 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaka-chu: a self-employed autonomous robot artist
Mar 07, 2022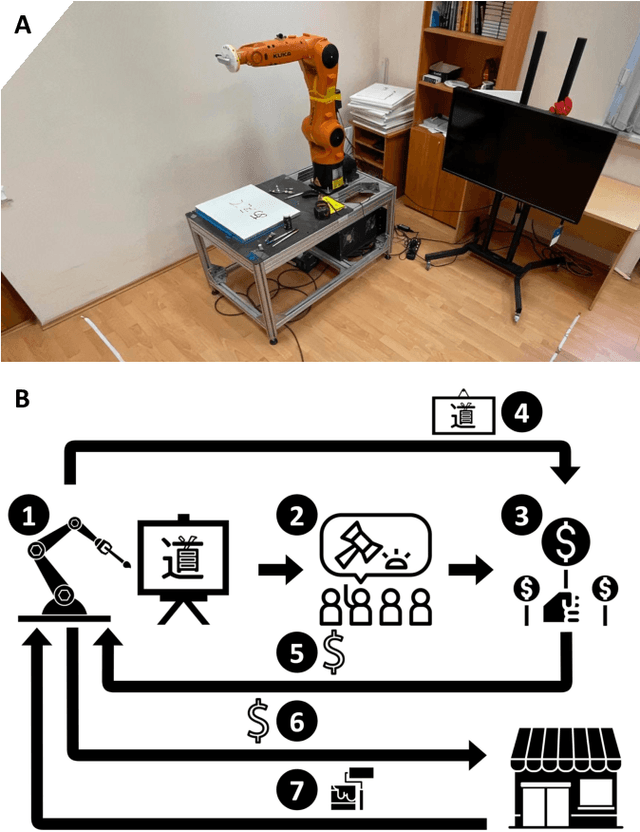

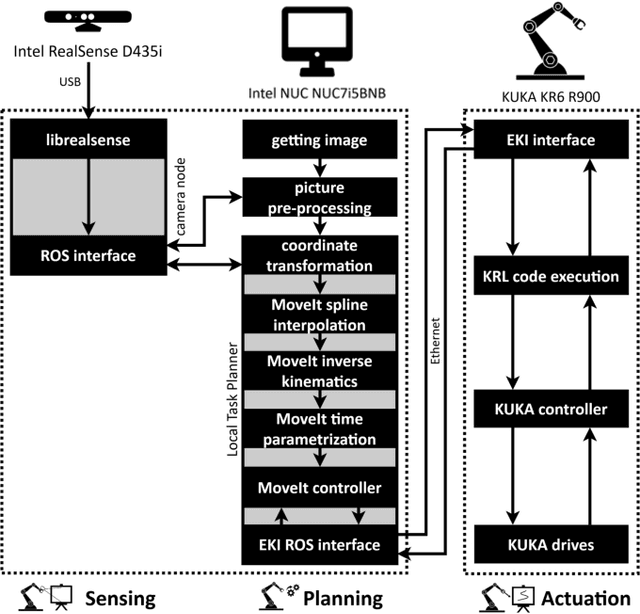
The physical autonomy of robots is well understood both theoretically and practically. By contrast, there is almost no research exploring their potential economic autonomy. In this paper, we present the first economically autonomous robot -- a robot able to produce marketable goods while having full control over the use of its generated income. Gaka-chu ("painter" in Japanese) is a 6-axis robot arm that creates artistic paintings of Japanese kanjis from an autoselected keyword. By using a blockchain-based smart contract, Gaka-chu can autonomously list a painting it made for sale in an online auction. In this transaction, the robot interacts with the human bidders as a peer not as a tool. Using the blockchain-based smart contract, Gaka-chu can then use its income from selling paintings to replenish its resources by autonomously ordering materials from an online art shop, and maintain its activity by remunerating a human assistant for manual tasks such as placing canvases. We built the Gaka-chu prototype with an Ethereum-based smart contract and ran a 6-month long experiment, during which the robot painted and sold four paintings one-by-one, simultaneously using its income to purchase art supplies, human assistance, and paid initial investors. In this work, we present the results of the experiments conducted and discuss the implications of economically autonomous robots.
Towards Blockchain-based Multi-Agent Robotic Systems: Analysis, Classification and Applications
Jul 17, 2019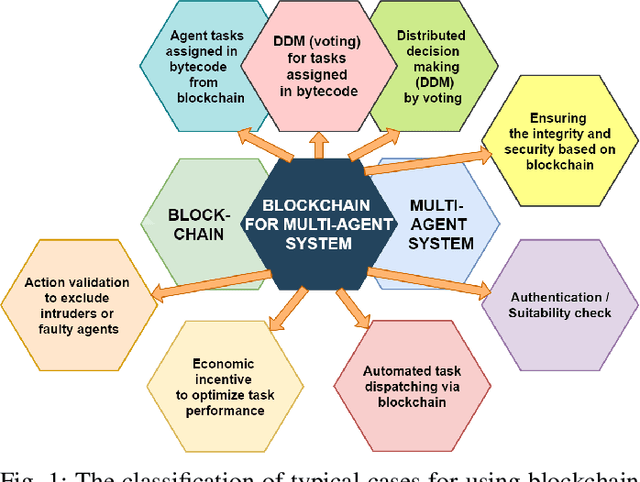
Decentralization, immutability and transparency make of Blockchain one of the most innovative technology of recent years. This paper presents an overview of solutions based on Blockchain technology for multi-agent robotic systems, and provide an analysis and classification of this emerging field. The reasons for implementing Blockchain in a multi-robot network may be to increase the interaction efficiency between agents by providing more trusted information exchange, reaching a consensus in trustless conditions, assessing robot productivity or detecting performance problems, identifying intruders, allocating plans and tasks, deploying distributed solutions and joint missions. Blockchain-based applications are discussed to demonstrate how distributed ledger can be used to extend the number of research platforms and libraries for multi-agent robotic systems.