 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust explicit model predictive control for hybrid linear systems with parameter uncertainties
Jul 23, 2023Explicit model-predictive control (MPC) is a widely used control design method that employs optimization tools to find control policies offline; commonly it is posed as a semi-definite program (SDP) or as a mixed-integer SDP in the case of hybrid systems. However, mixed-integer SDPs are computationally expensive, motivating alternative formulations, such as zonotope-based MPC (zonotopes are a special type of symmetric polytopes). In this paper, we propose a robust explicit MPC method applicable to hybrid systems. More precisely, we extend existing zonotope-based MPC methods to account for multiplicative parametric uncertainty. Additionally, we propose a convex zonotope order reduction method that takes advantage of the iterative structure of the zonotope propagation problem to promote diagonal blocks in the zonotope generators and lower the number of decision variables. Finally, we developed a quasi-time-free policy choice algorithm, allowing the system to start from any point on the trajectory and avoid chattering associated with discrete switching of linear control policies based on the current state's membership in state-space regions. Last but not least, we verify the validity of the proposed methods on two experimental setups, varying physical parameters between experiments.
Path Planning Followed by Kinodynamic Smoothing for Multirotor Aerial Vehicles (MAVs)
Aug 29, 2020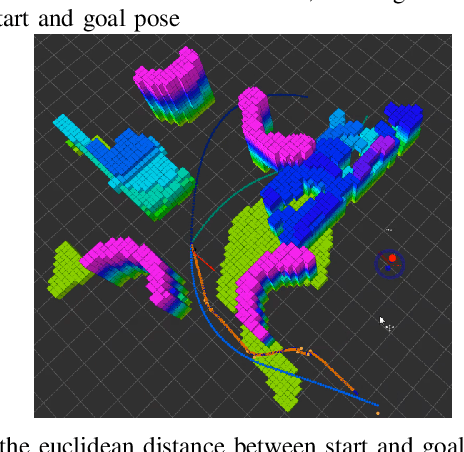
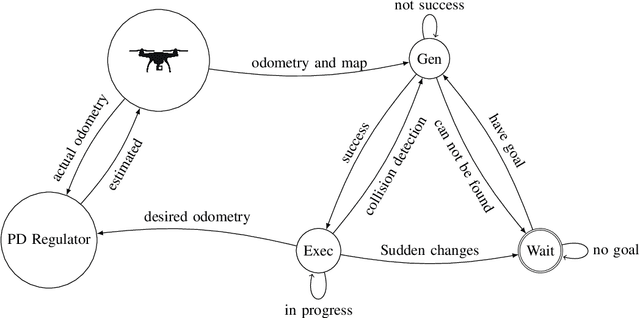
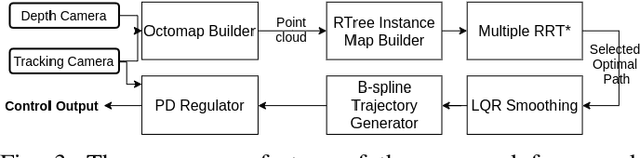
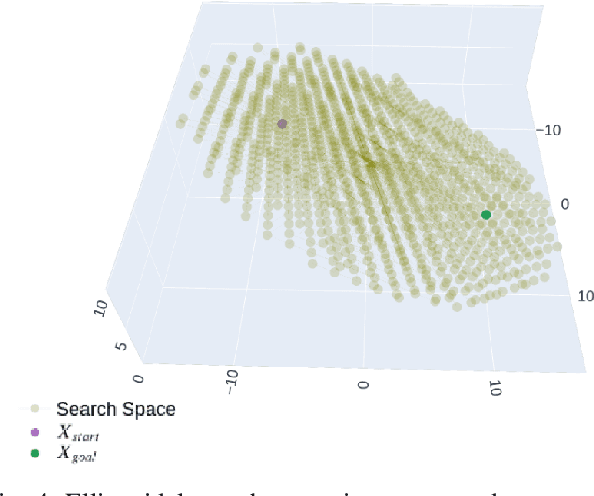
We explore path planning followed by kinodynamic smoothing while ensuring the vehicle dynamics feasibility for MAVs. We have chosen a geometrically based motion planning technique \textquotedblleft RRT*\textquotedblright\; for this purpose. In the proposed technique, we modified original RRT* introducing an adaptive search space and a steering function which help to increase the consistency of the planner. Moreover, we propose multiple RRT* which generates a set of desired paths, provided that the optimal path is selected among them. Then, apply kinodynamic smoothing, which will result in dynamically feasible as well as obstacle-free path. Thereafter, a b spline-based trajectory is generated to maneuver vehicle autonomously in unknown environments. Finally, we have tested the proposed technique in various simulated environments.
Learning Stabilizing Control Policies for a Tensegrity Hopper with Augmented Random Search
Apr 06, 2020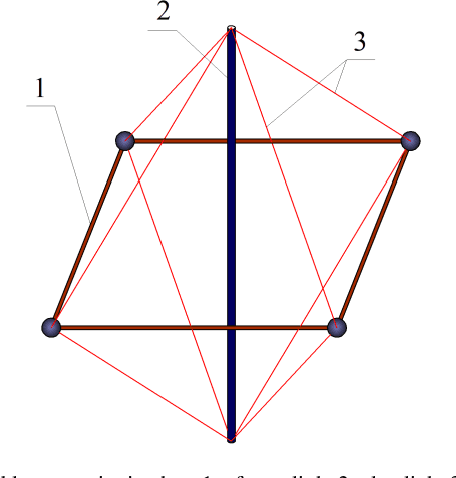
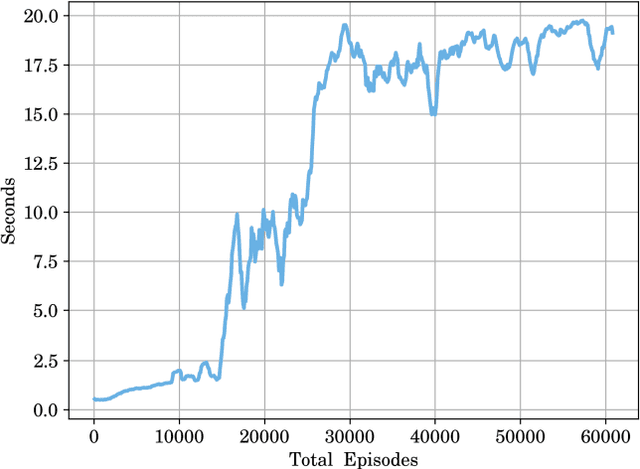
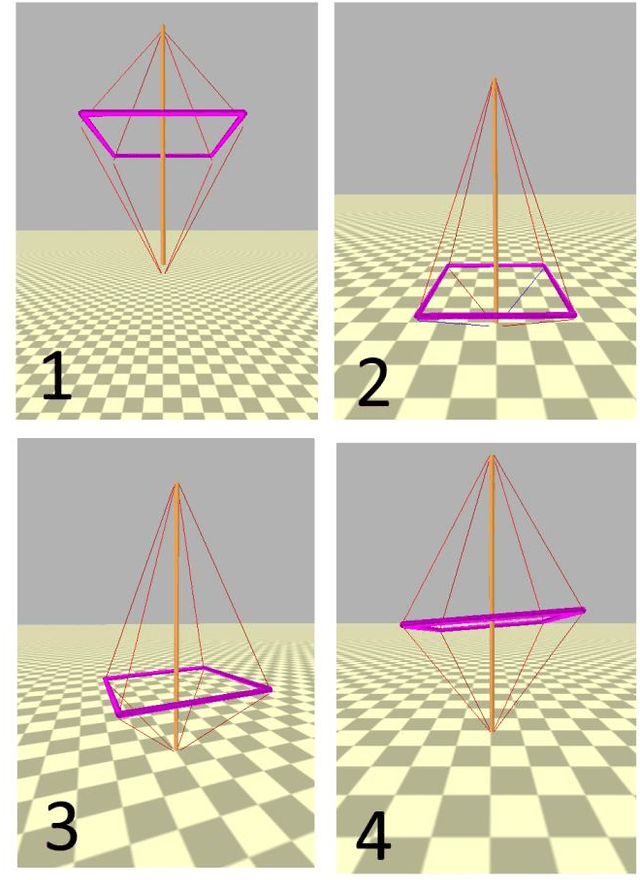
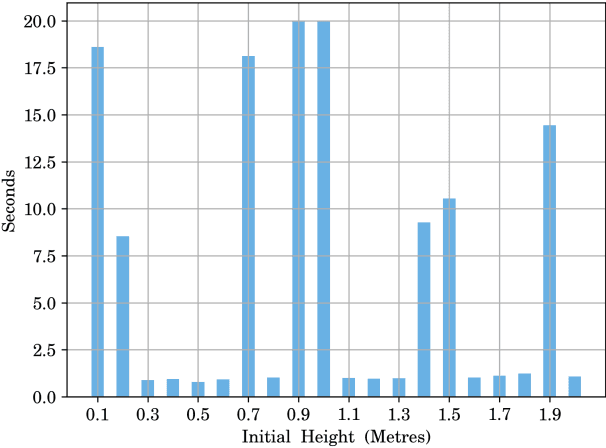
In this paper, we consider tensegrity hopper - a novel tensegrity-based robot, capable of moving by hopping. The paper focuses on the design of the stabilizing control policies, which are obtained with Augmented Random Search method. In particular, we search for control policies which allow the hopper to maintain vertical stability after performing a single jump. It is demonstrated, that the hopper can maintain a vertical configuration, subject to the different initial conditions and with changing control frequency rates. In particular, lowering control frequency from 1000Hz in training to 500Hz in execution did not affect the success rate of the balancing task.