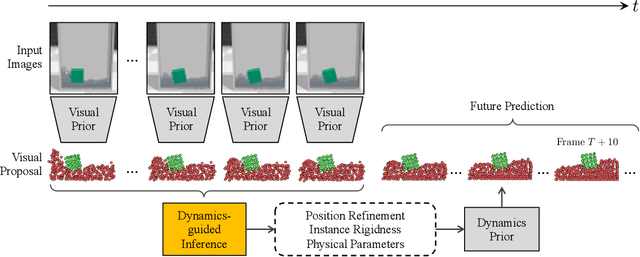
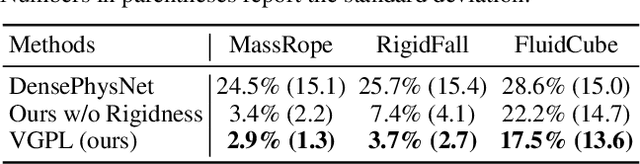
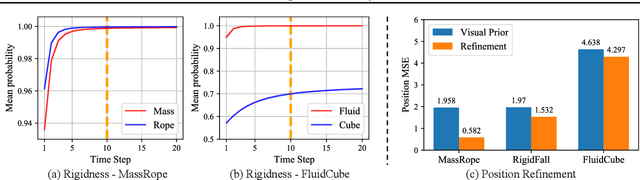

Humans intuitively recognize objects' physical properties and predict their motion, even when the objects are engaged in complicated interactions. The abilities to perform physical reasoning and to adapt to new environments, while intrinsic to humans, remain challenging to state-of-the-art computational models. In this work, we present a neural model that simultaneously reasons about physics and make future predictions based on visual and dynamics priors. The visual prior predicts a particle-based representation of the system from visual observations. An inference module operates on those particles, predicting and refining estimates of particle locations, object states, and physical parameters, subject to the constraints imposed by the dynamics prior, which we refer to as visual grounding. We demonstrate the effectiveness of our method in environments involving rigid objects, deformable materials, and fluids. Experiments show that our model can infer the physical properties within a few observations, which allows the model to quickly adapt to unseen scenarios and make accurate predictions into the future.
CLEVRER: CoLlision Events for Video REpresentation and Reasoning
Oct 03, 2019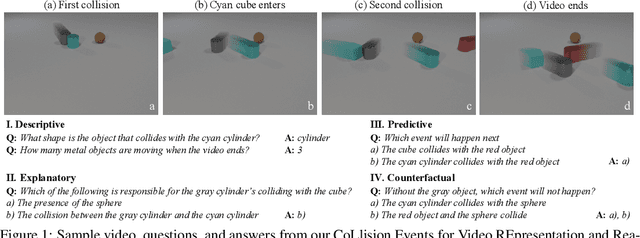
The ability to reason about temporal and causal events from videos lies at the core of human intelligence. Most video reasoning benchmarks, however, focus on pattern recognition from complex visual and language input, instead of on causal structure. We study the complementary problem, exploring the temporal and causal structures behind videos of objects with simple visual appearance. To this end, we introduce the CoLlision Events for Video REpresentation and Reasoning (CLEVRER), a diagnostic video dataset for systematic evaluation of computational models on a wide range of reasoning tasks. Motivated by the theory of human casual judgment, CLEVRER includes four types of questions: descriptive (e.g., "what color"), explanatory ("what is responsible for"), predictive ("what will happen next"), and counterfactual ("what if"). We evaluate various state-of-the-art models for visual reasoning on our benchmark. While these models thrive on the perception-based task (descriptive), they perform poorly on the causal tasks (explanatory, predictive and counterfactual), suggesting that a principled approach for causal reasoning should incorporate the capability of both perceiving complex visual and language inputs, and understanding the underlying dynamics and causal relations. We also study an oracle model that explicitly combines these components via symbolic representations.
Roll-back Hamiltonian Monte Carlo
Sep 08, 2017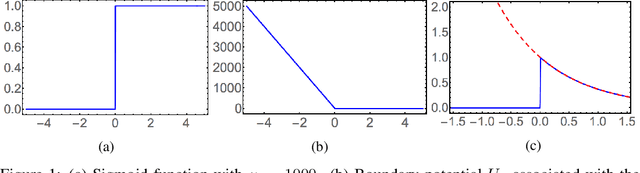
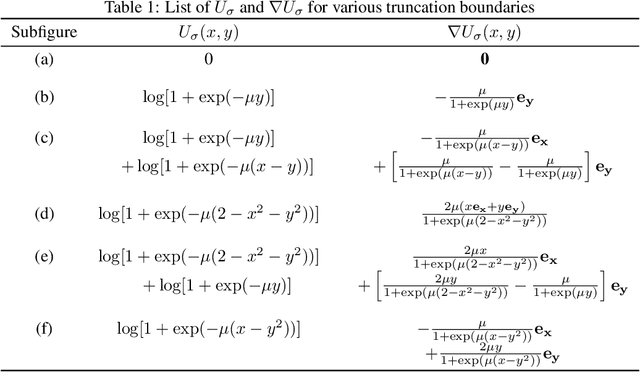
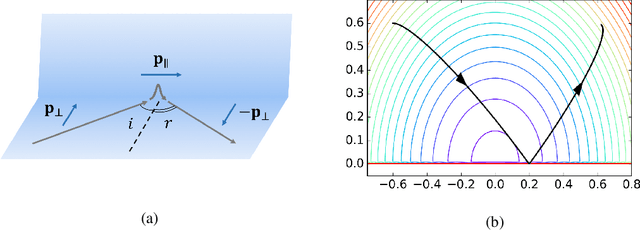
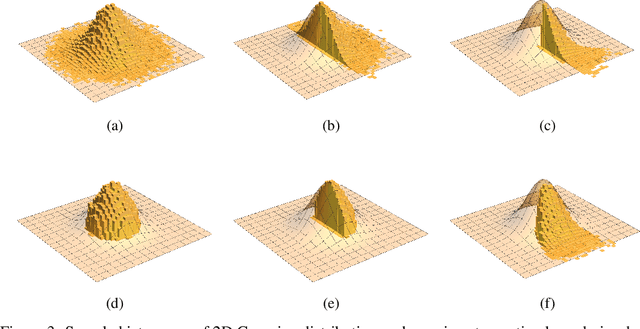
We propose a new framework for Hamiltonian Monte Carlo (HMC) on truncated probability distributions with smooth underlying density functions. Traditional HMC requires computing the gradient of potential function associated with the target distribution, and therefore does not perform its full power on truncated distributions due to lack of continuity and differentiability. In our framework, we introduce a sharp sigmoid factor in the density function to approximate the probability drop at the truncation boundary. The target potential function is approximated by a new potential which smoothly extends to the entire sample space. HMC is then performed on the approximate potential. While our method is easy to implement and applies to a wide range of problems, it also achieves comparable computational efficiency on various sampling tasks compared to other baseline methods. RBHMC also gives rise to a new approach for Bayesian inference on constrained spaces.