 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderwater Multi-Robot Convoying using Visual Tracking by Detection
Paper and Code
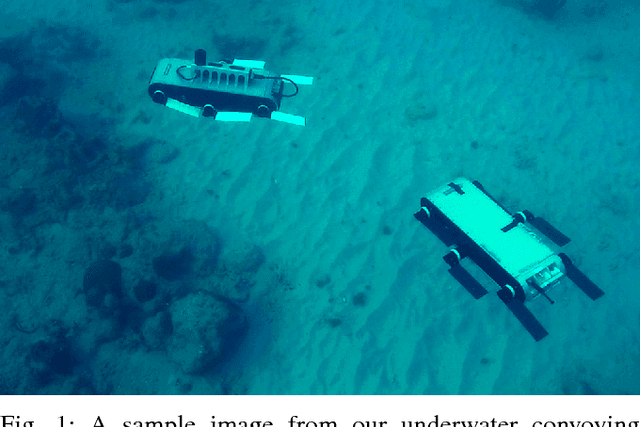
We present a robust multi-robot convoying approach that relies on visual detection of the leading agent, thus enabling target following in unstructured 3-D environments. Our method is based on the idea of tracking-by-detection, which interleaves efficient model-based object detection with temporal filtering of image-based bounding box estimation. This approach has the important advantage of mitigating tracking drift (i.e. drifting away from the target object), which is a common symptom of model-free trackers and is detrimental to sustained convoying in practice. To illustrate our solution, we collected extensive footage of an underwater robot in ocean settings, and hand-annotated its location in each frame. Based on this dataset, we present an empirical comparison of multiple tracker variants, including the use of several convolutional neural networks, both with and without recurrent connections, as well as frequency-based model-free trackers. We also demonstrate the practicality of this tracking-by-detection strategy in real-world scenarios by successfully controlling a legged underwater robot in five degrees of freedom to follow another robot's independent motion.