 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimization-based Trajectory Tracking Approach for Multi-rotor Aerial Vehicles in Unknown Environments
Feb 12, 2022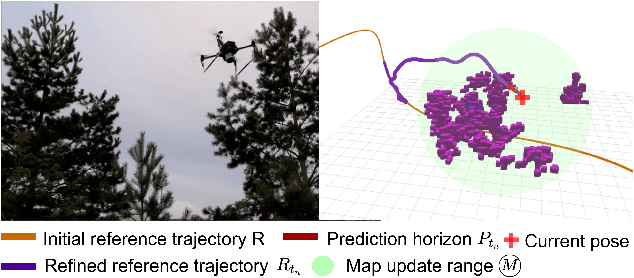
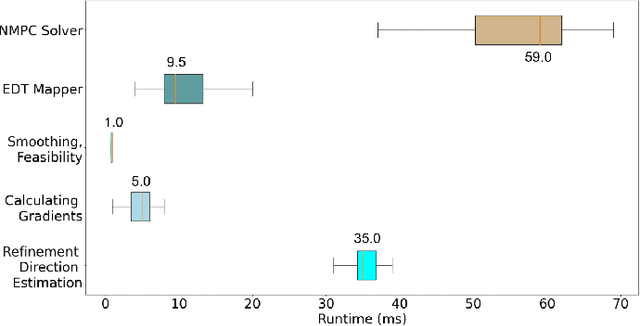
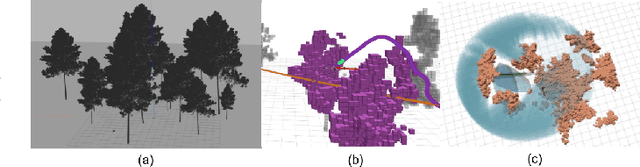
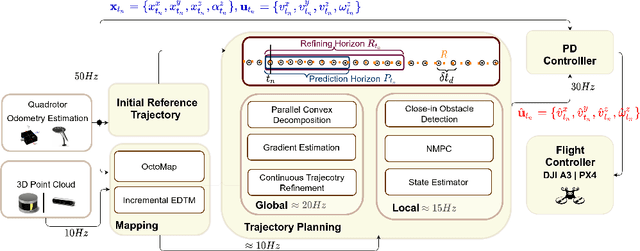
The goal of this paper is to develop a continuous optimization-based refinement of the reference trajectory to 'push it out' of the obstacle-occupied space in the global phase for Multi-rotor Aerial Vehicles in unknown environments. Our proposed approach comprises two planners: a global planner and a local planner. The global planner refines the initial reference trajectory when the trajectory goes either through an obstacle or near an obstacle and lets the local planner calculate a near-optimal control policy. The global planner comprises two convex programming approaches: the first one helps to refine the reference trajectory, and the second one helps to recover the reference trajectory if the first approach fails to refine. The global planner mainly focuses on real-time performance and obstacles avoidance, whereas the proposed formulation of the constrained nonlinear model predictive control-based local planner ensures safety, dynamic feasibility, and the reference trajectory tracking accuracy for low-speed maneuvers, provided that local and global planners have mean computation times 0.06s (15Hz) and 0.05s (20Hz), respectively, on an NVIDIA Jetson Xavier NX computer. The results of our experiment confirmed that, in cluttered environments, the proposed approach outperformed three other approaches: sampling-based pathfinding followed by trajectory generation, a local planner, and graph-based pathfinding followed by trajectory generation.
Path Planning Followed by Kinodynamic Smoothing for Multirotor Aerial Vehicles (MAVs)
Aug 29, 2020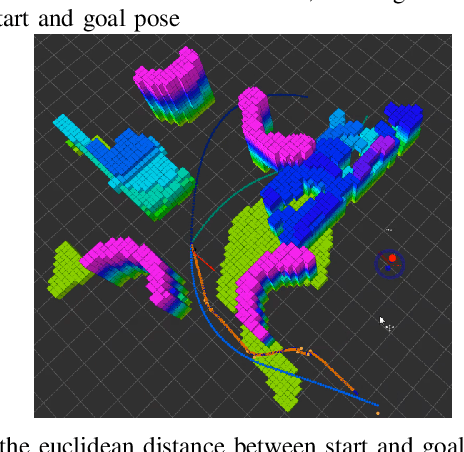
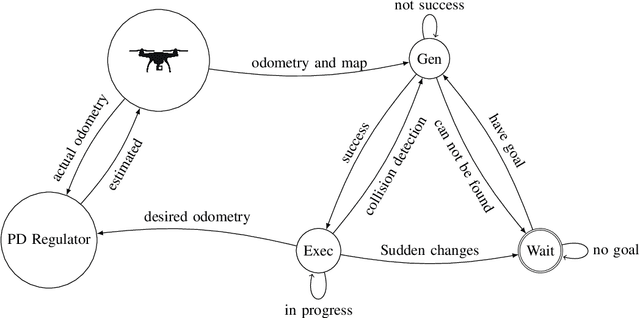
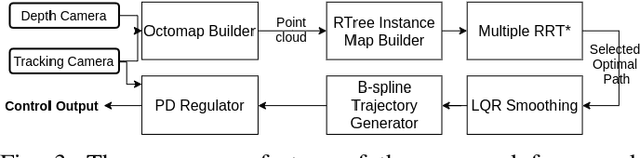
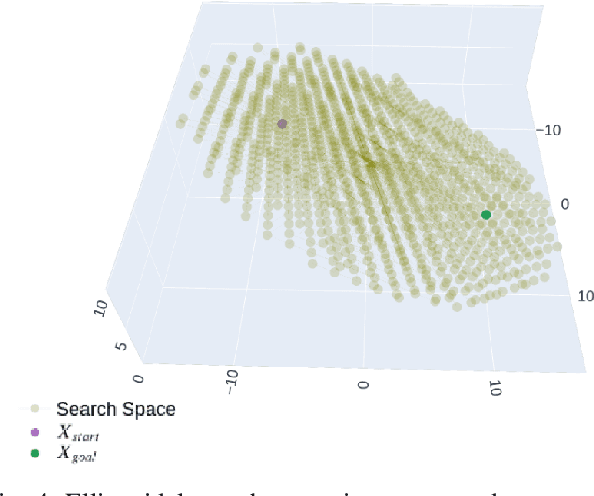
We explore path planning followed by kinodynamic smoothing while ensuring the vehicle dynamics feasibility for MAVs. We have chosen a geometrically based motion planning technique \textquotedblleft RRT*\textquotedblright\; for this purpose. In the proposed technique, we modified original RRT* introducing an adaptive search space and a steering function which help to increase the consistency of the planner. Moreover, we propose multiple RRT* which generates a set of desired paths, provided that the optimal path is selected among them. Then, apply kinodynamic smoothing, which will result in dynamically feasible as well as obstacle-free path. Thereafter, a b spline-based trajectory is generated to maneuver vehicle autonomously in unknown environments. Finally, we have tested the proposed technique in various simulated environments.