Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Stabilizing Control Policies for a Tensegrity Hopper with Augmented Random Search
Paper and Code
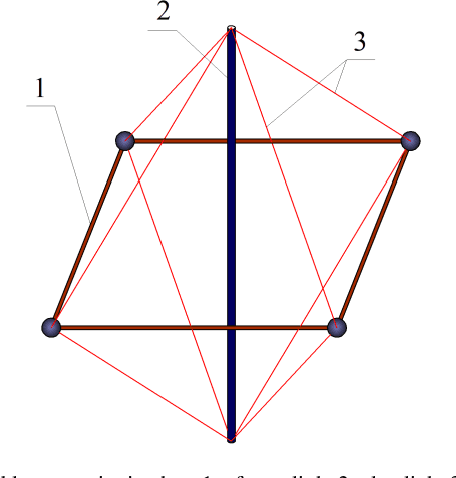
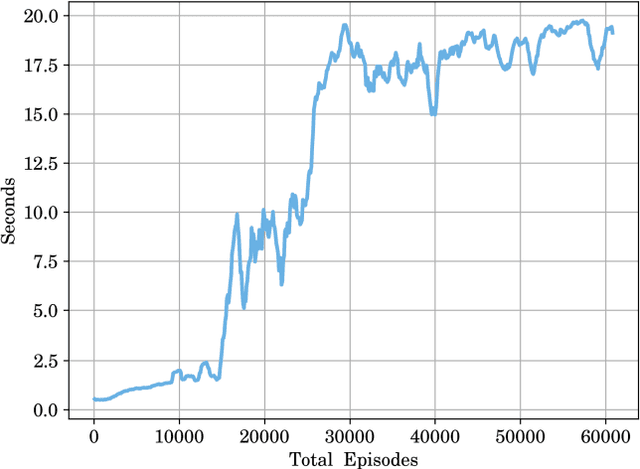
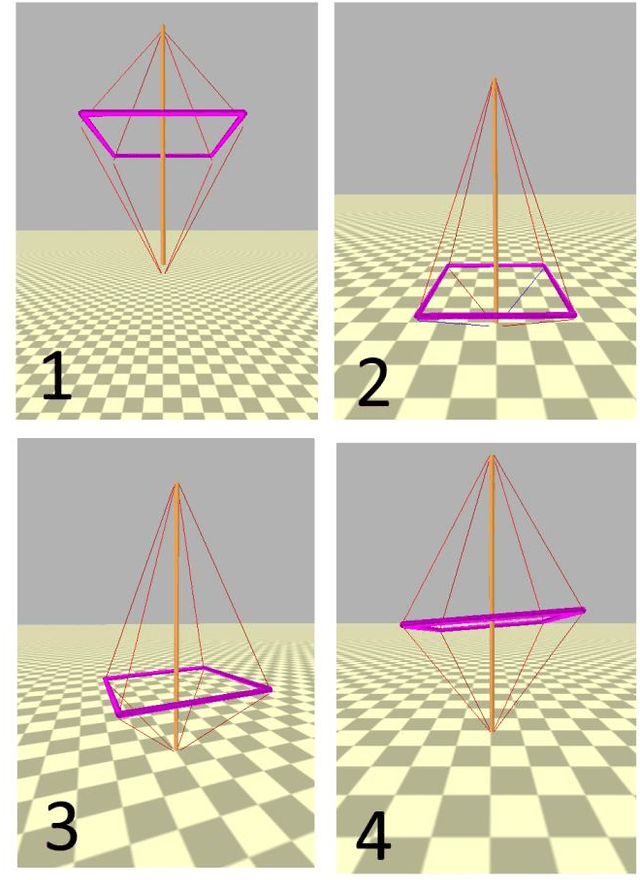
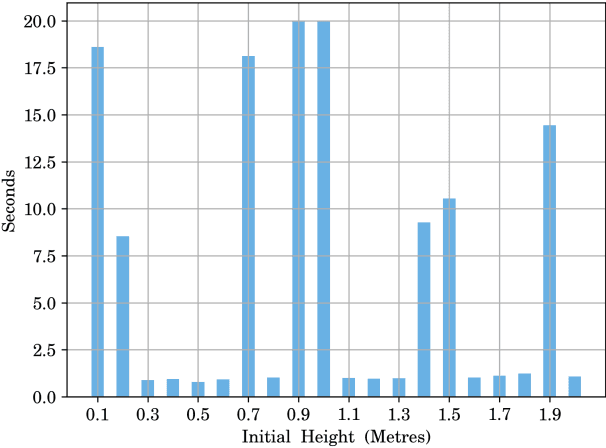
In this paper, we consider tensegrity hopper - a novel tensegrity-based robot, capable of moving by hopping. The paper focuses on the design of the stabilizing control policies, which are obtained with Augmented Random Search method. In particular, we search for control policies which allow the hopper to maintain vertical stability after performing a single jump. It is demonstrated, that the hopper can maintain a vertical configuration, subject to the different initial conditions and with changing control frequency rates. In particular, lowering control frequency from 1000Hz in training to 500Hz in execution did not affect the success rate of the balancing task.
* To appear in ICIE 2020
View paper on