 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerating images from caption and vice versa via CLIP-Guided Generative Latent Space Search
Feb 26, 2021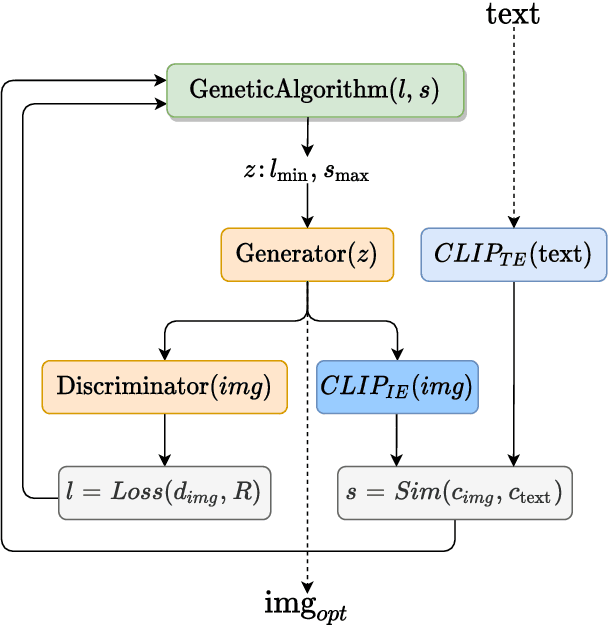

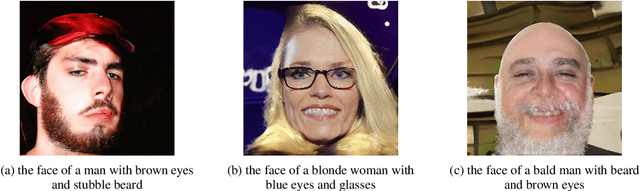
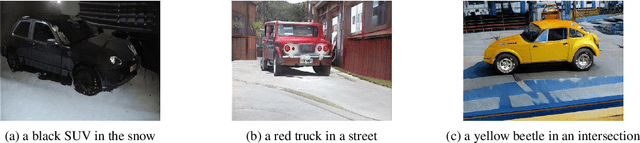
In this research work we present CLIP-GLaSS, a novel zero-shot framework to generate an image (or a caption) corresponding to a given caption (or image). CLIP-GLaSS is based on the CLIP neural network, which, given an image and a descriptive caption, provides similar embeddings. Differently, CLIP-GLaSS takes a caption (or an image) as an input, and generates the image (or the caption) whose CLIP embedding is the most similar to the input one. This optimal image (or caption) is produced via a generative network, after an exploration by a genetic algorithm. Promising results are shown, based on the experimentation of the image Generators BigGAN and StyleGAN2, and of the text Generator GPT2
Solving the scalarization issues of Advantage-based Reinforcement Learning Algorithms
Apr 08, 2020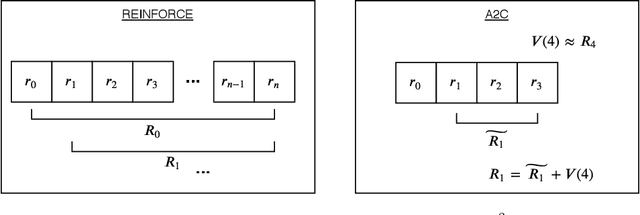
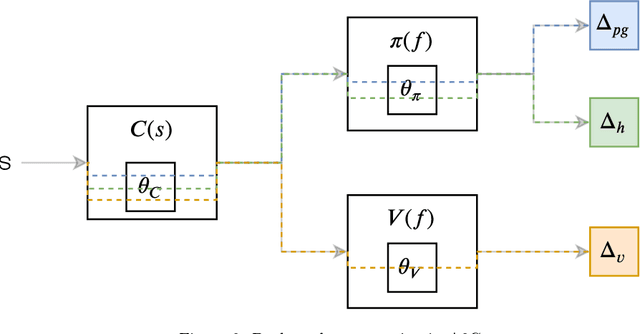
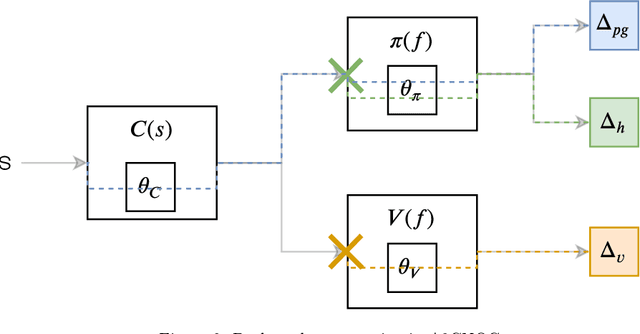
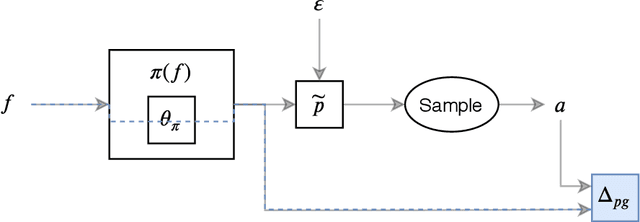
In this paper we investigate some of the issues that arise from the scalarization of the multi-objective optimization problem in the Advantage Actor Critic (A2C) reinforcement learning algorithm. We show how a naive scalarization leads to gradients overlapping and we also argue that the entropy regularization term just inject uncontrolled noise into the system. We propose two methods: one to avoid gradient overlapping (NOG) but keeping the same loss formulation; and one to avoid the noise injection (TE) but generating action distributions with a desired entropy. A comprehensive pilot experiment has been carried out showing how using our proposed methods speeds up the training of 210%. We argue how the proposed solutions can be applied to all the Advantage based reinforcement learning algorithms.
Formal derivation of Mesh Neural Networks with their Forward-Only gradient Propagation
May 19, 2019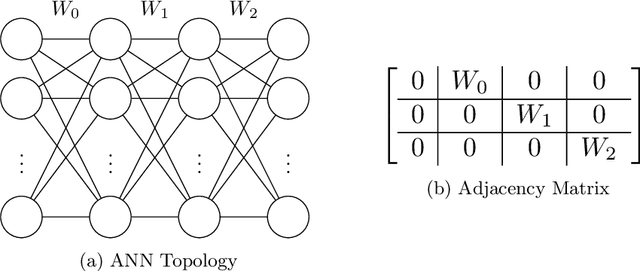
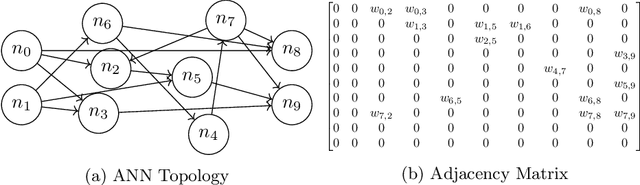
This paper proposes the Mesh Neural Network (MNN), a novel architecture which allows neurons to be connected in any topology, to efficiently route information. In MNNs, information is propagated between neurons throughout a state transition function. State and error gradients are then directly computed from state updates without backward computation. The MNN architecture and the error propagation schema is formalized and derived in tensor algebra. The proposed computational model can fully supply a gradient descent process, and is suitable for very large scale NNs, due to its expressivity and training efficiency, with respect to NNs based on back-propagation and computational graphs.
Urban Swarms: A new approach for autonomous waste management
Mar 01, 2019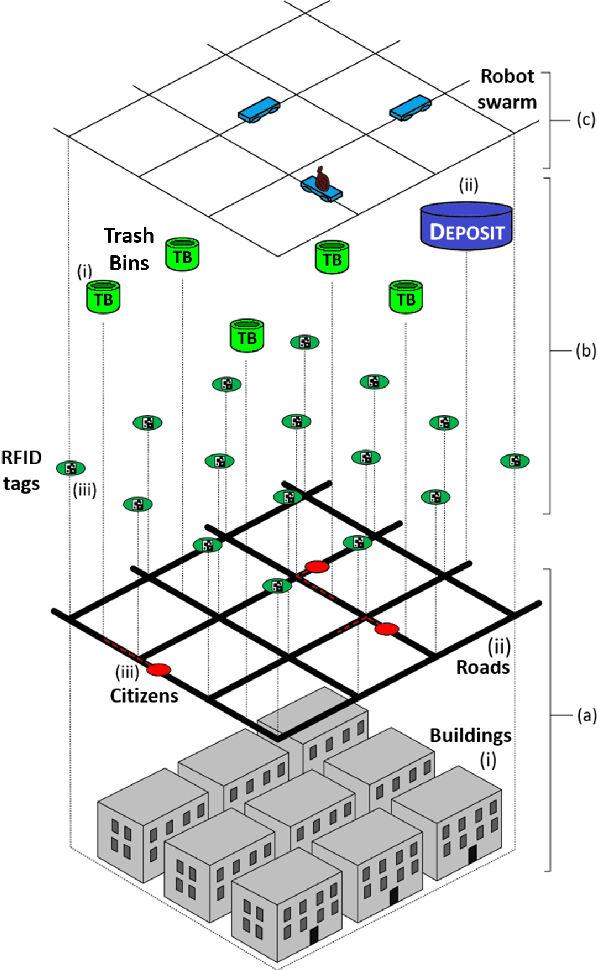
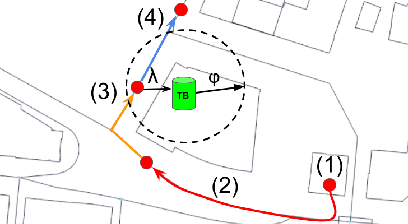
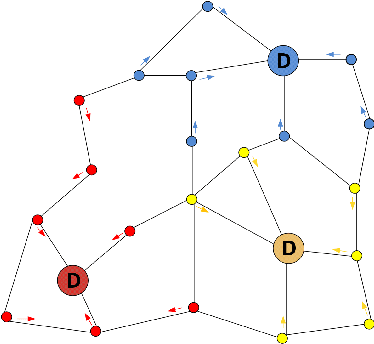
Modern cities are growing ecosystems that face new challenges due to the increasing population demands. One of the many problems they face nowadays is waste management, which has become a pressing issue requiring new solutions. Swarm robotics systems have been attracting an increasing amount of attention in the past years and they are expected to become one of the main driving factors for innovation in the field of robotics. The research presented in this paper explores the feasibility of a swarm robotics system in an urban environment. By using bio-inspired foraging methods such as multi-place foraging and stigmergy-based navigation, a swarm of robots is able to improve the efficiency and autonomy of the urban waste management system in a realistic scenario. To achieve this, a diverse set of simulation experiments was conducted using real-world GIS data and implementing different garbage collection scenarios driven by robot swarms. Results presented in this research show that the proposed system outperforms current approaches. Moreover, results not only show the efficiency of our solution, but also give insights about how to design and customize these systems.
A stigmergy-based analysis of city hotspots to discover trends and anomalies in urban transportation usage
Apr 16, 2018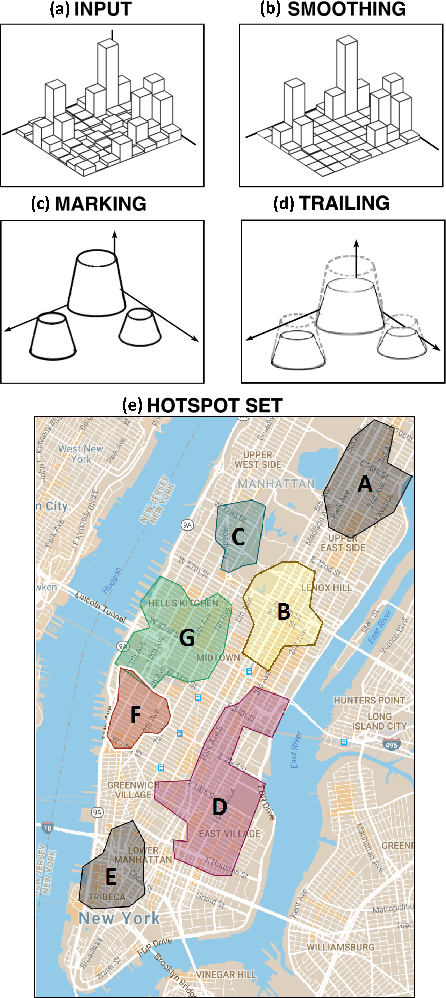

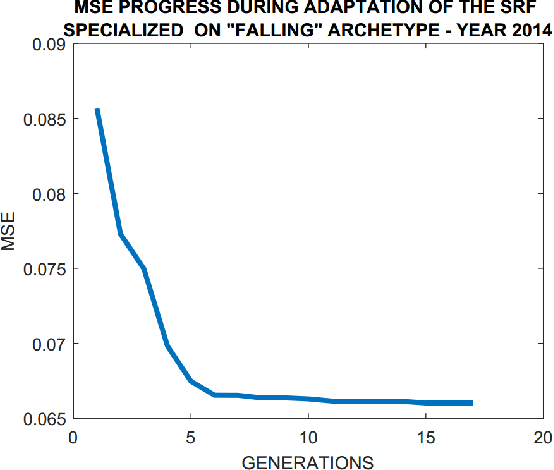
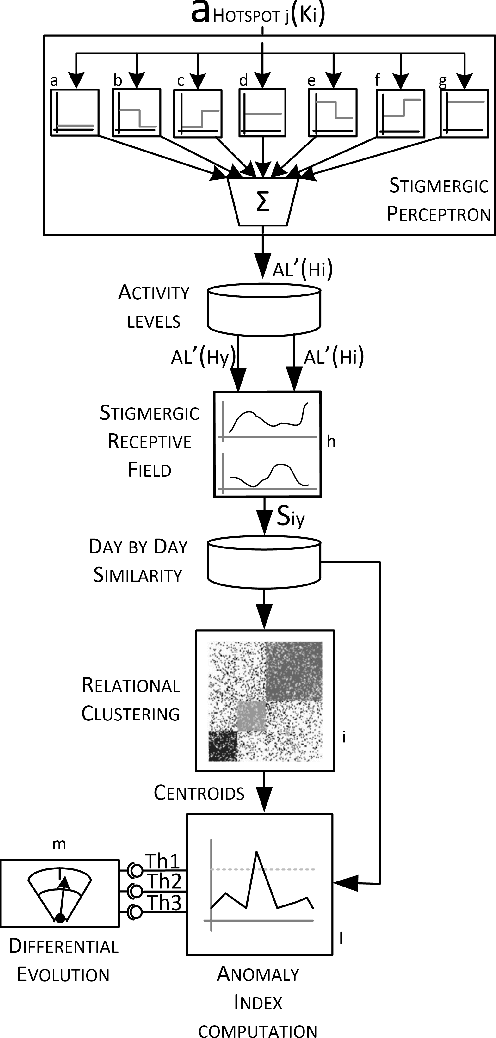
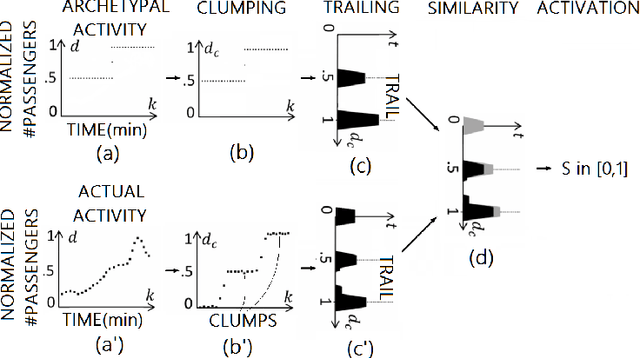
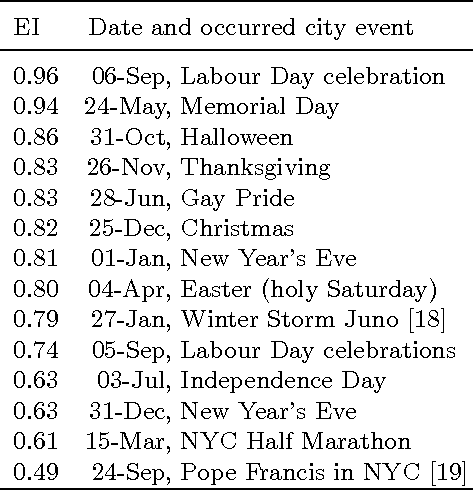
A key aspect of a sustainable urban transportation system is the effectiveness of transportation policies. To be effective, a policy has to consider a broad range of elements, such as pollution emission, traffic flow, and human mobility. Due to the complexity and variability of these elements in the urban area, to produce effective policies remains a very challenging task. With the introduction of the smart city paradigm, a widely available amount of data can be generated in the urban spaces. Such data can be a fundamental source of knowledge to improve policies because they can reflect the sustainability issues underlying the city. In this context, we propose an approach to exploit urban positioning data based on stigmergy, a bio-inspired mechanism providing scalar and temporal aggregation of samples. By employing stigmergy, samples in proximity with each other are aggregated into a functional structure called trail. The trail summarizes relevant dynamics in data and allows matching them, providing a measure of their similarity. Moreover, this mechanism can be specialized to unfold specific dynamics. Specifically, we identify high-density urban areas (i.e hotspots), analyze their activity over time, and unfold anomalies. Moreover, by matching activity patterns, a continuous measure of the dissimilarity with respect to the typical activity pattern is provided. This measure can be used by policy makers to evaluate the effect of policies and change them dynamically. As a case study, we analyze taxi trip data gathered in Manhattan from 2013 to 2015.
Stigmergy-based modeling to discover urban activity patterns from positioning data
Apr 12, 2017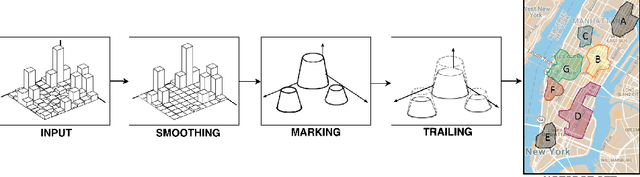

Positioning data offer a remarkable source of information to analyze crowds urban dynamics. However, discovering urban activity patterns from the emergent behavior of crowds involves complex system modeling. An alternative approach is to adopt computational techniques belonging to the emergent paradigm, which enables self-organization of data and allows adaptive analysis. Specifically, our approach is based on stigmergy. By using stigmergy each sample position is associated with a digital pheromone deposit, which progressively evaporates and aggregates with other deposits according to their spatiotemporal proximity. Based on this principle, we exploit positioning data to identify high density areas (hotspots) and characterize their activity over time. This characterization allows the comparison of dynamics occurring in different days, providing a similarity measure exploitable by clustering techniques. Thus, we cluster days according to their activity behavior, discovering unexpected urban activity patterns. As a case study, we analyze taxi traces in New York City during 2015.