 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLie to Me: Knowledge Graphs for Robust Hallucination Self-Detection in LLMs
Dec 29, 2025Hallucinations, the generation of apparently convincing yet false statements, remain a major barrier to the safe deployment of LLMs. Building on the strong performance of self-detection methods, we examine the use of structured knowledge representations, namely knowledge graphs, to improve hallucination self-detection. Specifically, we propose a simple yet powerful approach that enriches hallucination self-detection by (i) converting LLM responses into knowledge graphs of entities and relations, and (ii) using these graphs to estimate the likelihood that a response contains hallucinations. We evaluate the proposed approach using two widely used LLMs, GPT-4o and Gemini-2.5-Flash, across two hallucination detection datasets. To support more reliable future benchmarking, one of these datasets has been manually curated and enhanced and is released as a secondary outcome of this work. Compared to standard self-detection methods and SelfCheckGPT, a state-of-the-art approach, our method achieves up to 16% relative improvement in accuracy and 20% in F1-score. Our results show that LLMs can better analyse atomic facts when they are structured as knowledge graphs, even when initial outputs contain inaccuracies. This low-cost, model-agnostic approach paves the way toward safer and more trustworthy language models.
Urban Swarms: A new approach for autonomous waste management
Mar 01, 2019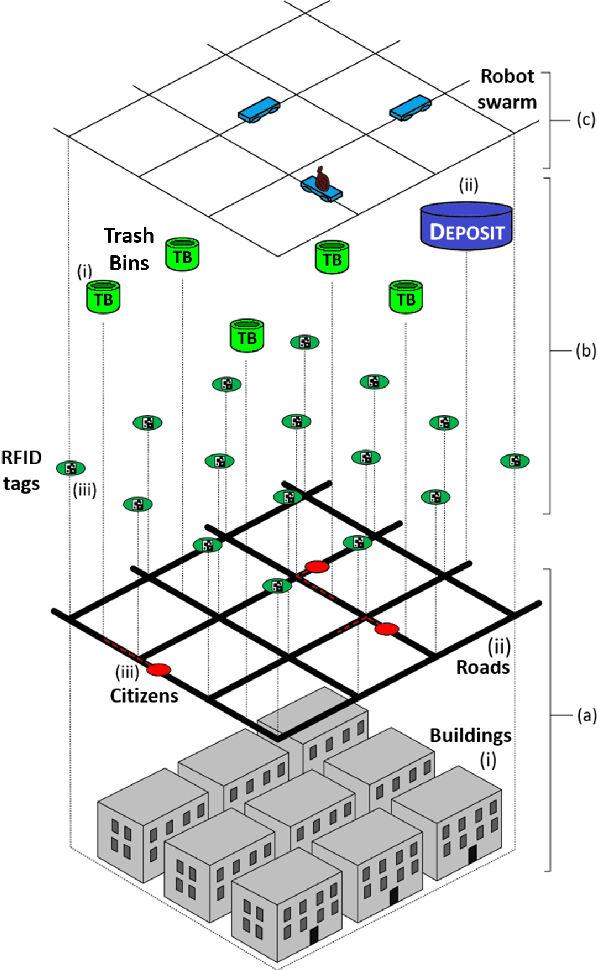
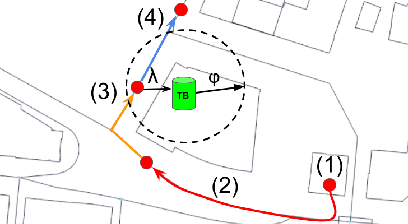
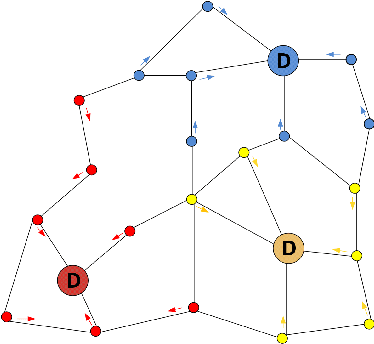
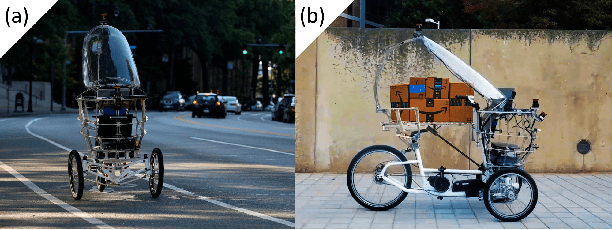
Modern cities are growing ecosystems that face new challenges due to the increasing population demands. One of the many problems they face nowadays is waste management, which has become a pressing issue requiring new solutions. Swarm robotics systems have been attracting an increasing amount of attention in the past years and they are expected to become one of the main driving factors for innovation in the field of robotics. The research presented in this paper explores the feasibility of a swarm robotics system in an urban environment. By using bio-inspired foraging methods such as multi-place foraging and stigmergy-based navigation, a swarm of robots is able to improve the efficiency and autonomy of the urban waste management system in a realistic scenario. To achieve this, a diverse set of simulation experiments was conducted using real-world GIS data and implementing different garbage collection scenarios driven by robot swarms. Results presented in this research show that the proposed system outperforms current approaches. Moreover, results not only show the efficiency of our solution, but also give insights about how to design and customize these systems.