 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAuthenticated Delegation and Authorized AI Agents
Jan 16, 2025



The rapid deployment of autonomous AI agents creates urgent challenges around authorization, accountability, and access control in digital spaces. New standards are needed to know whom AI agents act on behalf of and guide their use appropriately, protecting online spaces while unlocking the value of task delegation to autonomous agents. We introduce a novel framework for authenticated, authorized, and auditable delegation of authority to AI agents, where human users can securely delegate and restrict the permissions and scope of agents while maintaining clear chains of accountability. This framework builds on existing identification and access management protocols, extending OAuth 2.0 and OpenID Connect with agent-specific credentials and metadata, maintaining compatibility with established authentication and web infrastructure. Further, we propose a framework for translating flexible, natural language permissions into auditable access control configurations, enabling robust scoping of AI agent capabilities across diverse interaction modalities. Taken together, this practical approach facilitates immediate deployment of AI agents while addressing key security and accountability concerns, working toward ensuring agentic AI systems perform only appropriate actions and providing a tool for digital service providers to enable AI agent interactions without risking harm from scalable interaction.
Secure and secret cooperation of robotic swarms by using Merkle trees
Apr 19, 2019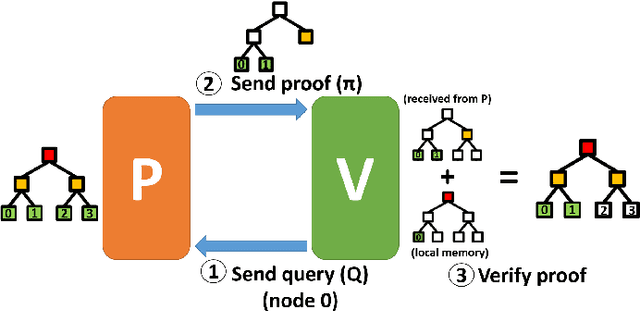
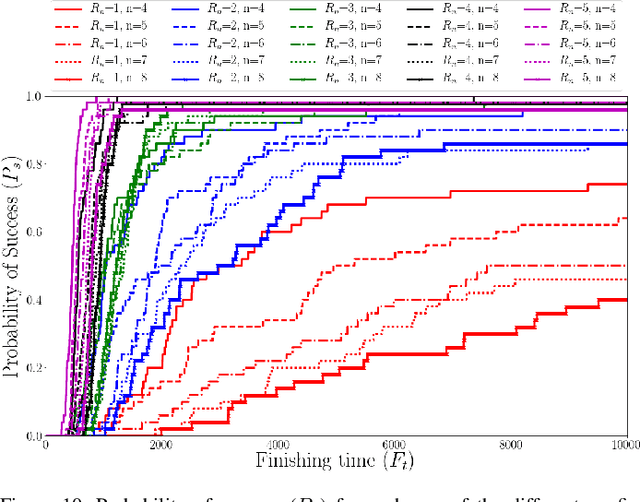
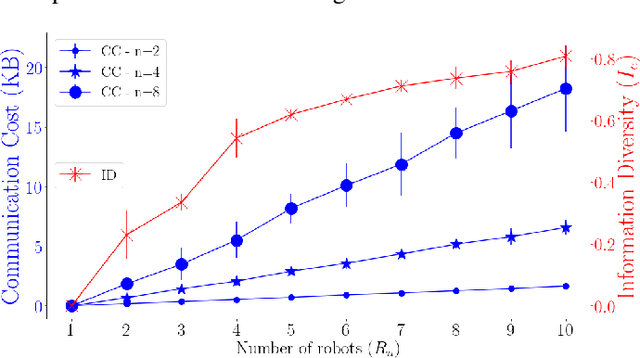
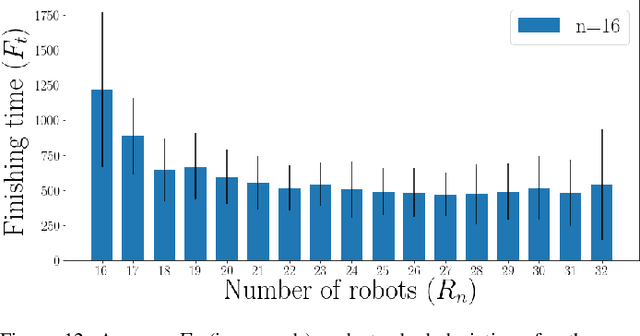
Swarm robotics systems are envisioned to become an important component of both academic research and real-world applications. However, in order to reach widespread adoption, new models that ensure the secure cooperation of these systems need to be developed. This work proposes a novel model to encapsulate cooperative robotic missions in Merkle trees, one of the fundamental components of blockchain technology. With the proposed model, swarm operators can provide the "blueprint" of the swarm's mission without disclosing raw data about the mission itself. In other words, data verification can be separated from data itself. We propose a system where swarm robots have to "prove" their integrity to their peers by exchanging cryptographic proofs. This work analyzes and tests the proposed approach for two different robotic missions: foraging (where robots modify the environment) and maze formation (where robots become part of the environment). In both missions, robots were able to cooperate and carry out sequential operations in the correct order without having explicit knowledge about the mission's high-level goals or objectives. The performance, communication costs, and information diversity requirements for the proposed approach are analyzed. Finally, conclusions are drawn and future work directions are suggested.
RoboChain: A Secure Data-Sharing Framework for Human-Robot Interaction
Mar 26, 2018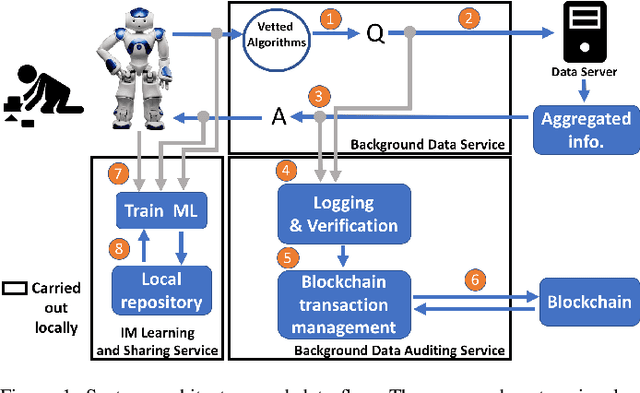
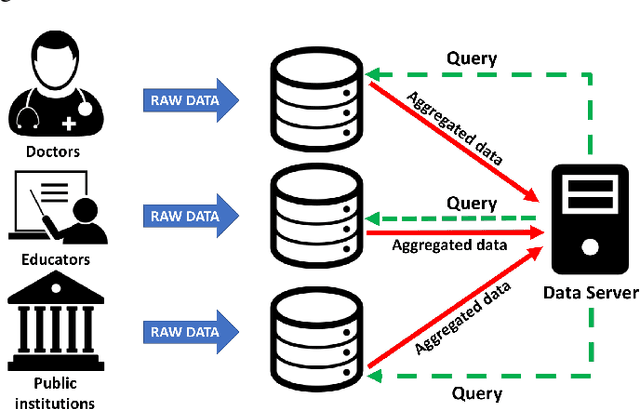
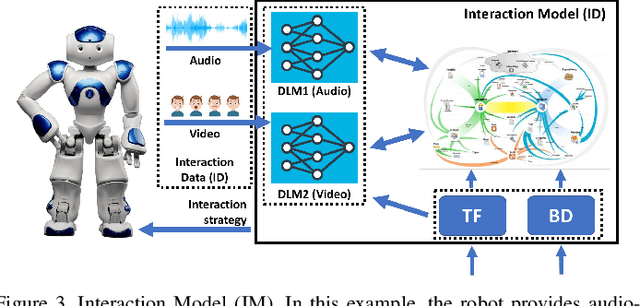
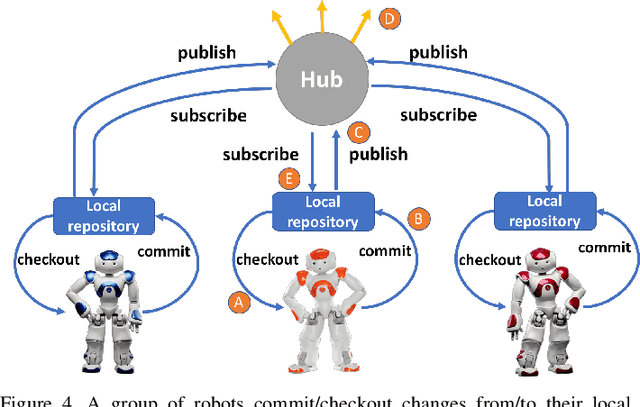
Robots have potential to revolutionize the way we interact with the world around us. One of their largest potentials is in the domain of mobile health where they can be used to facilitate clinical interventions. However, to accomplish this, robots need to have access to our private data in order to learn from these data and improve their interaction capabilities. Furthermore, to enhance this learning process, the knowledge sharing among multiple robot units is the natural step forward. However, to date, there is no well-established framework which allows for such data sharing while preserving the privacy of the users (e.g., the hospital patients). To this end, we introduce RoboChain - the first learning framework for secure, decentralized and computationally efficient data and model sharing among multiple robot units installed at multiple sites (e.g., hospitals). RoboChain builds upon and combines the latest advances in open data access and blockchain technologies, as well as machine learning. We illustrate this framework using the example of a clinical intervention conducted in a private network of hospitals. Specifically, we lay down the system architecture that allows multiple robot units, conducting the interventions at different hospitals, to perform efficient learning without compromising the data privacy.