 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetecting AutoEncoder is Enough to Catch LDM Generated Images
Nov 10, 2024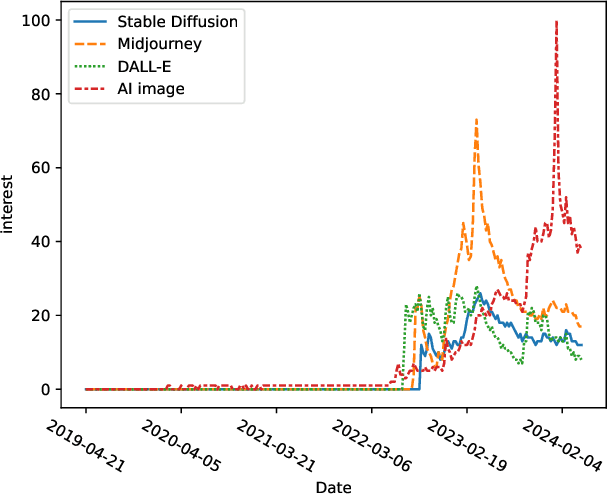



In recent years, diffusion models have become one of the main methods for generating images. However, detecting images generated by these models remains a challenging task. This paper proposes a novel method for detecting images generated by Latent Diffusion Models (LDM) by identifying artifacts introduced by their autoencoders. By training a detector to distinguish between real images and those reconstructed by the LDM autoencoder, the method enables detection of generated images without directly training on them. The novelty of this research lies in the fact that, unlike similar approaches, this method does not require training on synthesized data, significantly reducing computational costs and enhancing generalization ability. Experimental results show high detection accuracy with minimal false positives, making this approach a promising tool for combating fake images.
Towards Blockchain-based Multi-Agent Robotic Systems: Analysis, Classification and Applications
Jul 17, 2019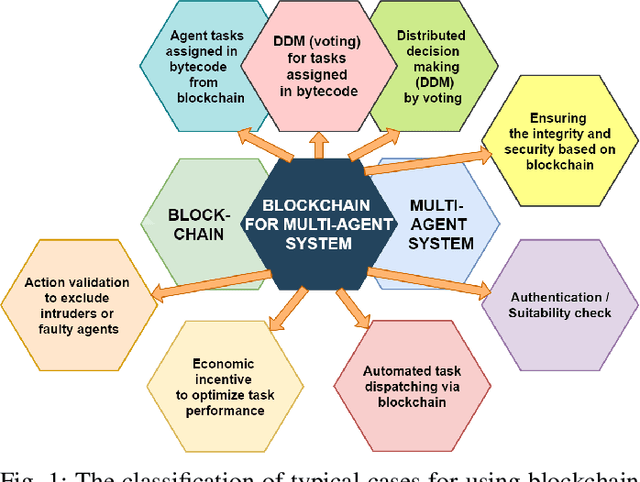
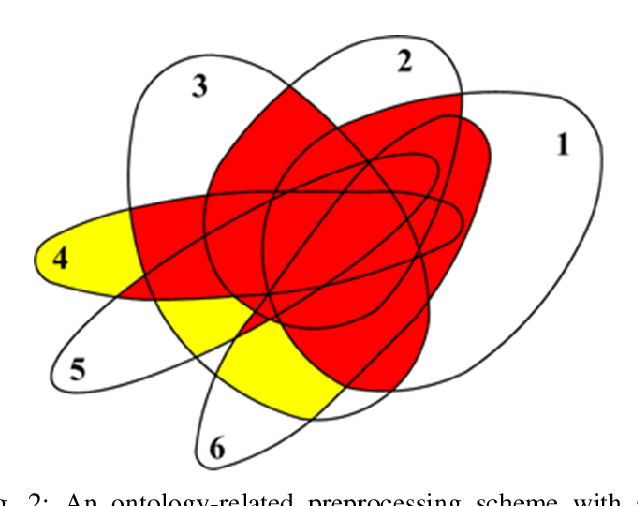
Decentralization, immutability and transparency make of Blockchain one of the most innovative technology of recent years. This paper presents an overview of solutions based on Blockchain technology for multi-agent robotic systems, and provide an analysis and classification of this emerging field. The reasons for implementing Blockchain in a multi-robot network may be to increase the interaction efficiency between agents by providing more trusted information exchange, reaching a consensus in trustless conditions, assessing robot productivity or detecting performance problems, identifying intruders, allocating plans and tasks, deploying distributed solutions and joint missions. Blockchain-based applications are discussed to demonstrate how distributed ledger can be used to extend the number of research platforms and libraries for multi-agent robotic systems.