 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhen Does Delegation Beat Majority? A Delegation-Based Aggregator for Multi-Sample LLM Inference
Jun 06, 2026Majority voting over sampled answers is the dominant unsupervised aggregator for multi-sample LLM inference. We show that piping the signals every sample carries into a delegation-based aggregator (Propagational Proxy Voting, PPV) yields an unsupervised consensus rule that beats majority on MMLU-Pro by +1.5 pp overall and +2.24 pp on the non-trivial subset (paired McNemar p ~ 1.0e-14, n = 8,099). Majority discards two free signals every sample carries: within-group letter entropy and between-group reasoning geometry. PPV exposes two per-voter levers that consume exactly these signals: WHEN (how much weight a voter keeps on its own pick) and WHOM (how it splits the remainder across peers). We drive WHEN with letter entropy and WHOM with per-question-centered embedding cosine. The method needs no gold labels and no auxiliary training: per question, we partition 128 sampled generations into 16 groups, compute each group's letter-level semantic entropy and reasoning embedding centroid, and feed both into a stochastic delegation matrix whose stationary distribution selects the consensus answer. We walk through an example in which PPV overturns a clear 10-6 majority for the wrong letter: the 10-voter majority cluster is geometrically incoherent (mean within-cluster cosine -0.02) while the 6-voter minority is tight (+0.26), so propagated delegation mass concentrates on the minority's answer even though entropy alone would keep the majority ahead. We further report delegation strategies with negative results that constrain the design space for unsupervised LLM aggregation: no within-question ensemble of confidence modes closes the oracle gap.
Do Robots Need Body Language? Comparing Communication Modalities for Legible Motion Intent in Human-Shared Spaces
Apr 03, 2026Robots in shared spaces often move in ways that are difficult for people to interpret, placing the burden on humans to adapt. High-DoF robots exhibit motion that people read as expressive, intentionally or not, making it important to understand how such cues are perceived. We present an online video study evaluating how different signaling modalities, expressive motion, lights, text, and audio, shape people's ability to understand a quadruped robot's upcoming navigation actions (Boston Dynamics Spot). Across four common scenarios, we measure how each modality influences humans' (1) accuracy in predicting the robot's next navigation action, (2) confidence in that prediction, and (3) trust in the robot to act safely. The study tests how expressive motions compare to explicit channels, whether aligned multimodal cues enhance interpretability, and how conflicting cues affect user confidence and trust. We contribute initial evidence on the relative effectiveness of implicit versus explicit signaling strategies.
Position: Simulating Society Requires Simulating Thought
Jun 08, 2025Simulating society with large language models (LLMs), we argue, requires more than generating plausible behavior -- it demands cognitively grounded reasoning that is structured, revisable, and traceable. LLM-based agents are increasingly used to emulate individual and group behavior -- primarily through prompting and supervised fine-tuning. Yet they often lack internal coherence, causal reasoning, and belief traceability -- making them unreliable for analyzing how people reason, deliberate, or respond to interventions. To address this, we present a conceptual modeling paradigm, Generative Minds (GenMinds), which draws from cognitive science to support structured belief representations in generative agents. To evaluate such agents, we introduce the RECAP (REconstructing CAusal Paths) framework, a benchmark designed to assess reasoning fidelity via causal traceability, demographic grounding, and intervention consistency. These contributions advance a broader shift: from surface-level mimicry to generative agents that simulate thought -- not just language -- for social simulations.
TravelAgent: Generative Agents in the Built Environment
Dec 25, 2024Understanding human behavior in built environments is critical for designing functional, user centered urban spaces. Traditional approaches, such as manual observations, surveys, and simplified simulations, often fail to capture the complexity and dynamics of real world behavior. To address these limitations, we introduce TravelAgent, a novel simulation platform that models pedestrian navigation and activity patterns across diverse indoor and outdoor environments under varying contextual and environmental conditions. TravelAgent leverages generative agents integrated into 3D virtual environments, enabling agents to process multimodal sensory inputs and exhibit human-like decision-making, behavior, and adaptation. Through experiments, including navigation, wayfinding, and free exploration, we analyze data from 100 simulations comprising 1898 agent steps across diverse spatial layouts and agent archetypes, achieving an overall task completion rate of 76%. Using spatial, linguistic, and sentiment analyses, we show how agents perceive, adapt to, or struggle with their surroundings and assigned tasks. Our findings highlight the potential of TravelAgent as a tool for urban design, spatial cognition research, and agent-based modeling. We discuss key challenges and opportunities in deploying generative agents for the evaluation and refinement of spatial designs, proposing TravelAgent as a new paradigm for simulating and understanding human experiences in built environments.
TransFlower: An Explainable Transformer-Based Model with Flow-to-Flow Attention for Commuting Flow Prediction
Feb 23, 2024Understanding the link between urban planning and commuting flows is crucial for guiding urban development and policymaking. This research, bridging computer science and urban studies, addresses the challenge of integrating these fields with their distinct focuses. Traditional urban studies methods, like the gravity and radiation models, often underperform in complex scenarios due to their limited handling of multiple variables and reliance on overly simplistic and unrealistic assumptions, such as spatial isotropy. While deep learning models offer improved accuracy, their black-box nature poses a trade-off between performance and explainability -- both vital for analyzing complex societal phenomena like commuting flows. To address this, we introduce TransFlower, an explainable, transformer-based model employing flow-to-flow attention to predict urban commuting patterns. It features a geospatial encoder with an anisotropy-aware relative location encoder for nuanced flow representation. Following this, the transformer-based flow predictor enhances this by leveraging attention mechanisms to efficiently capture flow interactions. Our model outperforms existing methods by up to 30.8% Common Part of Commuters, offering insights into mobility dynamics crucial for urban planning and policy decisions.
Fourier series weight in quantum machine learning
Jan 31, 2023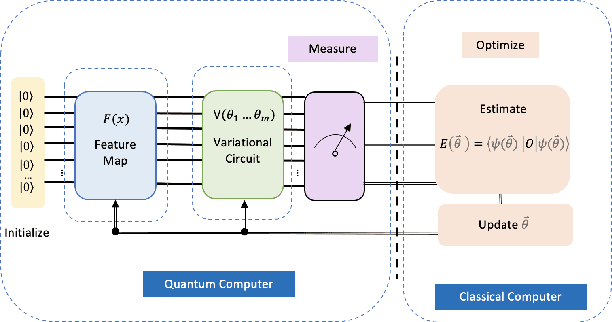

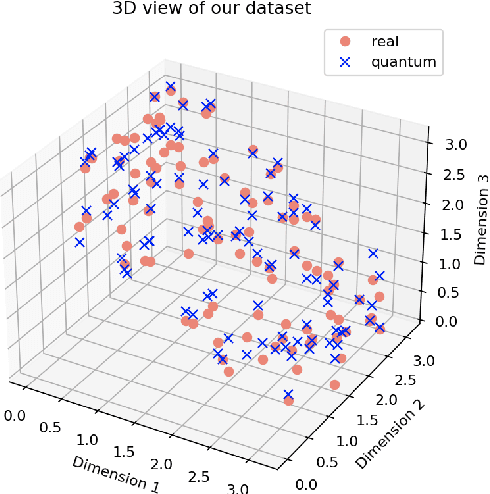

In this work, we aim to confirm the impact of the Fourier series on the quantum machine learning model. We will propose models, tests, and demonstrations to achieve this objective. We designed a quantum machine learning leveraged on the Hamiltonian encoding. With a subtle change, we performed the trigonometric interpolation, binary and multiclass classifier, and a quantum signal processing application. We also proposed a block diagram of determining approximately the Fourier coefficient based on quantum machine learning. We performed and tested all the proposed models using the Pennylane framework.
Generating synthetic mobility data for a realistic population with RNNs to improve utility and privacy
Jan 04, 2022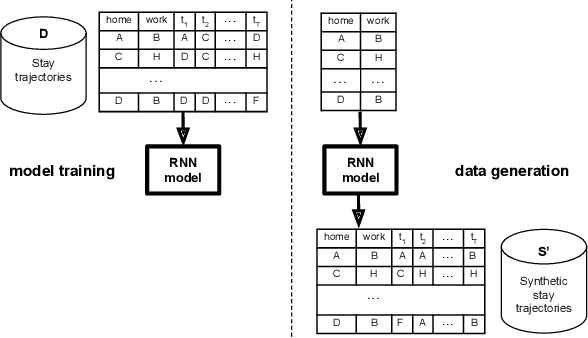
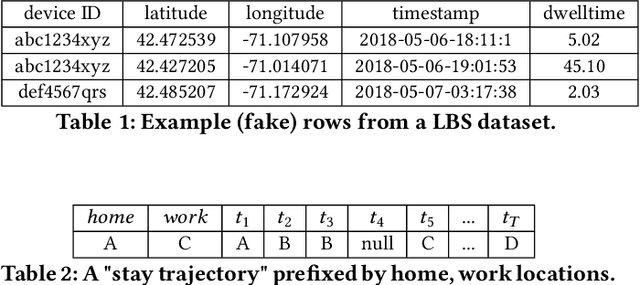
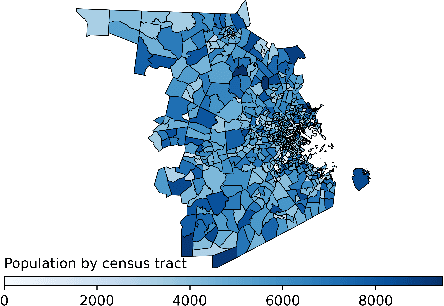
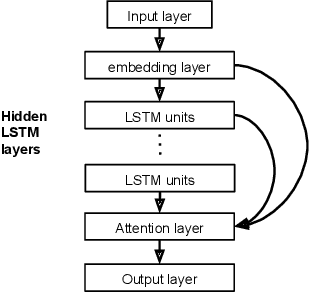
Location data collected from mobile devices represent mobility behaviors at individual and societal levels. These data have important applications ranging from transportation planning to epidemic modeling. However, issues must be overcome to best serve these use cases: The data often represent a limited sample of the population and use of the data jeopardizes privacy. To address these issues, we present and evaluate a system for generating synthetic mobility data using a deep recurrent neural network (RNN) which is trained on real location data. The system takes a population distribution as input and generates mobility traces for a corresponding synthetic population. Related generative approaches have not solved the challenges of capturing both the patterns and variability in individuals' mobility behaviors over longer time periods, while also balancing the generation of realistic data with privacy. Our system leverages RNNs' ability to generate complex and novel sequences while retaining patterns from training data. Also, the model introduces randomness used to calibrate the variation between the synthetic and real data at the individual level. This is to both capture variability in human mobility, and protect user privacy. Location based services (LBS) data from more than 22,700 mobile devices were used in an experimental evaluation across utility and privacy metrics. We show the generated mobility data retain the characteristics of the real data, while varying from the real data at the individual level, and where this amount of variation matches the variation within the real data.
Future mobility as a bio-inspired collaborative system
Jun 15, 2021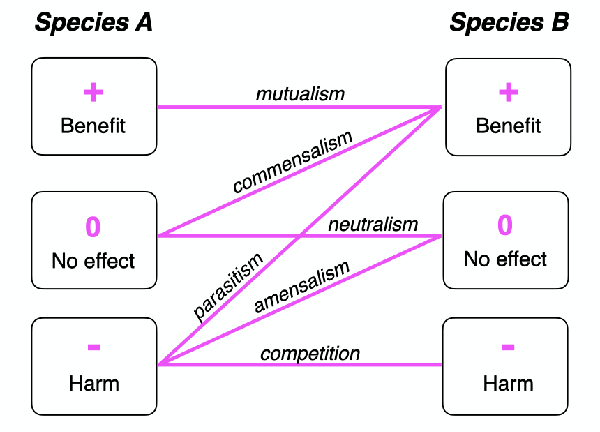
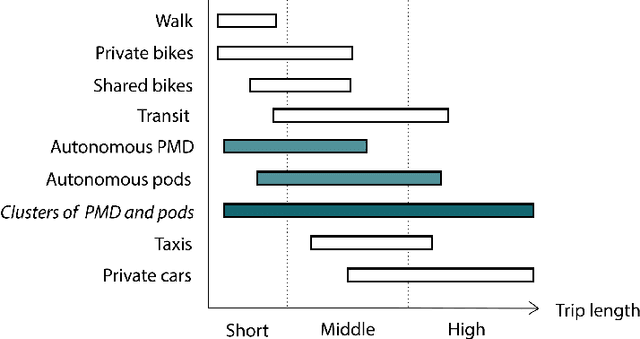
The current trends towards vehicle-sharing, electrification, and autonomy are predicted to transform mobility. Combined appropriately, they have the potential of significantly improving urban mobility. However, what will come after most vehicles are shared, electric, and autonomous remains an open question, especially regarding the interactions between vehicles and how these interactions will impact system-level behaviour. Inspired by nature and supported by swarm robotics and vehicle platooning models, this paper proposes a future mobility in which shared, electric, and autonomous vehicles behave as a bio-inspired collaborative system. The collaboration between vehicles will lead to a system-level behaviour analogous to natural swarms. Natural swarms can divide tasks, cluster, build together, or transport cooperatively. In this future mobility, vehicles will cluster by connecting either physically or virtually, which will enable the possibility of sharing energy, data or computational power, provide services or transfer cargo, among others. Vehicles will collaborate either with vehicles that are part of the same fleet, or with any other vehicle on the road, by finding mutualistic relationships that benefit both parties. The field of swarm robotics has already translated some of the behaviours from natural swarms to artificial systems and, if we further translate these concepts into urban mobility, exciting ideas emerge. Within mobility-related research, the coordinated movement proposed in vehicle platooning models can be seen as a first step towards collaborative mobility. This paper contributes with the proposal of a framework for future mobility that integrates current research and mobility trends in a novel and unique way.
Urban Swarms: A new approach for autonomous waste management
Mar 01, 2019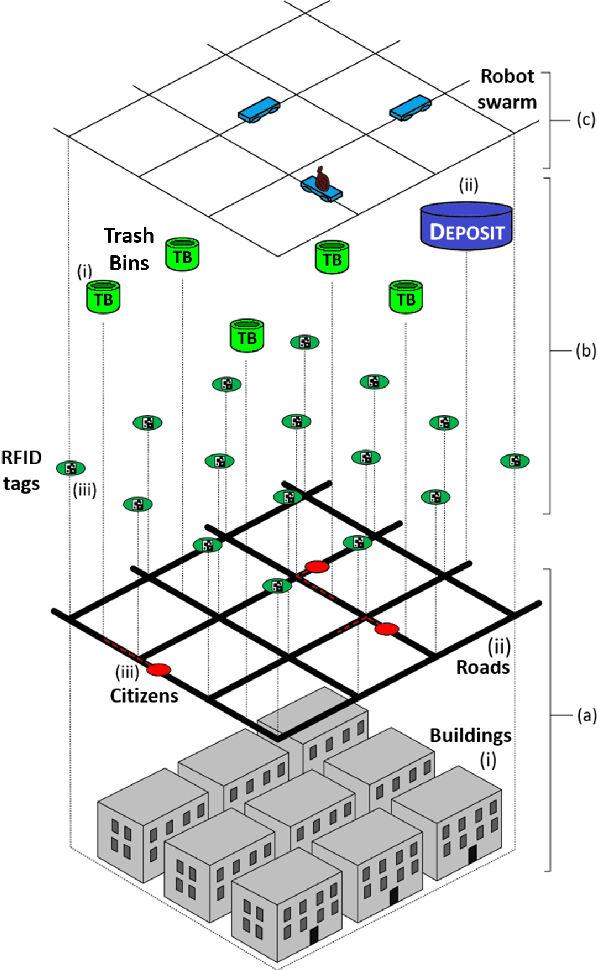
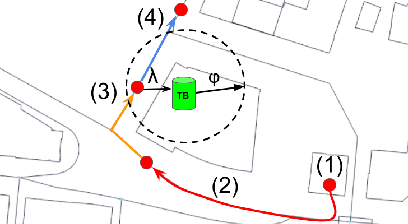
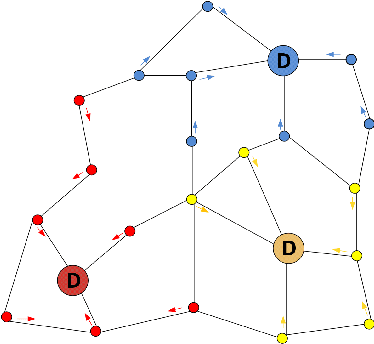
Modern cities are growing ecosystems that face new challenges due to the increasing population demands. One of the many problems they face nowadays is waste management, which has become a pressing issue requiring new solutions. Swarm robotics systems have been attracting an increasing amount of attention in the past years and they are expected to become one of the main driving factors for innovation in the field of robotics. The research presented in this paper explores the feasibility of a swarm robotics system in an urban environment. By using bio-inspired foraging methods such as multi-place foraging and stigmergy-based navigation, a swarm of robots is able to improve the efficiency and autonomy of the urban waste management system in a realistic scenario. To achieve this, a diverse set of simulation experiments was conducted using real-world GIS data and implementing different garbage collection scenarios driven by robot swarms. Results presented in this research show that the proposed system outperforms current approaches. Moreover, results not only show the efficiency of our solution, but also give insights about how to design and customize these systems.