 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Planning Followed by Kinodynamic Smoothing for Multirotor Aerial Vehicles (MAVs)
Aug 29, 2020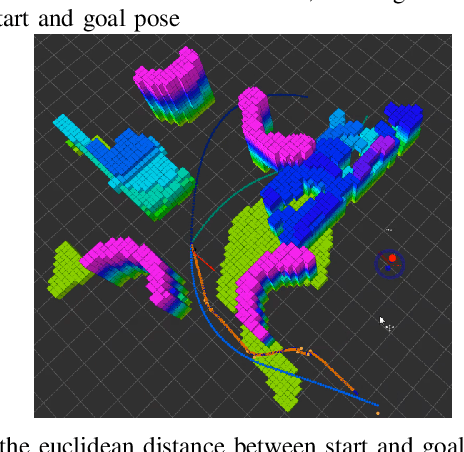
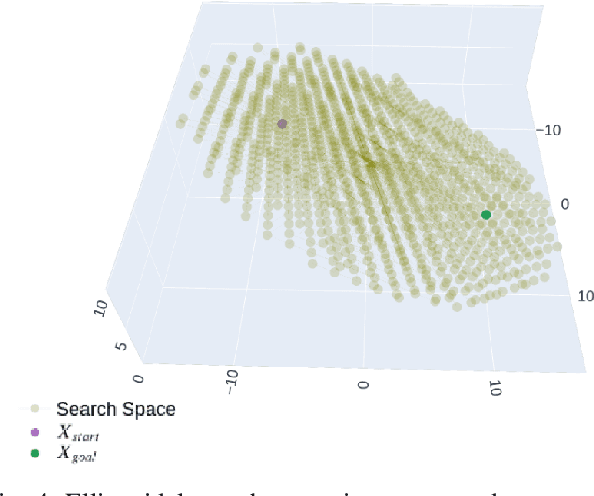
We explore path planning followed by kinodynamic smoothing while ensuring the vehicle dynamics feasibility for MAVs. We have chosen a geometrically based motion planning technique \textquotedblleft RRT*\textquotedblright\; for this purpose. In the proposed technique, we modified original RRT* introducing an adaptive search space and a steering function which help to increase the consistency of the planner. Moreover, we propose multiple RRT* which generates a set of desired paths, provided that the optimal path is selected among them. Then, apply kinodynamic smoothing, which will result in dynamically feasible as well as obstacle-free path. Thereafter, a b spline-based trajectory is generated to maneuver vehicle autonomously in unknown environments. Finally, we have tested the proposed technique in various simulated environments.
Real-Time Long Range Trajectory Replanning for UAVs in Presence of Dynamics Obstacles
Jan 10, 2020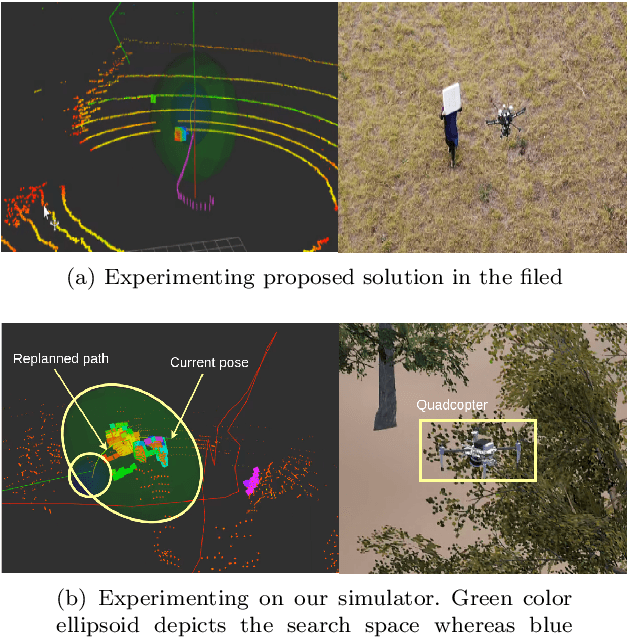
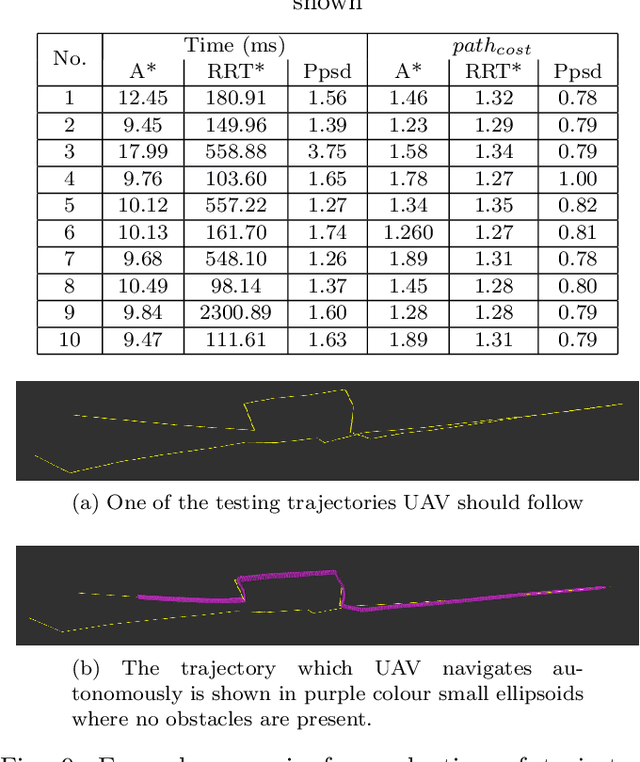
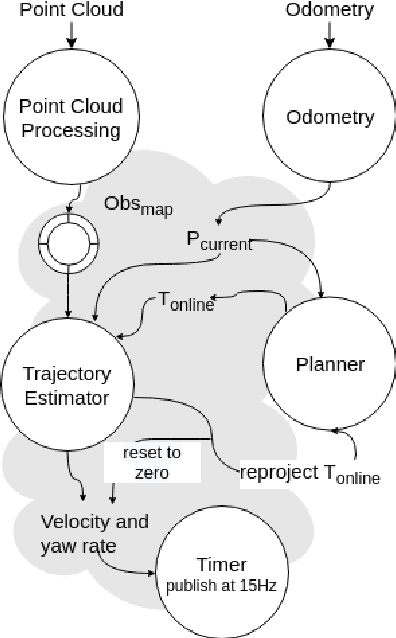
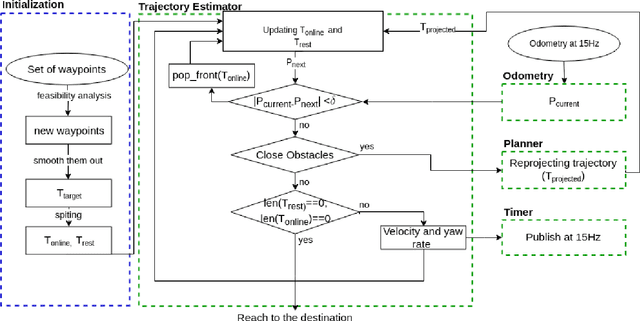
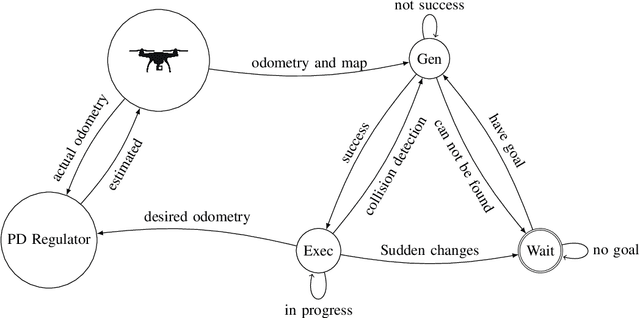
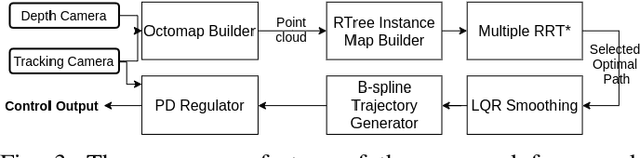
Real-time long-range local planning is a challenging task, especially in the presence of dynamics obstacles. We propose a complete system which is capable of performing the local replanning in real-time. It requires to provide the desired trajectory to be followed in the system initialization phase. Subsequently, it starts initializing sub-components of the system including point cloud processor, trajectory estimator and planner. Afterwards, the multi-rotary aerial vehicle starts moving on the given trajectory. When it detects obstacles, it replans the trajectory from the current pose to pre-defined distance incorporating the desired trajectory. Point cloud processor is employed to identify the closest obstacles around the vehicle. For replanning, Rapidly-exploring Random Trees (RRT*) is used with two modifications which allow planning the trajectory in milliseconds scales. Once we replanned trajectory, velocity components(x,y and z) and yaw rate are calculated. Those values are sent to the controller at a constant frequency to navigate the vehicle autonomously. Finally, we have evaluated each of the components separately and tested the complete system in the simulated and real environment.
Ground and Non-Ground Separation Filter for UAV Lidar Point Cloud
Nov 16, 2019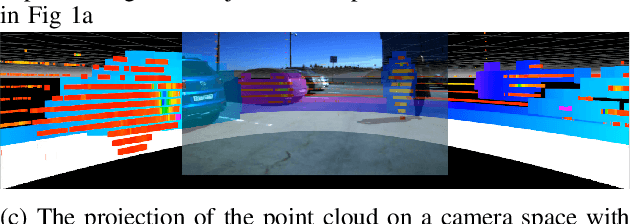
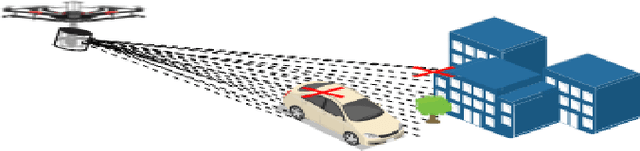
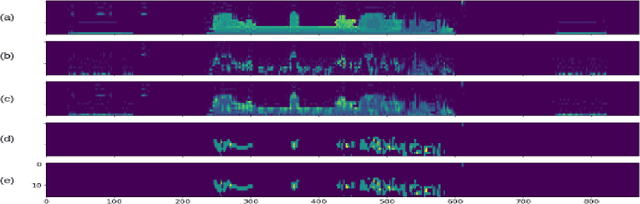
This paper proposes a novel approach for separating ground plane and non-ground objects on Lidar 3D point cloud as a filter. It is specially designed for real-time applications on unmanned aerial vehicles and works on sparse Lidar point clouds without preliminary mapping. We use this filter as a crucial component of fast obstacle avoidance system for agriculture drone operating at low altitude. As the first step, a point cloud is transformed into a depth image and then places with high density nearest to the vehicle (local maxima) are identified. Then we merge original depth image with identified locations after maximizing intensities of pixels in which local maxima were found. Next step is to calculate range angle image which represents angles between two consecutive laser beams based on improved depth image. Once a range angle image is constructed, smoothing is applied to reduce the noise. Finally, we find out connected components in the improved depth image while incorporating smoothed range angle image. This allows separating the non-ground objects. The rest of the locations of depth image belong to the ground plane. The filter has been tested on a simulated environment as well as an actual drone and provides real-time performance. We make our source code and dataset available online\footnote[2]{Source code and dataset are available at https://github.com/GPrathap/hagen.git
Ground Profile Recovery from Aerial 3D LiDAR-based Maps
Mar 26, 2019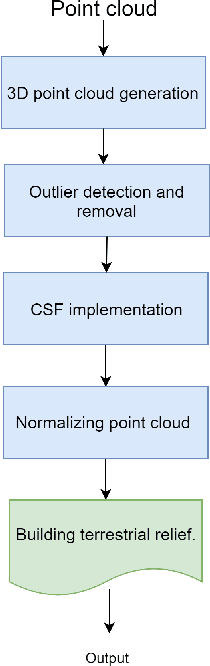
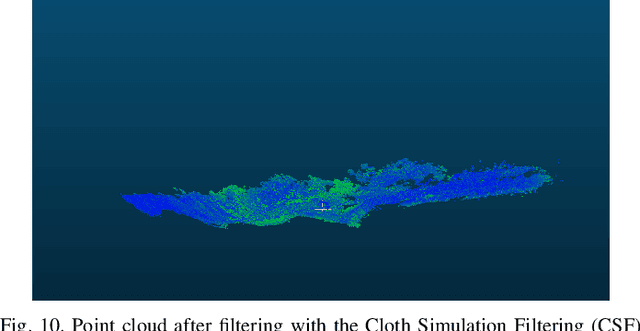
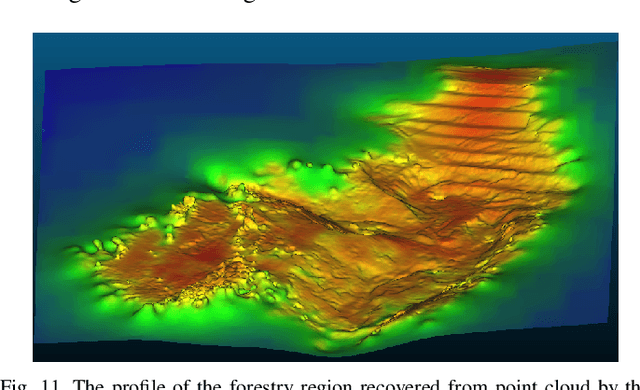
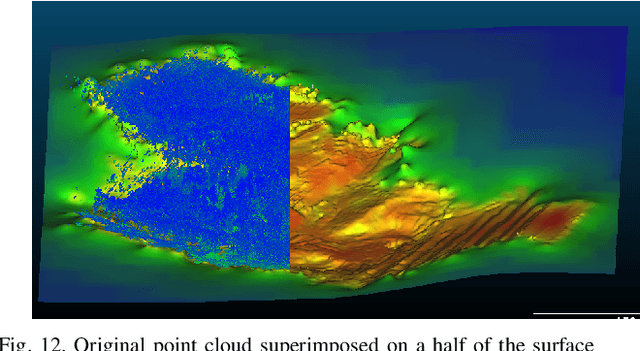
The paper presents the study and implementation of the ground detection methodology with filtration and removal of forest points from LiDAR-based 3D point cloud using the Cloth Simulation Filtering (CSF) algorithm. The methodology allows to recover a terrestrial relief and create a landscape map of a forestry region. As the proof-of-concept, we provided the outdoor flight experiment, launching a hexacopter under a mixed forestry region with sharp ground changes nearby Innopolis city (Russia), which demonstrated the encouraging results for both ground detection and methodology robustness.