 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign Perspectives of Multitask Deep Learning Models and Applications
Sep 27, 2022In recent years, multi-task learning has turned out to be of great success in various applications. Though single model training has promised great results throughout these years, it ignores valuable information that might help us estimate a metric better. Under learning-related tasks, multi-task learning has been able to generalize the models even better. We try to enhance the feature mapping of the multi-tasking models by sharing features among related tasks and inductive transfer learning. Also, our interest is in learning the task relationships among various tasks for acquiring better benefits from multi-task learning. In this chapter, our objective is to visualize the existing multi-tasking models, compare their performances, the methods used to evaluate the performance of the multi-tasking models, discuss the problems faced during the design and implementation of these models in various domains, and the advantages and milestones achieved by them
Towards Blockchain-based Multi-Agent Robotic Systems: Analysis, Classification and Applications
Jul 17, 2019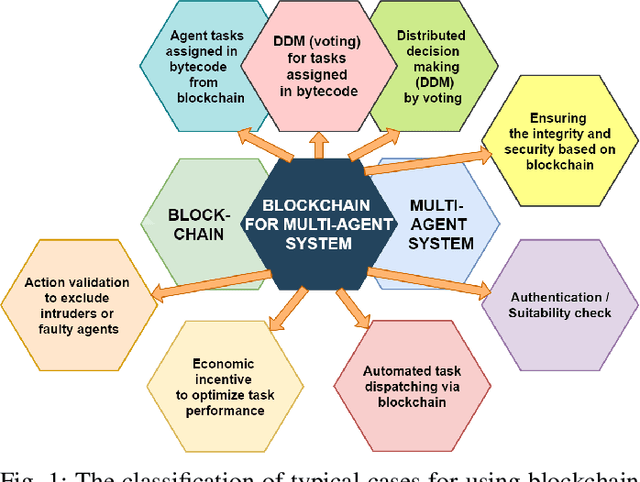
Decentralization, immutability and transparency make of Blockchain one of the most innovative technology of recent years. This paper presents an overview of solutions based on Blockchain technology for multi-agent robotic systems, and provide an analysis and classification of this emerging field. The reasons for implementing Blockchain in a multi-robot network may be to increase the interaction efficiency between agents by providing more trusted information exchange, reaching a consensus in trustless conditions, assessing robot productivity or detecting performance problems, identifying intruders, allocating plans and tasks, deploying distributed solutions and joint missions. Blockchain-based applications are discussed to demonstrate how distributed ledger can be used to extend the number of research platforms and libraries for multi-agent robotic systems.
Towards the Internet of Robotic Things: Analysis, Architecture, Components and Challenges
Jul 08, 2019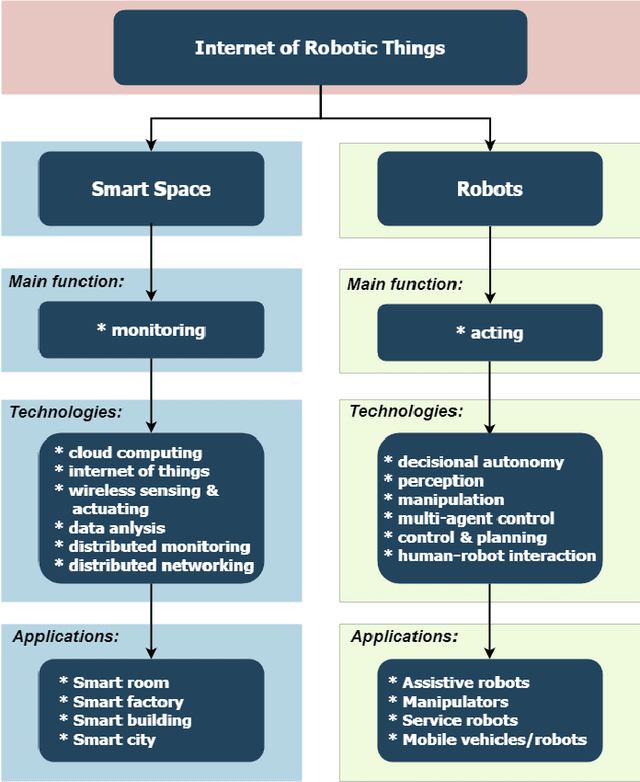
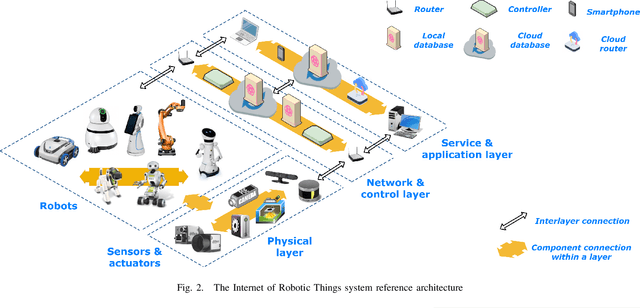
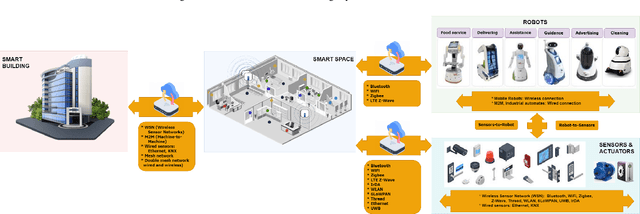
Internet of Things (IoT) and robotics cannot be considered two separate domains these days. Internet of Robotics Things (IoRT) is a concept that has been recently introduced to describe the integration of robotics technologies in IoT scenarios. As a consequence, these two research fields have started interacting, and thus linking research communities. In this paper we intend to make further steps in joining the two communities and broaden the discussion on the development of this interdisciplinary field. The paper provides an overview, analysis and challenges of possible solutions for the Internet of Robotic Things, discussing the issues of the IoRT architecture, the integration of smart spaces and robotic applications.