 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLM-based Text Simplification and its Effect on User Comprehension and Cognitive Load
May 04, 2025Information on the web, such as scientific publications and Wikipedia, often surpasses users' reading level. To help address this, we used a self-refinement approach to develop a LLM capability for minimally lossy text simplification. To validate our approach, we conducted a randomized study involving 4563 participants and 31 texts spanning 6 broad subject areas: PubMed (biomedical scientific articles), biology, law, finance, literature/philosophy, and aerospace/computer science. Participants were randomized to viewing original or simplified texts in a subject area, and answered multiple-choice questions (MCQs) that tested their comprehension of the text. The participants were also asked to provide qualitative feedback such as task difficulty. Our results indicate that participants who read the simplified text answered more MCQs correctly than their counterparts who read the original text (3.9% absolute increase, p<0.05). This gain was most striking with PubMed (14.6%), while more moderate gains were observed for finance (5.5%), aerospace/computer science (3.8%) domains, and legal (3.5%). Notably, the results were robust to whether participants could refer back to the text while answering MCQs. The absolute accuracy decreased by up to ~9% for both original and simplified setups where participants could not refer back to the text, but the ~4% overall improvement persisted. Finally, participants' self-reported perceived ease based on a simplified NASA Task Load Index was greater for those who read the simplified text (absolute change on a 5-point scale 0.33, p<0.05). This randomized study, involving an order of magnitude more participants than prior works, demonstrates the potential of LLMs to make complex information easier to understand. Our work aims to enable a broader audience to better learn and make use of expert knowledge available on the web, improving information accessibility.
PhotoBot: Reference-Guided Interactive Photography via Natural Language
Jan 19, 2024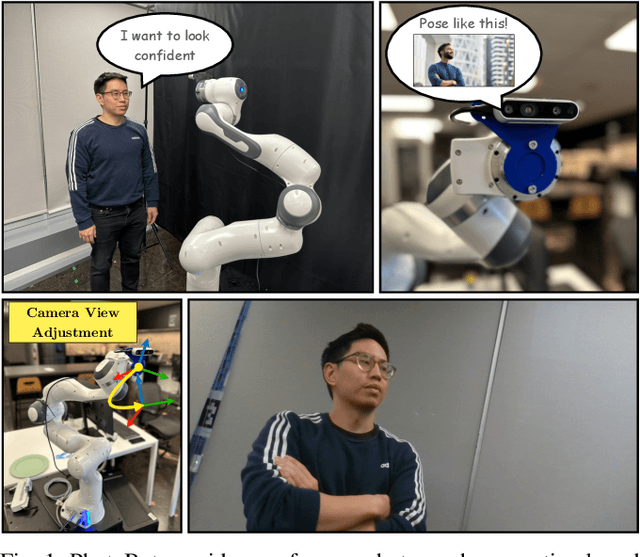

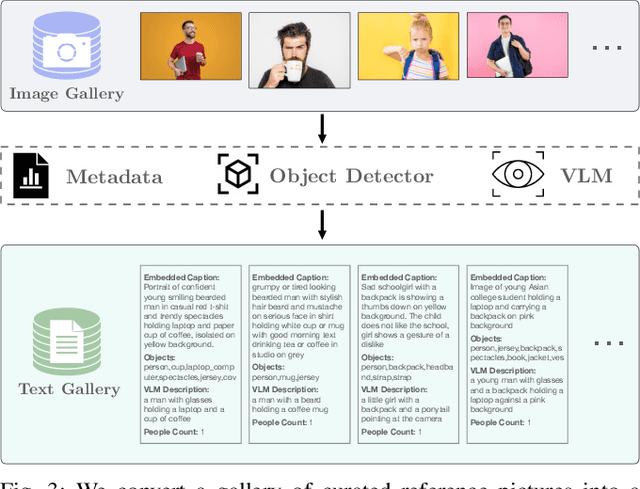

We introduce PhotoBot, a framework for automated photo acquisition based on an interplay between high-level human language guidance and a robot photographer. We propose to communicate photography suggestions to the user via a reference picture that is retrieved from a curated gallery. We exploit a visual language model (VLM) and an object detector to characterize reference pictures via textual descriptions and use a large language model (LLM) to retrieve relevant reference pictures based on a user's language query through text-based reasoning. To correspond the reference picture and the observed scene, we exploit pre-trained features from a vision transformer capable of capturing semantic similarity across significantly varying images. Using these features, we compute pose adjustments for an RGB-D camera by solving a Perspective-n-Point (PnP) problem. We demonstrate our approach on a real-world manipulator equipped with a wrist camera. Our user studies show that photos taken by PhotoBot are often more aesthetically pleasing than those taken by users themselves, as measured by human feedback.
Anomaly Detection for Scalable Task Grouping in Reinforcement Learning-based RAN Optimization
Dec 06, 2023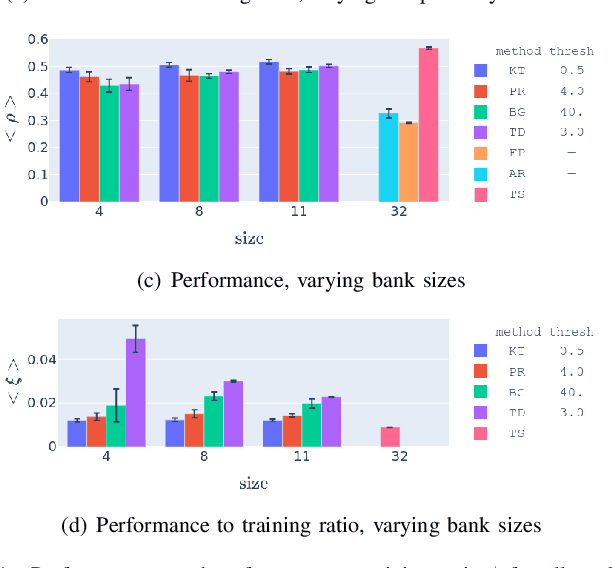
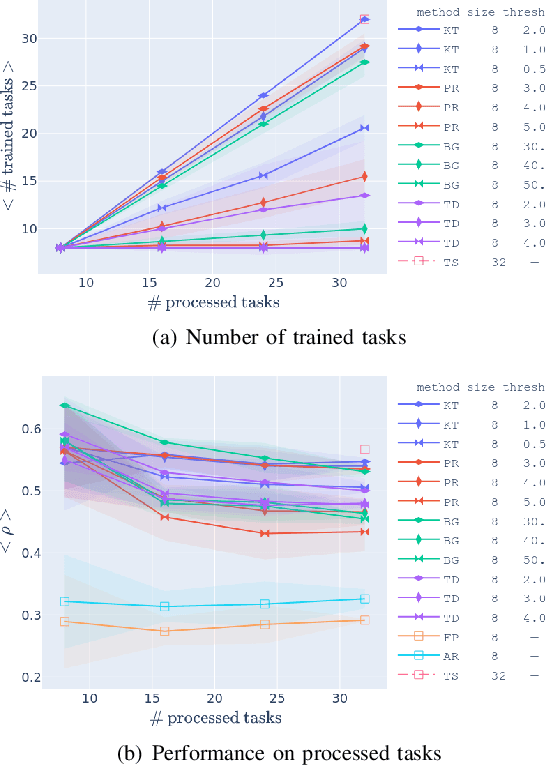
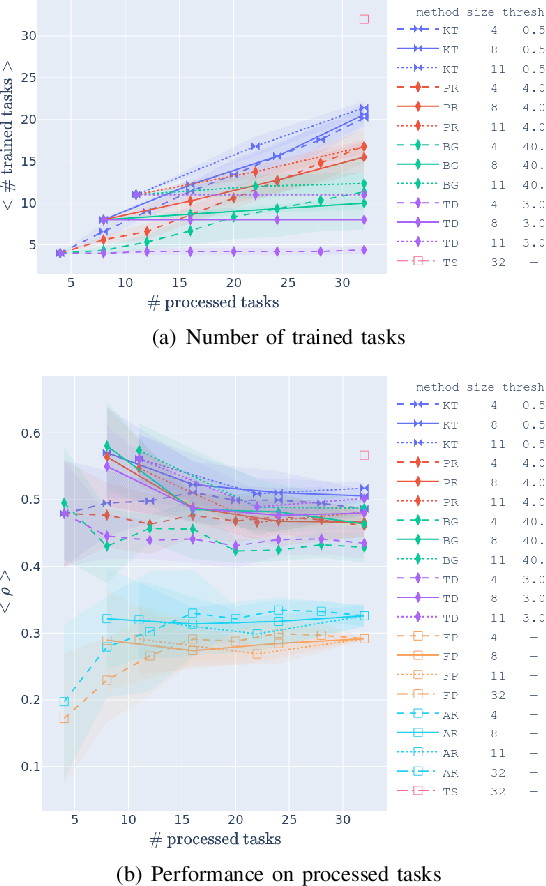
The use of learning-based methods for optimizing cellular radio access networks (RAN) has received increasing attention in recent years. This coincides with a rapid increase in the number of cell sites worldwide, driven largely by dramatic growth in cellular network traffic. Training and maintaining learned models that work well across a large number of cell sites has thus become a pertinent problem. This paper proposes a scalable framework for constructing a reinforcement learning policy bank that can perform RAN optimization across a large number of cell sites with varying traffic patterns. Central to our framework is a novel application of anomaly detection techniques to assess the compatibility between sites (tasks) and the policy bank. This allows our framework to intelligently identify when a policy can be reused for a task, and when a new policy needs to be trained and added to the policy bank. Our results show that our approach to compatibility assessment leads to an efficient use of computational resources, by allowing us to construct a performant policy bank without exhaustively training on all tasks, which makes it applicable under real-world constraints.
Policy Reuse for Communication Load Balancing in Unseen Traffic Scenarios
Mar 22, 2023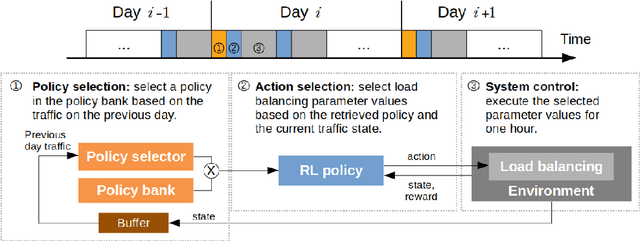
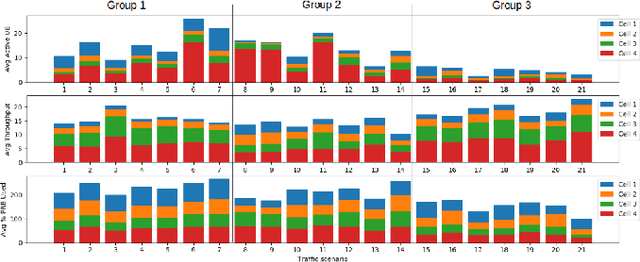
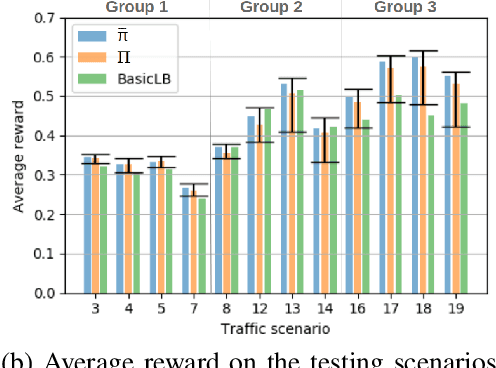
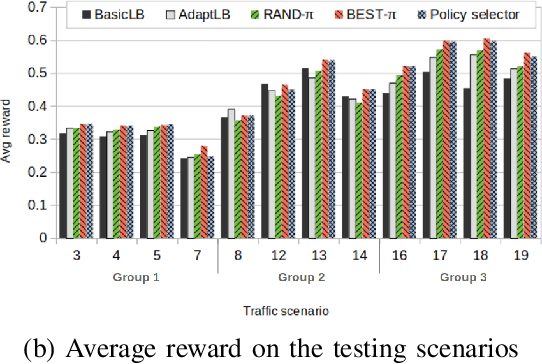
With the continuous growth in communication network complexity and traffic volume, communication load balancing solutions are receiving increasing attention. Specifically, reinforcement learning (RL)-based methods have shown impressive performance compared with traditional rule-based methods. However, standard RL methods generally require an enormous amount of data to train, and generalize poorly to scenarios that are not encountered during training. We propose a policy reuse framework in which a policy selector chooses the most suitable pre-trained RL policy to execute based on the current traffic condition. Our method hinges on a policy bank composed of policies trained on a diverse set of traffic scenarios. When deploying to an unknown traffic scenario, we select a policy from the policy bank based on the similarity between the previous-day traffic of the current scenario and the traffic observed during training. Experiments demonstrate that this framework can outperform classical and adaptive rule-based methods by a large margin.
Underwater Multi-Robot Convoying using Visual Tracking by Detection
Sep 25, 2017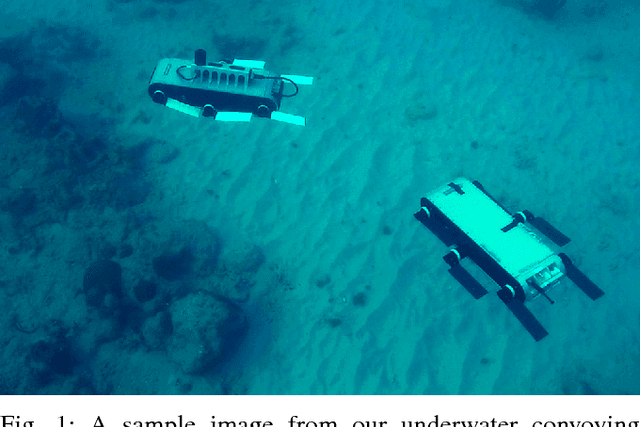
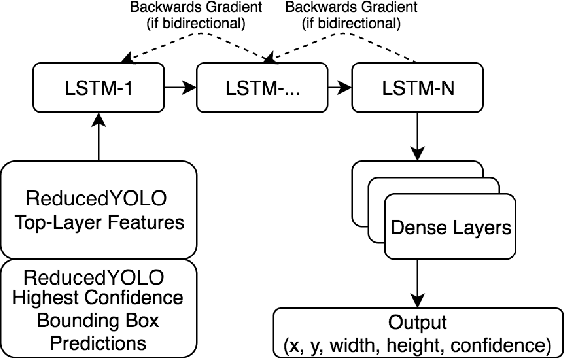
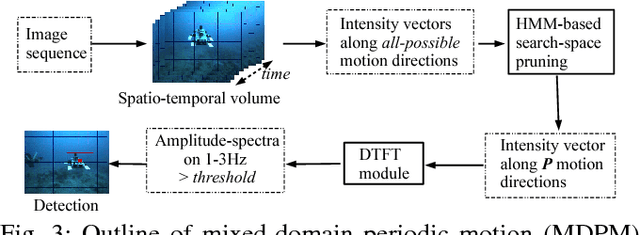
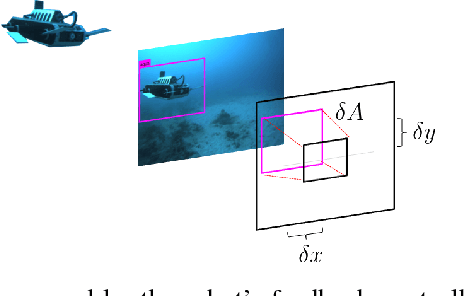
We present a robust multi-robot convoying approach that relies on visual detection of the leading agent, thus enabling target following in unstructured 3-D environments. Our method is based on the idea of tracking-by-detection, which interleaves efficient model-based object detection with temporal filtering of image-based bounding box estimation. This approach has the important advantage of mitigating tracking drift (i.e. drifting away from the target object), which is a common symptom of model-free trackers and is detrimental to sustained convoying in practice. To illustrate our solution, we collected extensive footage of an underwater robot in ocean settings, and hand-annotated its location in each frame. Based on this dataset, we present an empirical comparison of multiple tracker variants, including the use of several convolutional neural networks, both with and without recurrent connections, as well as frequency-based model-free trackers. We also demonstrate the practicality of this tracking-by-detection strategy in real-world scenarios by successfully controlling a legged underwater robot in five degrees of freedom to follow another robot's independent motion.