 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparison of Various SLAM Systems for Mobile Robot in an Indoor Environment
Jan 16, 2025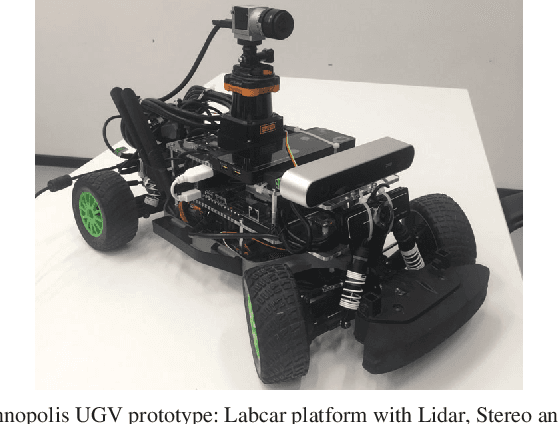
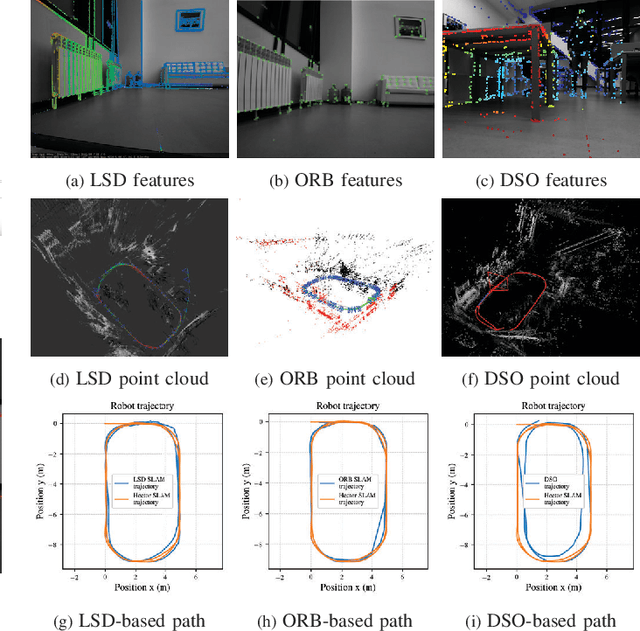
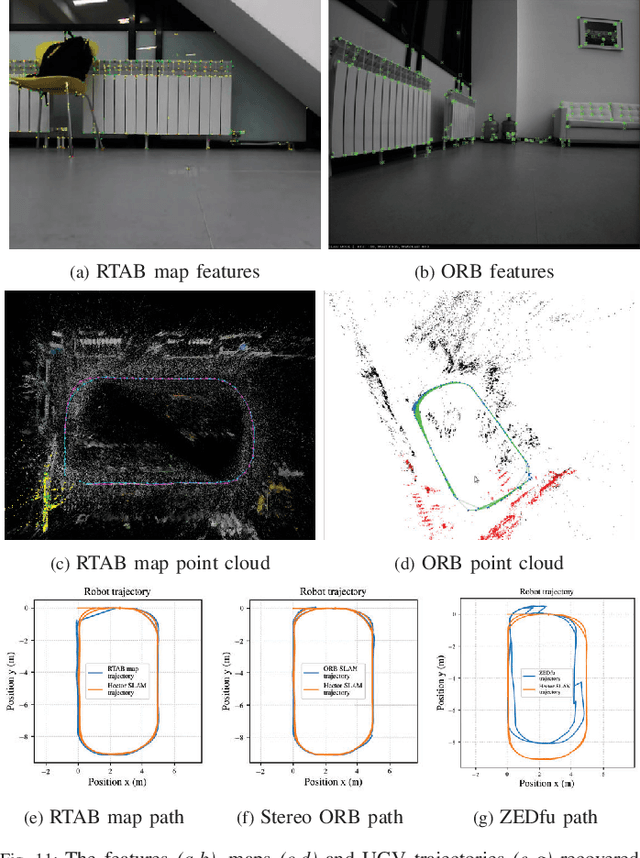
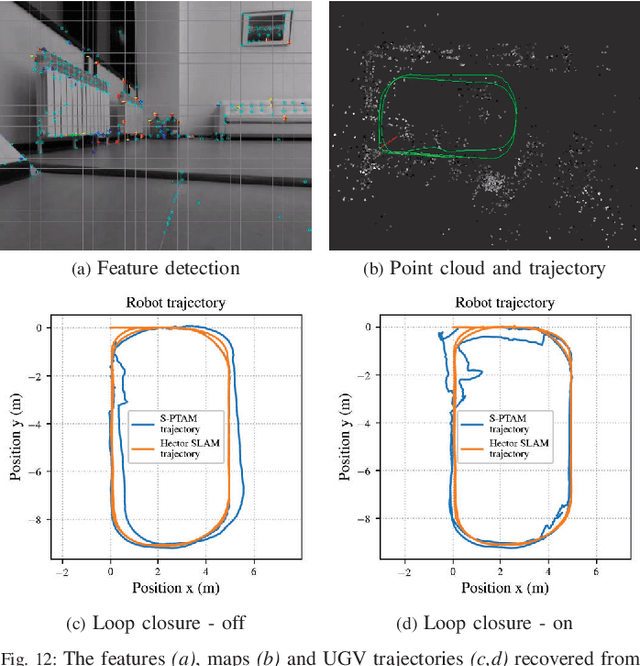
This article presents a comparative analysis of a mobile robot trajectories computed by various ROS-based SLAM systems. For this reason we developed a prototype of a mobile robot with common sensors: 2D lidar, a monocular and ZED stereo cameras. Then we conducted experiments in a typical office environment and collected data from all sensors, running all tested SLAM systems based on the acquired dataset. We studied the following SLAM systems: (a) 2D lidar-based: GMapping, Hector SLAM, Cartographer; (b) monocular camera-based: Large Scale Direct monocular SLAM (LSD SLAM), ORB SLAM, Direct Sparse Odometry (DSO); and (c) stereo camera-based: ZEDfu, Real-Time Appearance-Based Mapping (RTAB map), ORB SLAM, Stereo Parallel Tracking and Mapping (S-PTAM). Since all SLAM methods were tested on the same dataset we compared results for different SLAM systems with appropriate metrics, demonstrating encouraging results for lidar-based Cartographer SLAM, Monocular ORB SLAM and Stereo RTAB Map methods.
Depth and Image Fusion for Road Obstacle Detection Using Stereo Camera
Jan 13, 2025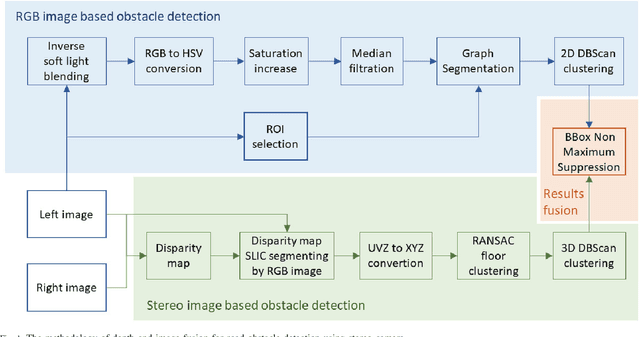
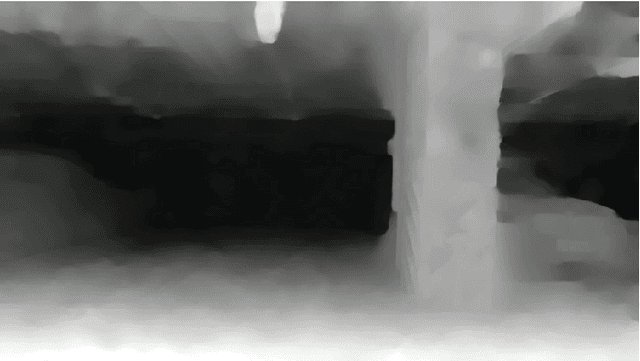
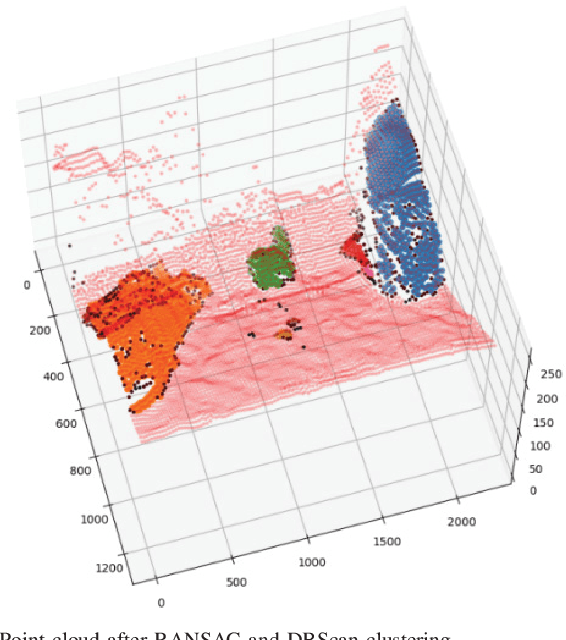
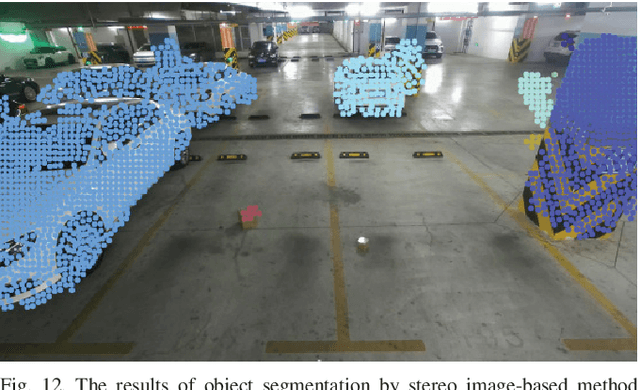
This paper is devoted to the detection of objects on a road, performed with a combination of two methods based on both the use of depth information and video analysis of data from a stereo camera. Since neither the time of the appearance of an object on the road, nor its size and shape is known in advance, ML/DL-based approaches are not applicable. The task becomes more complicated due to variations in artificial illumination, inhomogeneous road surface texture, and unknown character and features of the object. To solve this problem we developed the depth and image fusion method that complements a search of small contrast objects by RGB-based method, and obstacle detection by stereo image-based approach with SLIC superpixel segmentation. We conducted experiments with static and low speed obstacles in an underground parking lot and demonstrated the successful work of the developed technique for detecting and even tracking small objects, which can be parking infrastructure objects, things left on the road, wheels, dropped boxes, etc.
Geometry Restoration and Dewarping of Camera-Captured Document Images
Jan 06, 2025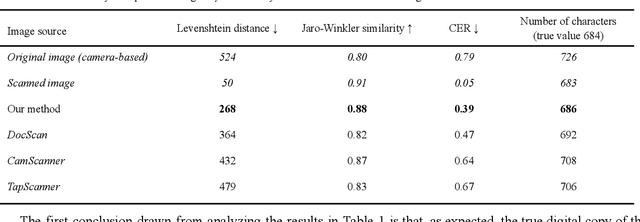

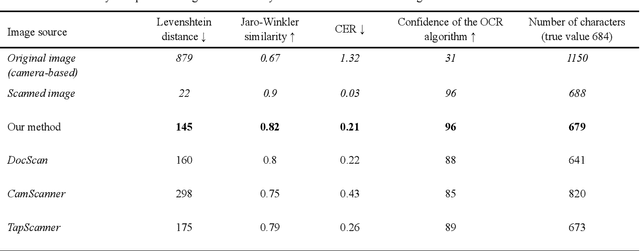
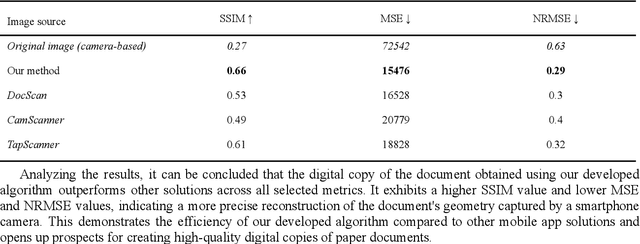
This research focuses on developing a method for restoring the topology of digital images of paper documents captured by a camera, using algorithms for detection, segmentation, geometry restoration, and dewarping. Our methodology employs deep learning (DL) for document outline detection, followed by computer vision (CV) to create a topological 2D grid using cubic polynomial interpolation and correct nonlinear distortions by remapping the image. Using classical CV methods makes the document topology restoration process more efficient and faster, as it requires significantly fewer computational resources and memory. We developed a new pipeline for automatic document dewarping and reconstruction, along with a framework and annotated dataset to demonstrate its efficiency. Our experiments confirm the promise of our methodology and its superiority over existing benchmarks (including mobile apps and popular DL solutions, such as RectiNet, DocGeoNet, and DocTr++) both visually and in terms of document readability via Optical Character Recognition (OCR) and geometry restoration metrics. This paves the way for creating high-quality digital copies of paper documents and enhancing the efficiency of OCR systems. Project page: https://github.com/HorizonParadox/DRCCBI
Towards Blockchain-based Multi-Agent Robotic Systems: Analysis, Classification and Applications
Jul 17, 2019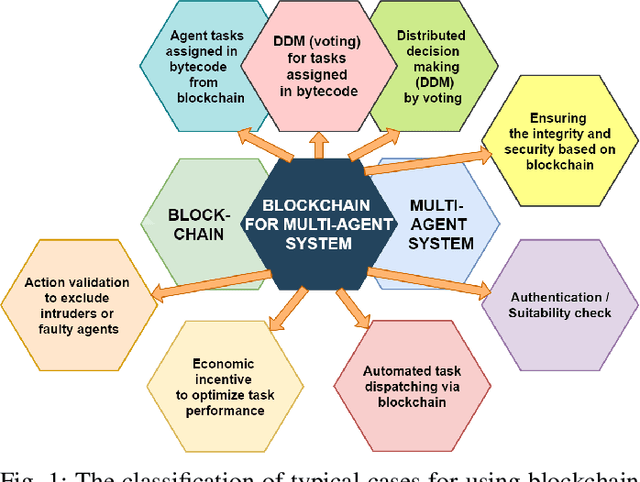
Decentralization, immutability and transparency make of Blockchain one of the most innovative technology of recent years. This paper presents an overview of solutions based on Blockchain technology for multi-agent robotic systems, and provide an analysis and classification of this emerging field. The reasons for implementing Blockchain in a multi-robot network may be to increase the interaction efficiency between agents by providing more trusted information exchange, reaching a consensus in trustless conditions, assessing robot productivity or detecting performance problems, identifying intruders, allocating plans and tasks, deploying distributed solutions and joint missions. Blockchain-based applications are discussed to demonstrate how distributed ledger can be used to extend the number of research platforms and libraries for multi-agent robotic systems.
Towards the Internet of Robotic Things: Analysis, Architecture, Components and Challenges
Jul 08, 2019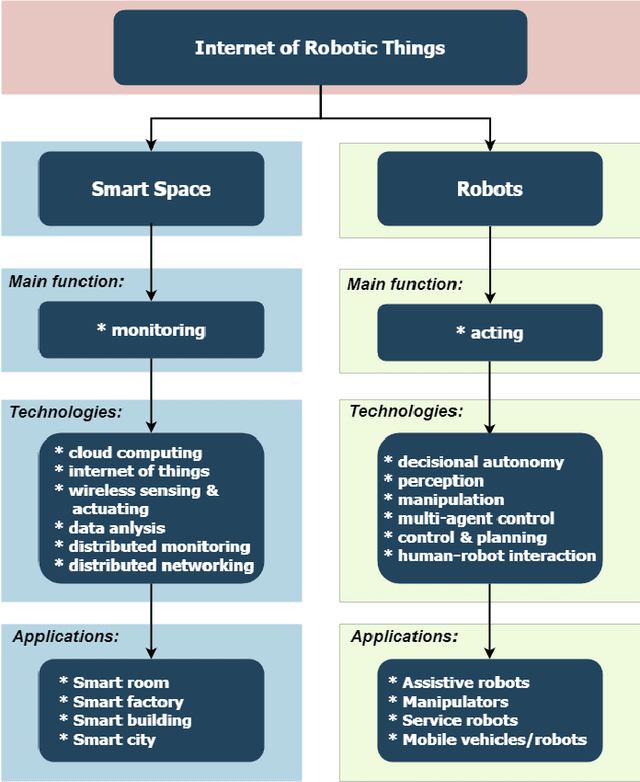
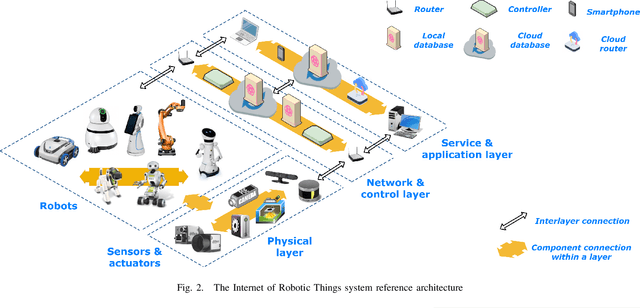
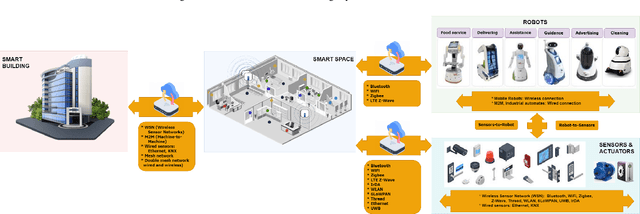
Internet of Things (IoT) and robotics cannot be considered two separate domains these days. Internet of Robotics Things (IoRT) is a concept that has been recently introduced to describe the integration of robotics technologies in IoT scenarios. As a consequence, these two research fields have started interacting, and thus linking research communities. In this paper we intend to make further steps in joining the two communities and broaden the discussion on the development of this interdisciplinary field. The paper provides an overview, analysis and challenges of possible solutions for the Internet of Robotic Things, discussing the issues of the IoRT architecture, the integration of smart spaces and robotic applications.
Ground Profile Recovery from Aerial 3D LiDAR-based Maps
Mar 26, 2019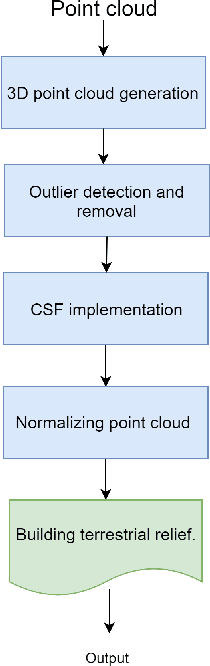
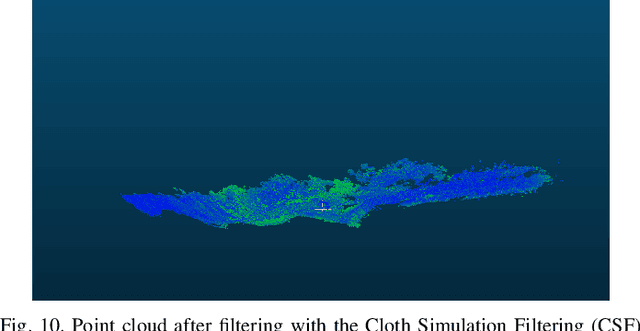
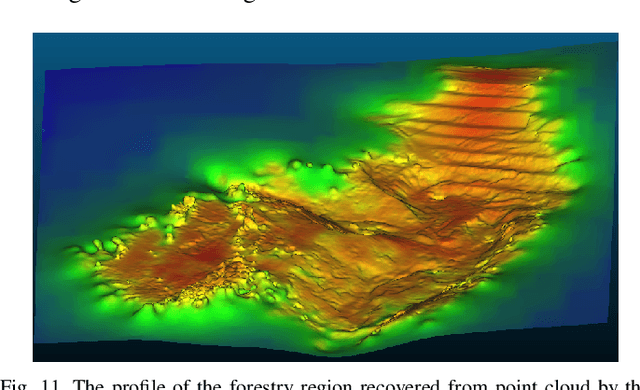
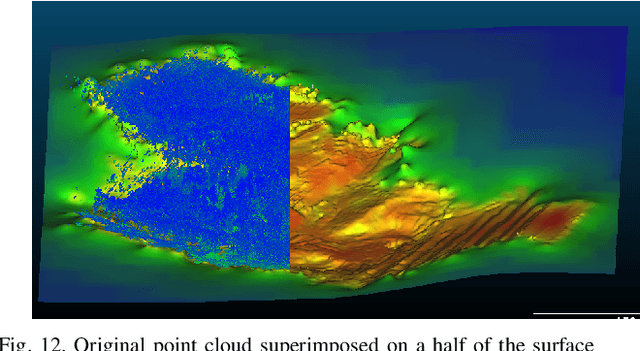
The paper presents the study and implementation of the ground detection methodology with filtration and removal of forest points from LiDAR-based 3D point cloud using the Cloth Simulation Filtering (CSF) algorithm. The methodology allows to recover a terrestrial relief and create a landscape map of a forestry region. As the proof-of-concept, we provided the outdoor flight experiment, launching a hexacopter under a mixed forestry region with sharp ground changes nearby Innopolis city (Russia), which demonstrated the encouraging results for both ground detection and methodology robustness.
Blockchain Solutions for Multi-Agent Robotic Systems: Related Work and Open Questions
Mar 26, 2019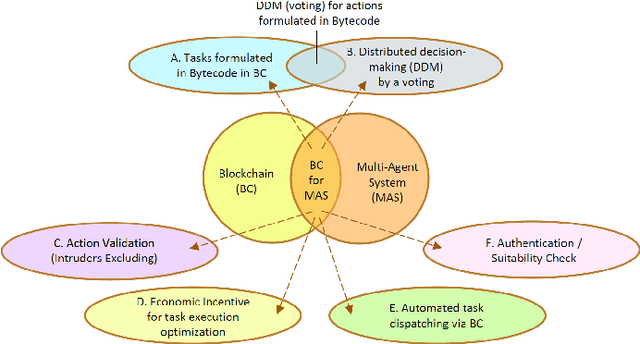
The possibilities of decentralization and immutability make blockchain probably one of the most breakthrough and promising technological innovations in recent years. This paper presents an overview, analysis, and classification of possible blockchain solutions for practical tasks facing multi-agent robotic systems. The paper discusses blockchain-based applications that demonstrate how distributed ledger can be used to extend the existing number of research platforms and libraries for multi-agent robotic systems.
Deep Learning Approach for Building Detection in Satellite Multispectral Imagery
Nov 10, 2018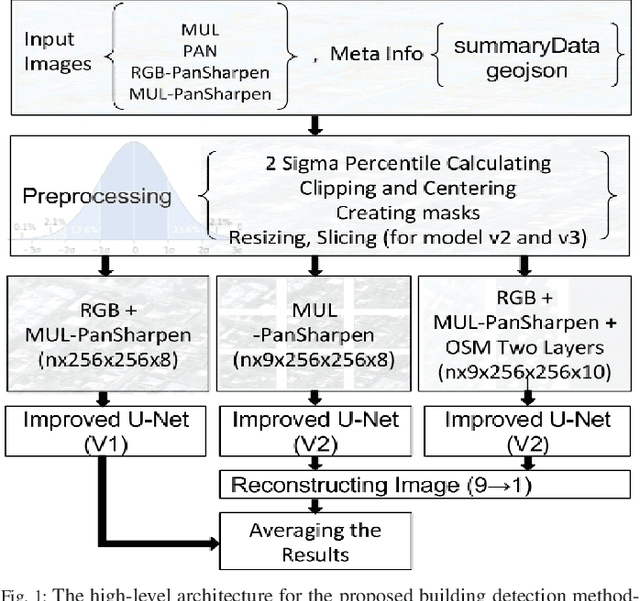


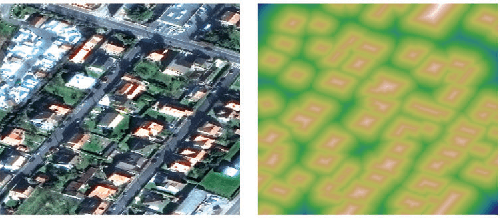
Building detection from satellite multispectral imagery data is being a fundamental but a challenging problem mainly because it requires correct recovery of building footprints from high-resolution images. In this work, we propose a deep learning approach for building detection by applying numerous enhancements throughout the process. Initial dataset is preprocessed by 2-sigma percentile normalization. Then data preparation includes ensemble modelling where 3 models were created while incorporating OpenStreetMap data. Binary Distance Transformation (BDT) is used for improving data labeling process and the U-Net (Convolutional Networks for Biomedical Image Segmentation) is modified by adding batch normalization wrappers. Afterwards, it is explained how each component of our approach is correlated with the final detection accuracy. Finally, we compare our results with winning solutions of SpaceNet 2 competition for real satellite multispectral images of Vegas, Paris, Shanghai and Khartoum, demonstrating the importance of our solution for achieving higher building detection accuracy.
Towards Human Pulse Rate Estimation from Face Video: Automatic Component Selection and Comparison of Blind Source Separation Methods
Oct 28, 2018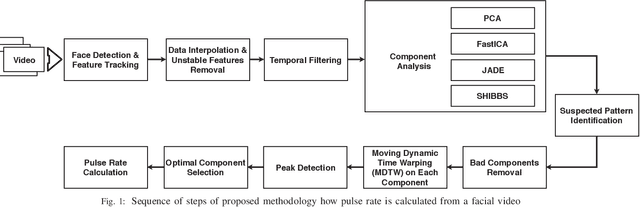
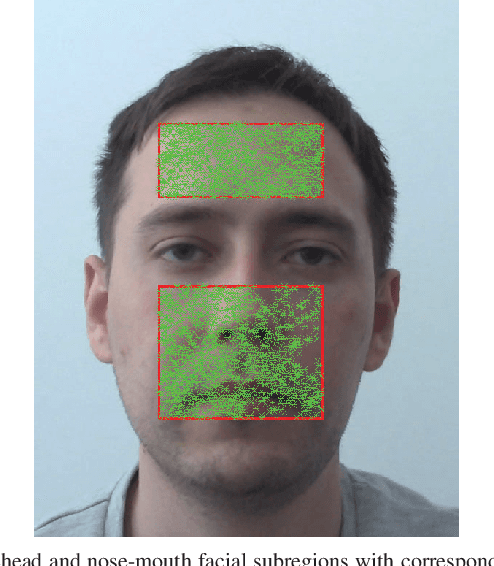

Human heartbeat can be measured using several different ways appropriately based on the patient condition which includes contact base such as measured by using instruments and non-contact base such as computer vision assisted techniques. Non-contact based approached are getting popular due to those techniques are capable of mitigating some of the limitations of contact-based techniques especially in clinical section. However, existing vision guided approaches are not able to prove high accurate result due to various reason such as the property of camera, illumination changes, skin tones in face image, etc. We propose a technique that uses video as an input and returns pulse rate in output. Initially, key point detection is carried out on two facial subregions: forehead and nose-mouth. After removing unstable features, the temporal filtering is applied to isolate frequencies of interest. Then four component analysis methods are employed in order to distinguish the cardiovascular pulse signal from extraneous noise caused by respiration, vestibular activity and other changes in facial expression. Afterwards, proposed peak detection technique is applied for each component which extracted from one of the four different component selection algorithms. This will enable to locate the positions of peaks in each component. Proposed automatic components selection technique is employed in order to select an optimal component which will be used to calculate the heartbeat. Finally, we conclude with a comparison of four component analysis methods (PCA, FastICA, JADE, SHIBBS), processing face video datasets of fifteen volunteers with verification by an ECG/EKG Workstation as a ground truth.
Towards blockchain-based robonomics: autonomous agents behavior validation
May 08, 2018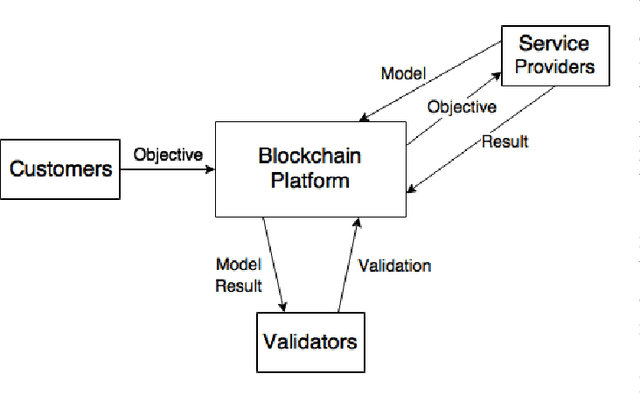
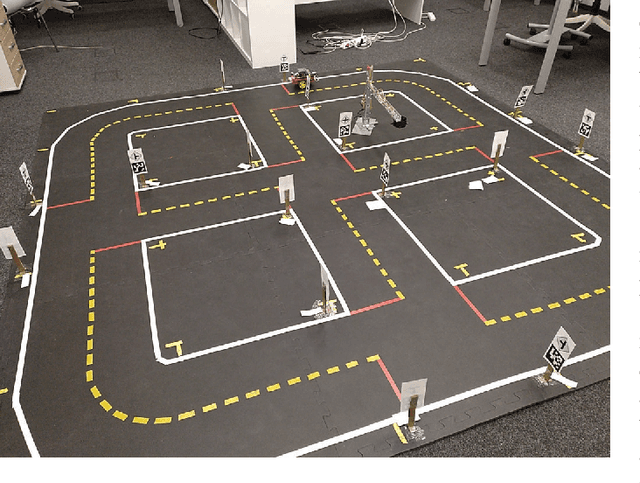
The decentralized trading market approach, where both autonomous agents and people can consume and produce services expanding own opportunities to reach goals, looks very promising as a part of the Fourth Industrial revolution. The key component of the approach is a blockchain platform that allows an interaction between agents via liability smart contracts. Reliability of a service provider is usually determined by a reputation model. However, this solution only warns future customers about an extent of trust to the service provider in case it could not execute any previous liabilities correctly. From the other hand a blockchain consensus protocol can additionally include a validation procedure that detects incorrect liability executions in order to suspend payment transactions to questionable service providers. The paper presents the validation methodology of a liability execution for agent-based service providers in a decentralized trading market, using the Model Checking method based on the mathematical model of finite state automata and Temporal Logic properties of interest. To demonstrate this concept, we implemented the methodology in the Duckietown application, moving an autonomous mobile robot to achieve a mission goal with the following behavior validation at the end of a completed scenario.