 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePartial Convolution Meets Visual Attention
Mar 05, 2025Designing an efficient and effective neural network has remained a prominent topic in computer vision research. Depthwise onvolution (DWConv) is widely used in efficient CNNs or ViTs, but it needs frequent memory access during inference, which leads to low throughput. FasterNet attempts to introduce partial convolution (PConv) as an alternative to DWConv but compromises the accuracy due to underutilized channels. To remedy this shortcoming and consider the redundancy between feature map channels, we introduce a novel Partial visual ATtention mechanism (PAT) that can efficiently combine PConv with visual attention. Our exploration indicates that the partial attention mechanism can completely replace the full attention mechanism and reduce model parameters and FLOPs. Our PAT can derive three types of blocks: Partial Channel-Attention block (PAT_ch), Partial Spatial-Attention block (PAT_sp) and Partial Self-Attention block (PAT_sf). First, PAT_ch integrates the enhanced Gaussian channel attention mechanism to infuse global distribution information into the untouched channels of PConv. Second, we introduce the spatial-wise attention to the MLP layer to further improve model accuracy. Finally, we replace PAT_ch in the last stage with the self-attention mechanism to extend the global receptive field. Building upon PAT, we propose a novel hybrid network family, named PATNet, which achieves superior top-1 accuracy and inference speed compared to FasterNet on ImageNet-1K classification and excel in both detection and segmentation on the COCO dataset. Particularly, our PATNet-T2 achieves 1.3% higher accuracy than FasterNet-T2, while exhibiting 25% higher GPU throughput and 24% lower CPU latency.
EGSRAL: An Enhanced 3D Gaussian Splatting based Renderer with Automated Labeling for Large-Scale Driving Scene
Dec 20, 2024



3D Gaussian Splatting (3D GS) has gained popularity due to its faster rendering speed and high-quality novel view synthesis. Some researchers have explored using 3D GS for reconstructing driving scenes. However, these methods often rely on various data types, such as depth maps, 3D boxes, and trajectories of moving objects. Additionally, the lack of annotations for synthesized images limits their direct application in downstream tasks. To address these issues, we propose EGSRAL, a 3D GS-based method that relies solely on training images without extra annotations. EGSRAL enhances 3D GS's capability to model both dynamic objects and static backgrounds and introduces a novel adaptor for auto labeling, generating corresponding annotations based on existing annotations. We also propose a grouping strategy for vanilla 3D GS to address perspective issues in rendering large-scale, complex scenes. Our method achieves state-of-the-art performance on multiple datasets without any extra annotation. For example, the PSNR metric reaches 29.04 on the nuScenes dataset. Moreover, our automated labeling can significantly improve the performance of 2D/3D detection tasks. Code is available at https://github.com/jiangxb98/EGSRAL.
FTP: A Fine-grained Token-wise Pruner for Large Language Models via Token Routing
Dec 16, 2024Recently, large language models (LLMs) have demonstrated superior performance across various tasks by adhering to scaling laws, which significantly increase model size. However, the huge computation overhead during inference hinders the deployment in industrial applications. Many works leverage traditional compression approaches to boost model inference, but these always introduce additional training costs to restore the performance and the pruning results typically show noticeable performance drops compared to the original model when aiming for a specific level of acceleration. To address these issues, we propose a fine-grained token-wise pruning approach for the LLMs, which presents a learnable router to adaptively identify the less important tokens and skip them across model blocks to reduce computational cost during inference. To construct the router efficiently, we present a search-based sparsity scheduler for pruning sparsity allocation, a trainable router combined with our proposed four low-dimensional factors as input and three proposed losses. We conduct extensive experiments across different benchmarks on different LLMs to demonstrate the superiority of our method. Our approach achieves state-of-the-art (SOTA) pruning results, surpassing other existing pruning methods. For instance, our method outperforms BlockPruner and ShortGPT by approximately 10 points on both LLaMA2-7B and Qwen1.5-7B in accuracy retention at comparable token sparsity levels.
Fast Occupancy Network
Dec 10, 2024Occupancy Network has recently attracted much attention in autonomous driving. Instead of monocular 3D detection and recent bird's eye view(BEV) models predicting 3D bounding box of obstacles, Occupancy Network predicts the category of voxel in specified 3D space around the ego vehicle via transforming 3D detection task into 3D voxel segmentation task, which has much superiority in tackling category outlier obstacles and providing fine-grained 3D representation. However, existing methods usually require huge computation resources than previous methods, which hinder the Occupancy Network solution applying in intelligent driving systems. To address this problem, we make an analysis of the bottleneck of Occupancy Network inference cost, and present a simple and fast Occupancy Network model, which adopts a deformable 2D convolutional layer to lift BEV feature to 3D voxel feature and presents an efficient voxel feature pyramid network (FPN) module to improve performance with few computational cost. Further, we present a cost-free 2D segmentation branch in perspective view after feature extractors for Occupancy Network during inference phase to improve accuracy. Experimental results demonstrate that our method consistently outperforms existing methods in both accuracy and inference speed, which surpasses recent state-of-the-art (SOTA) OCCNet by 1.7% with ResNet50 backbone with about 3X inference speedup. Furthermore, our method can be easily applied to existing BEV models to transform them into Occupancy Network models.
DiP-GO: A Diffusion Pruner via Few-step Gradient Optimization
Oct 22, 2024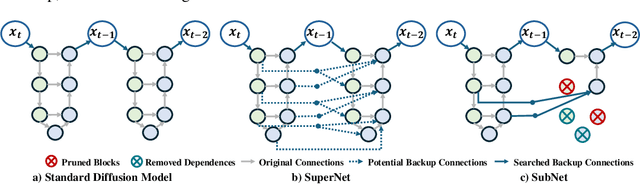
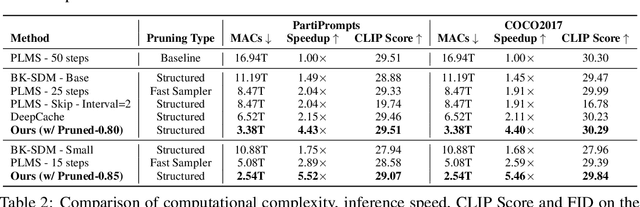
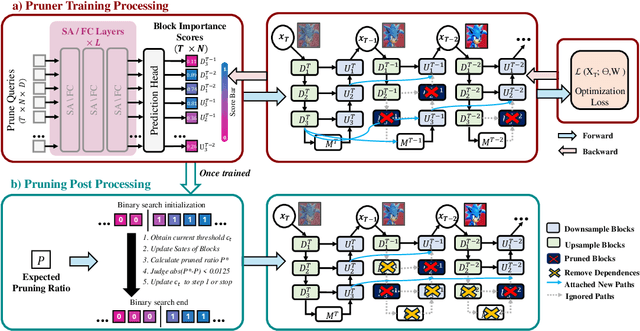
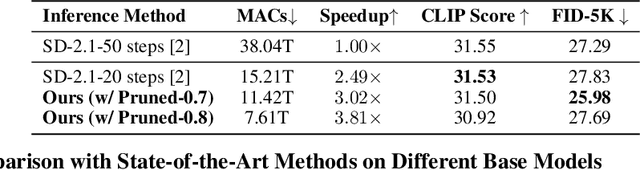
Diffusion models have achieved remarkable progress in the field of image generation due to their outstanding capabilities. However, these models require substantial computing resources because of the multi-step denoising process during inference. While traditional pruning methods have been employed to optimize these models, the retraining process necessitates large-scale training datasets and extensive computational costs to maintain generalization ability, making it neither convenient nor efficient. Recent studies attempt to utilize the similarity of features across adjacent denoising stages to reduce computational costs through simple and static strategies. However, these strategies cannot fully harness the potential of the similar feature patterns across adjacent timesteps. In this work, we propose a novel pruning method that derives an efficient diffusion model via a more intelligent and differentiable pruner. At the core of our approach is casting the model pruning process into a SubNet search process. Specifically, we first introduce a SuperNet based on standard diffusion via adding some backup connections built upon the similar features. We then construct a plugin pruner network and design optimization losses to identify redundant computation. Finally, our method can identify an optimal SubNet through few-step gradient optimization and a simple post-processing procedure. We conduct extensive experiments on various diffusion models including Stable Diffusion series and DiTs. Our DiP-GO approach achieves 4.4 x speedup for SD-1.5 without any loss of accuracy, significantly outperforming the previous state-of-the-art methods.
VIPS-Odom: Visual-Inertial Odometry Tightly-coupled with Parking Slots for Autonomous Parking
Jul 06, 2024Precise localization is of great importance for autonomous parking task since it provides service for the downstream planning and control modules, which significantly affects the system performance. For parking scenarios, dynamic lighting, sparse textures, and the instability of global positioning system (GPS) signals pose challenges for most traditional localization methods. To address these difficulties, we propose VIPS-Odom, a novel semantic visual-inertial odometry framework for underground autonomous parking, which adopts tightly-coupled optimization to fuse measurements from multi-modal sensors and solves odometry. Our VIPS-Odom integrates parking slots detected from the synthesized bird-eye-view (BEV) image with traditional feature points in the frontend, and conducts tightly-coupled optimization with joint constraints introduced by measurements from the inertial measurement unit, wheel speed sensor and parking slots in the backend. We develop a multi-object tracking framework to robustly track parking slots' states. To prove the superiority of our method, we equip an electronic vehicle with related sensors and build an experimental platform based on ROS2 system. Extensive experiments demonstrate the efficacy and advantages of our method compared with other baselines for parking scenarios.
Amphista: Accelerate LLM Inference with Bi-directional Multiple Drafting Heads in a Non-autoregressive Style
Jun 19, 2024



Large Language Models (LLMs) inherently use autoregressive decoding, which lacks parallelism in inference and results in significantly slow inference speeds, especially when hardware parallel accelerators and memory bandwidth are not fully utilized. In this work, we propose Amphista, a speculative decoding algorithm that adheres to a non-autoregressive decoding paradigm. Owing to the increased parallelism, our method demonstrates higher efficiency in inference compared to autoregressive methods. Specifically, Amphista models an Auto-embedding Block capable of parallel inference, incorporating bi-directional attention to enable interaction between different drafting heads. Additionally, Amphista implements Staged Adaptation Layers to facilitate the transition of semantic information from the base model's autoregressive inference to the drafting heads' non-autoregressive speculation, thereby achieving paradigm transformation and feature fusion. We conduct a series of experiments on a suite of Vicuna models using MT-Bench and Spec-Bench. For the Vicuna 33B model, Amphista achieves up to 2.75$\times$ and 1.40$\times$ wall-clock acceleration compared to vanilla autoregressive decoding and Medusa, respectively, while preserving lossless generation quality.
Sparse Laneformer
Apr 11, 2024



Lane detection is a fundamental task in autonomous driving, and has achieved great progress as deep learning emerges. Previous anchor-based methods often design dense anchors, which highly depend on the training dataset and remain fixed during inference. We analyze that dense anchors are not necessary for lane detection, and propose a transformer-based lane detection framework based on a sparse anchor mechanism. To this end, we generate sparse anchors with position-aware lane queries and angle queries instead of traditional explicit anchors. We adopt Horizontal Perceptual Attention (HPA) to aggregate the lane features along the horizontal direction, and adopt Lane-Angle Cross Attention (LACA) to perform interactions between lane queries and angle queries. We also propose Lane Perceptual Attention (LPA) based on deformable cross attention to further refine the lane predictions. Our method, named Sparse Laneformer, is easy-to-implement and end-to-end trainable. Extensive experiments demonstrate that Sparse Laneformer performs favorably against the state-of-the-art methods, e.g., surpassing Laneformer by 3.0% F1 score and O2SFormer by 0.7% F1 score with fewer MACs on CULane with the same ResNet-34 backbone.
UPDP: A Unified Progressive Depth Pruner for CNN and Vision Transformer
Jan 12, 2024Traditional channel-wise pruning methods by reducing network channels struggle to effectively prune efficient CNN models with depth-wise convolutional layers and certain efficient modules, such as popular inverted residual blocks. Prior depth pruning methods by reducing network depths are not suitable for pruning some efficient models due to the existence of some normalization layers. Moreover, finetuning subnet by directly removing activation layers would corrupt the original model weights, hindering the pruned model from achieving high performance. To address these issues, we propose a novel depth pruning method for efficient models. Our approach proposes a novel block pruning strategy and progressive training method for the subnet. Additionally, we extend our pruning method to vision transformer models. Experimental results demonstrate that our method consistently outperforms existing depth pruning methods across various pruning configurations. We obtained three pruned ConvNeXtV1 models with our method applying on ConvNeXtV1, which surpass most SOTA efficient models with comparable inference performance. Our method also achieves state-of-the-art pruning performance on the vision transformer model.
Separated RoadTopoFormer
Jul 04, 2023Understanding driving scenarios is crucial to realizing autonomous driving. Previous works such as map learning and BEV lane detection neglect the connection relationship between lane instances, and traffic elements detection tasks usually neglect the relationship with lane lines. To address these issues, the task is presented which includes 4 sub-tasks, the detection of traffic elements, the detection of lane centerlines, reasoning connection relationships among lanes, and reasoning assignment relationships between lanes and traffic elements. We present Separated RoadTopoFormer to tackle the issues, which is an end-to-end framework that detects lane centerline and traffic elements with reasoning relationships among them. We optimize each module separately to prevent interaction with each other and aggregate them together with few finetunes. For two detection heads, we adopted a DETR-like architecture to detect objects, and for the relationship head, we concat two instance features from front detectors and feed them to the classifier to obtain relationship probability. Our final submission achieves 0.445 OLS, which is competitive in both sub-task and combined scores.