 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeiTrash: Incentivized Token Rewards for Automated Sorting and Handling
Feb 25, 2025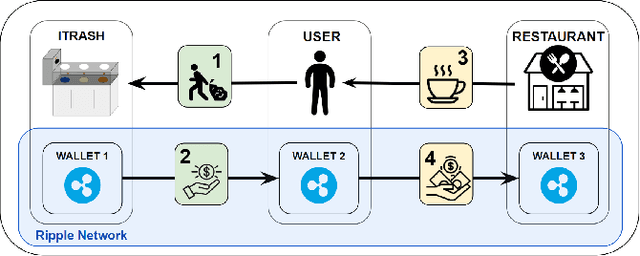
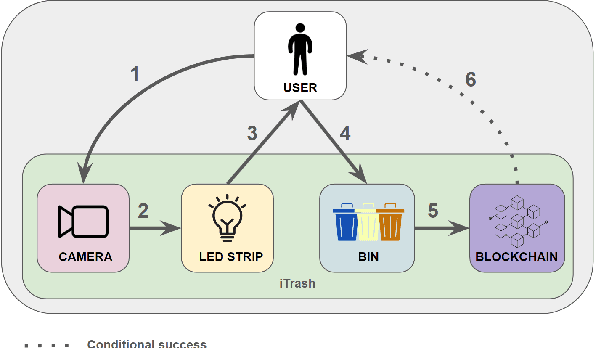
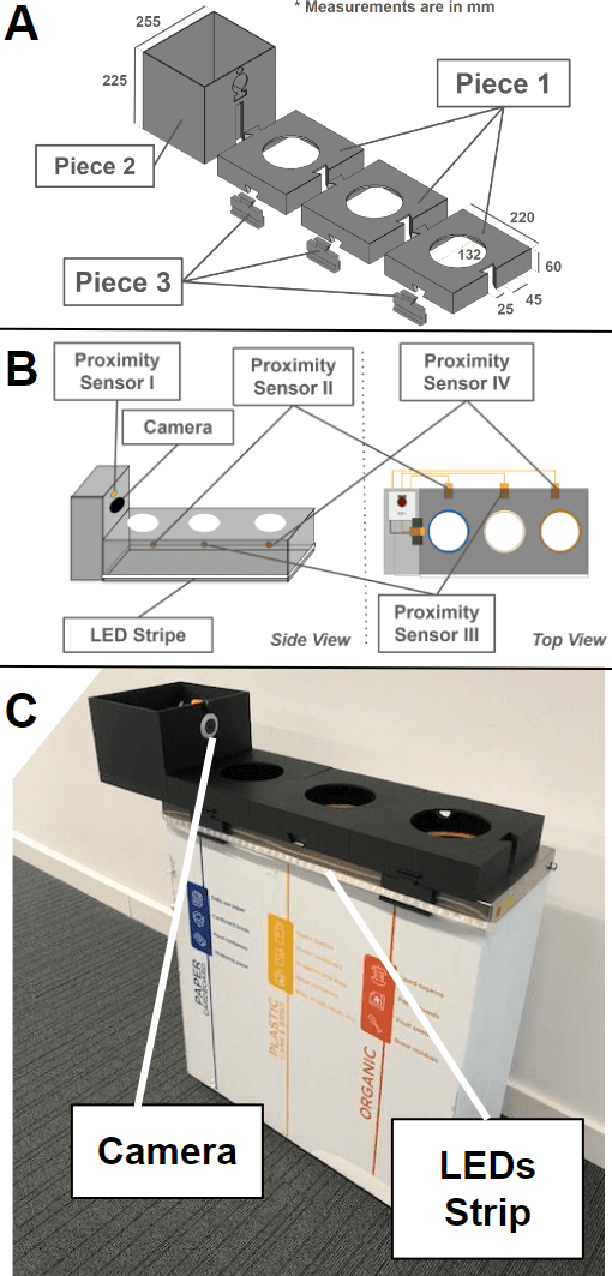
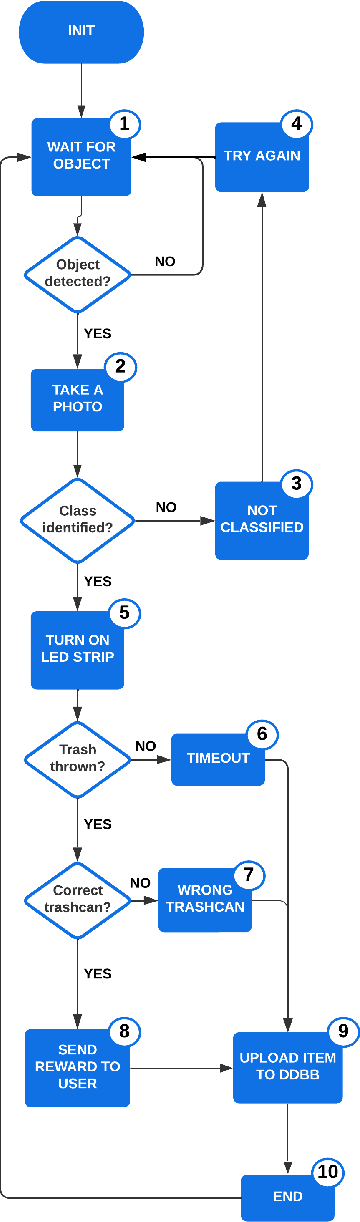
As robotic systems (RS) become more autonomous, they are becoming increasingly used in small spaces and offices to automate tasks such as cleaning, infrastructure maintenance, or resource management. In this paper, we propose iTrash, an intelligent trashcan that aims to improve recycling rates in small office spaces. For that, we ran a 5 day experiment and found that iTrash can produce an efficiency increase of more than 30% compared to traditional trashcans. The findings derived from this work, point to the fact that using iTrash not only increase recyclying rates, but also provides valuable data such as users behaviour or bin usage patterns, which cannot be taken from a normal trashcan. This information can be used to predict and optimize some tasks in these spaces. Finally, we explored the potential of using blockchain technology to create economic incentives for recycling, following a Save-as-you-Throw (SAYT) model.
Gaka-chu: a self-employed autonomous robot artist
Mar 07, 2022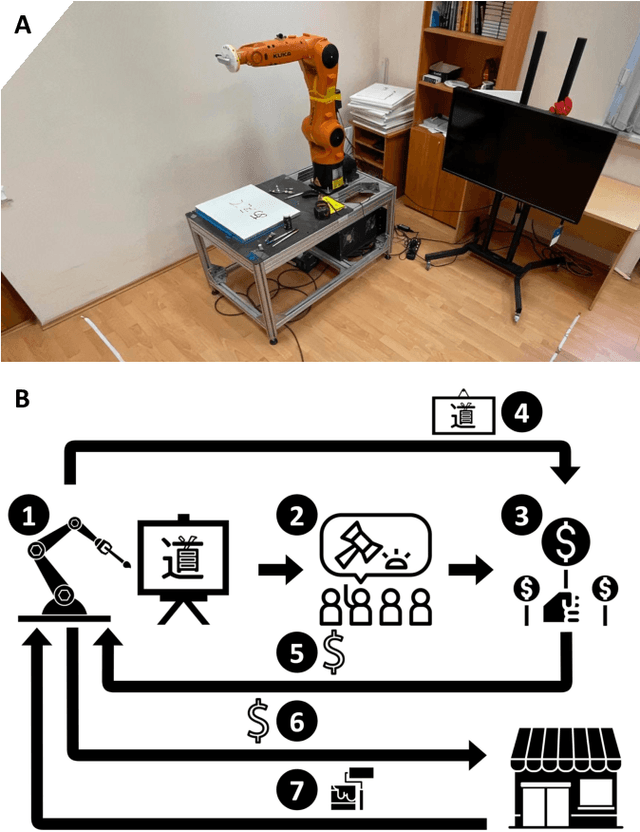

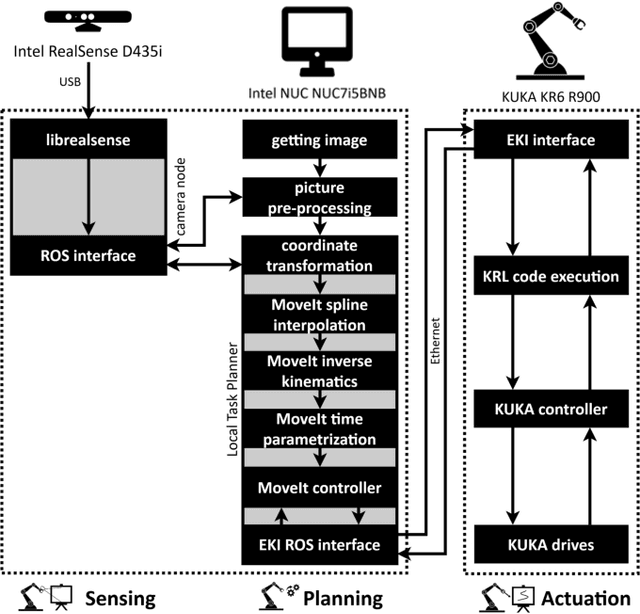
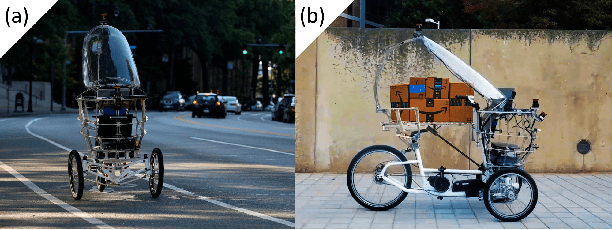
The physical autonomy of robots is well understood both theoretically and practically. By contrast, there is almost no research exploring their potential economic autonomy. In this paper, we present the first economically autonomous robot -- a robot able to produce marketable goods while having full control over the use of its generated income. Gaka-chu ("painter" in Japanese) is a 6-axis robot arm that creates artistic paintings of Japanese kanjis from an autoselected keyword. By using a blockchain-based smart contract, Gaka-chu can autonomously list a painting it made for sale in an online auction. In this transaction, the robot interacts with the human bidders as a peer not as a tool. Using the blockchain-based smart contract, Gaka-chu can then use its income from selling paintings to replenish its resources by autonomously ordering materials from an online art shop, and maintain its activity by remunerating a human assistant for manual tasks such as placing canvases. We built the Gaka-chu prototype with an Ethereum-based smart contract and ran a 6-month long experiment, during which the robot painted and sold four paintings one-by-one, simultaneously using its income to purchase art supplies, human assistance, and paid initial investors. In this work, we present the results of the experiments conducted and discuss the implications of economically autonomous robots.
Secure Encoded Instruction Graphs for End-to-End Data Validation in Autonomous Robots
Sep 02, 2020



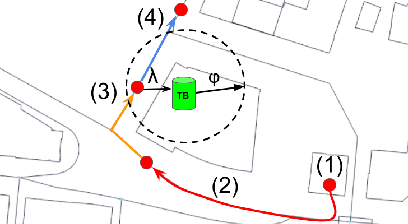
As autonomous robots become increasingly ubiquitous, more attention is being paid to the security of robotic operation. Autonomous robots can be seen as cyber-physical systems that transverse the virtual realm and operate in the human dimension. As a consequence, securing the operation of autonomous robots goes beyond securing data, from sensor input to mission instructions, towards securing the interaction with their environment. There is a lack of research towards methods that would allow a robot to ensure that both its sensors and actuators are operating correctly without external feedback. This paper introduces a robotic mission encoding method that serves as an end-to-end validation framework for autonomous robots. In particular, we put our framework into practice with a proof of concept describing a novel map encoding method that allows robots to navigate an objective environment with almost-zero a priori knowledge of it, and to validate operational instructions. We also demonstrate the applicability of our framework through experiments with real robots for two different map encoding methods. The encoded maps inherit all the advantages of traditional landmark-based navigation, with the addition of cryptographic hashes that enable end-to-end information validation. This end-to-end validation can be applied to virtually any aspect of robotic operation where there is a predefined set of operations or instructions given to the robot.
Secure and secret cooperation of robotic swarms by using Merkle trees
Apr 19, 2019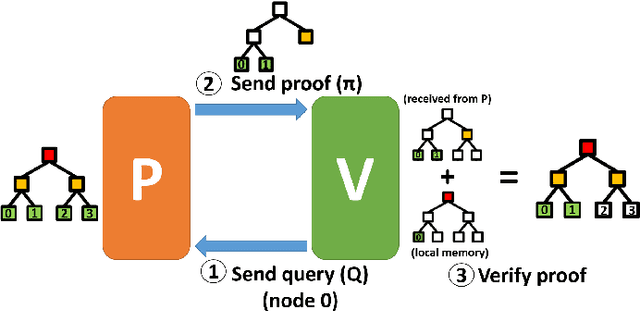
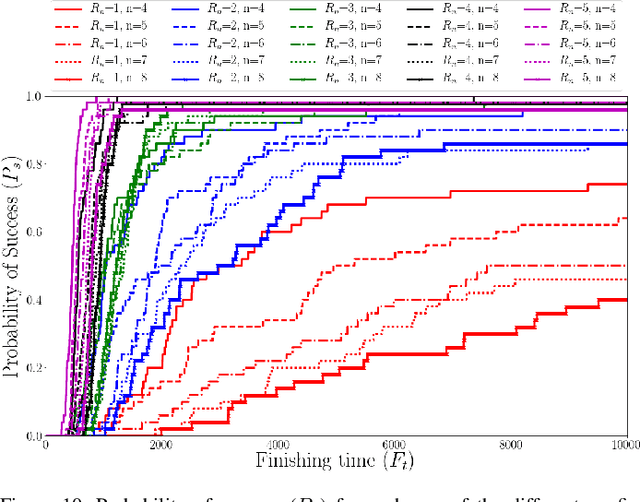
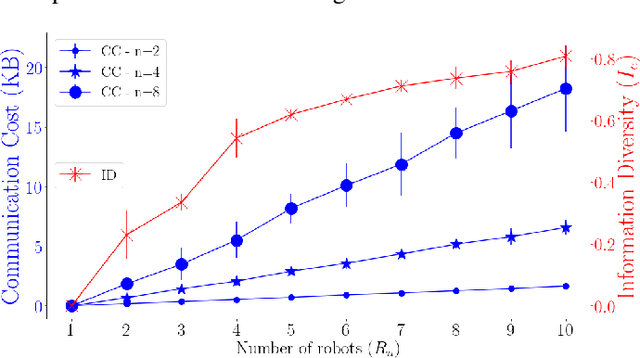
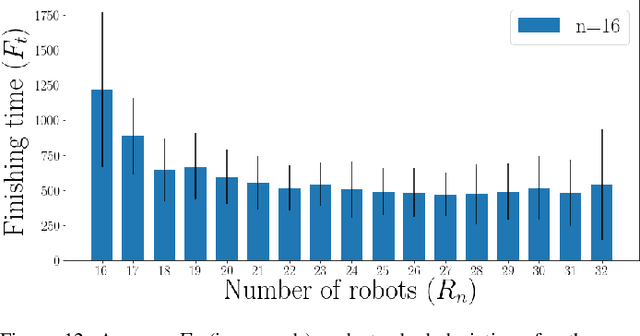
Swarm robotics systems are envisioned to become an important component of both academic research and real-world applications. However, in order to reach widespread adoption, new models that ensure the secure cooperation of these systems need to be developed. This work proposes a novel model to encapsulate cooperative robotic missions in Merkle trees, one of the fundamental components of blockchain technology. With the proposed model, swarm operators can provide the "blueprint" of the swarm's mission without disclosing raw data about the mission itself. In other words, data verification can be separated from data itself. We propose a system where swarm robots have to "prove" their integrity to their peers by exchanging cryptographic proofs. This work analyzes and tests the proposed approach for two different robotic missions: foraging (where robots modify the environment) and maze formation (where robots become part of the environment). In both missions, robots were able to cooperate and carry out sequential operations in the correct order without having explicit knowledge about the mission's high-level goals or objectives. The performance, communication costs, and information diversity requirements for the proposed approach are analyzed. Finally, conclusions are drawn and future work directions are suggested.
Urban Swarms: A new approach for autonomous waste management
Mar 01, 2019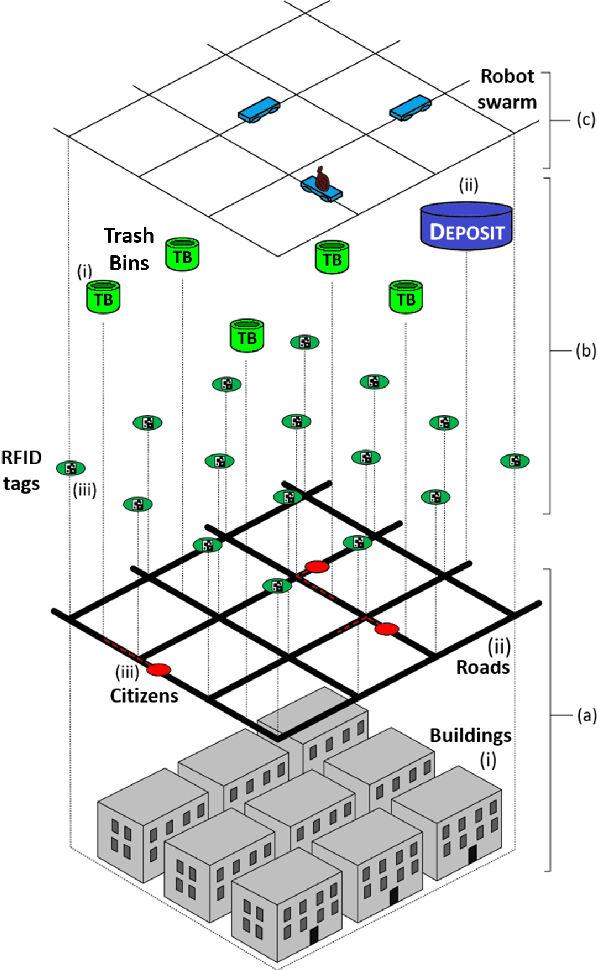
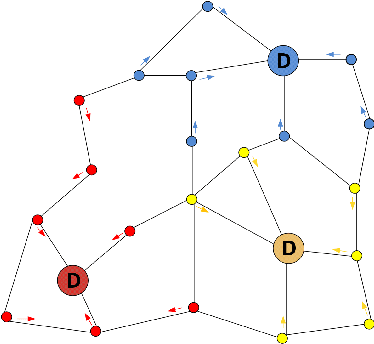
Modern cities are growing ecosystems that face new challenges due to the increasing population demands. One of the many problems they face nowadays is waste management, which has become a pressing issue requiring new solutions. Swarm robotics systems have been attracting an increasing amount of attention in the past years and they are expected to become one of the main driving factors for innovation in the field of robotics. The research presented in this paper explores the feasibility of a swarm robotics system in an urban environment. By using bio-inspired foraging methods such as multi-place foraging and stigmergy-based navigation, a swarm of robots is able to improve the efficiency and autonomy of the urban waste management system in a realistic scenario. To achieve this, a diverse set of simulation experiments was conducted using real-world GIS data and implementing different garbage collection scenarios driven by robot swarms. Results presented in this research show that the proposed system outperforms current approaches. Moreover, results not only show the efficiency of our solution, but also give insights about how to design and customize these systems.
RoboChain: A Secure Data-Sharing Framework for Human-Robot Interaction
Mar 26, 2018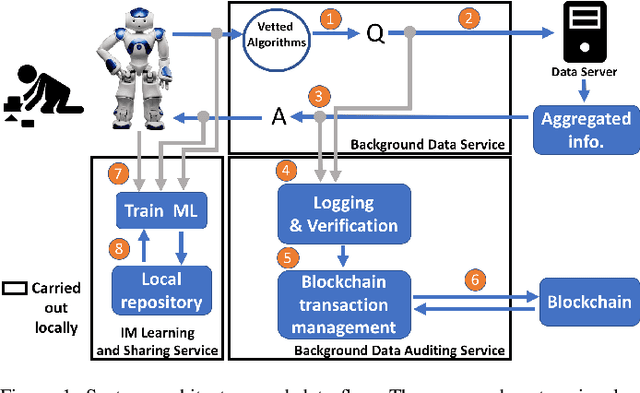
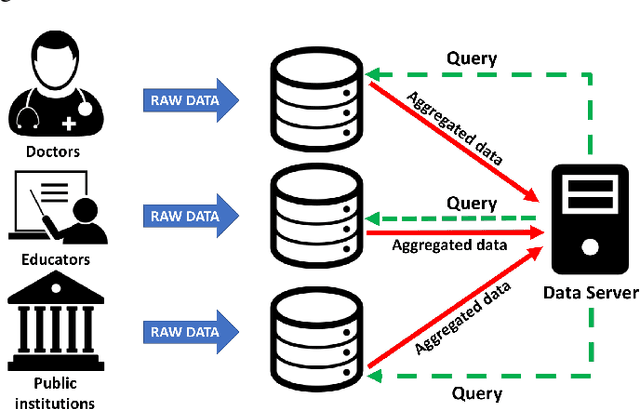
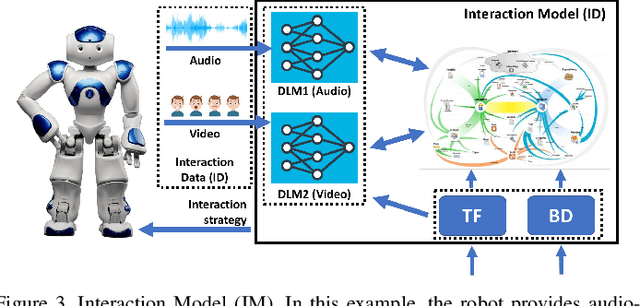
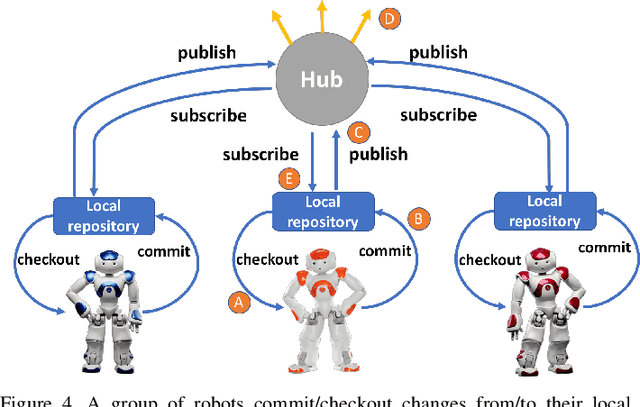
Robots have potential to revolutionize the way we interact with the world around us. One of their largest potentials is in the domain of mobile health where they can be used to facilitate clinical interventions. However, to accomplish this, robots need to have access to our private data in order to learn from these data and improve their interaction capabilities. Furthermore, to enhance this learning process, the knowledge sharing among multiple robot units is the natural step forward. However, to date, there is no well-established framework which allows for such data sharing while preserving the privacy of the users (e.g., the hospital patients). To this end, we introduce RoboChain - the first learning framework for secure, decentralized and computationally efficient data and model sharing among multiple robot units installed at multiple sites (e.g., hospitals). RoboChain builds upon and combines the latest advances in open data access and blockchain technologies, as well as machine learning. We illustrate this framework using the example of a clinical intervention conducted in a private network of hospitals. Specifically, we lay down the system architecture that allows multiple robot units, conducting the interventions at different hospitals, to perform efficient learning without compromising the data privacy.
The blockchain: a new framework for robotic swarm systems
Jun 25, 2017



Swarms of robots will revolutionize many industrial applications, from targeted material delivery to precision farming. However, several of the heterogeneous characteristics that make them ideal for certain future applications --- robot autonomy, decentralized control, collective emergent behavior, etc. --- hinder the evolution of the technology from academic institutions to real-world problems. Blockchain, an emerging technology originated in the Bitcoin field, demonstrates that by combining peer-to-peer networks with cryptographic algorithms a group of agents can reach an agreement on a particular state of affairs and record that agreement without the need for a controlling authority. The combination of blockchain with other distributed systems, such as robotic swarm systems, can provide the necessary capabilities to make robotic swarm operations more secure, autonomous, flexible and even profitable. This work explains how blockchain technology can provide innovative solutions to four emergent issues in the swarm robotics research field. New security, decision making, behavior differentiation and business models for swarm robotic systems are described by providing case scenarios and examples. Finally, limitations and possible future problems that arise from the combination of these two technologies are described.
A wearable general-purpose solution for Human-Swarm Interaction
Jun 24, 2017



Swarms of robots will revolutionize many industrial applications, from targeted material delivery to precision farming. Controlling the motion and behavior of these swarms presents unique challenges for human operators, who cannot yet effectively convey their high-level intentions to a group of robots in application. This work proposes a new human-swarm interface based on novel wearable gesture-control and haptic-feedback devices. This work seeks to combine a wearable gesture recognition device that can detect high-level intentions, a portable device that can detect Cartesian information and finger movements, and a wearable advanced haptic device that can provide real-time feedback. This project is the first to envisage a wearable Human-Swarm Interaction (HSI) interface that separates the input and feedback components of the classical control loop (input, output, feedback), as well as being the first of its kind suitable for both indoor and outdoor environments.
Personal Food Computer: A new device for controlled-environment agriculture
Jun 24, 2017



Due to their interdisciplinary nature, devices for controlled-environment agriculture have the possibility to turn into ideal tools not only to conduct research on plant phenology but also to create curricula in a wide range of disciplines. Controlled-environment devices are increasing their functionalities as well as improving their accessibility. Traditionally, building one of these devices from scratch implies knowledge in fields such as mechanical engineering, digital electronics, programming, and energy management. However, the requirements of an effective controlled environment device for personal use brings new constraints and challenges. This paper presents the OpenAg Personal Food Computer (PFC); a low cost desktop size platform, which not only targets plant phenology researchers but also hobbyists, makers, and teachers from elementary to high-school levels (K-12). The PFC is completely open-source and it is intended to become a tool that can be used for collective data sharing and plant growth analysis. Thanks to its modular design, the PFC can be used in a large spectrum of activities.