 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePotential-Guided Flow Matching for Vision-Language-Action Policy Improvement
Jun 03, 2026Large vision-language-action (VLA) policies are increasingly trained as conditional generative models over action chunks. Yet deployment produces mixed-quality experience-successful demonstrations, partial completions, recoverable mistakes, and failures-that is difficult to use with standard imitation. Full behavior cloning (BC) imitates failures, filtered BC discards useful sub-trajectories, and offline reinforcement learning adds a large critic. We introduce ForesightFlow, a self-guided flow-matching policy that augments each generated action chunk with a learned success-potential trajectory. The same flow proposes and scores candidate actions, enabling best-of-$K$ inference without an external critic. The key issue is that policy improvement and value calibration require different supervision: advantage weighting should emphasize high-quality actions, but applying the same weights to potential coordinates suppresses failure gradients and creates overconfident scores. We address this with decoupled advantage-weighted flow matching, applying exponentiated advantage weights only to action velocities while training potential velocities uniformly. We further derive a one-step boundary estimator for conditional flow matching, allowing advantage computation with a single stop-gradient forward pass. Across five BEHAVIOR-1K simulation tasks and five real-world bimanual tasks, ForesightFlow improves over imitation baselines, matches the strongest separate-critic baseline in simulation success, improves real-world success, and reduces training compute by $38\%$. Ablations show that decoupling prevents value hallucination, the one-step estimator preserves candidate-ranking fidelity, and self-guided sampling improves long-horizon execution.
Human Values Matter: Investigating How Misalignment Shapes Collective Behaviors in LLM Agent Communities
Apr 07, 2026As LLMs become increasingly integrated into human society, evaluating their orientations on human values from social science has drawn growing attention. Nevertheless, it is still unclear why human values matter for LLMs, especially in LLM-based multi-agent systems, where group-level failures may accumulate from individually misaligned actions. We ask whether misalignment with human values alters the collective behavior of LLM agents and what changes it induces? In this work, we introduce CIVA, a controlled multi-agent environment grounded in social science theories, where LLM agents form a community and autonomously communicate, explore, and compete for resources, enabling systematic manipulation of value prevalence and behavioral analysis. Through comprehensive simulation experiments, we reveal three key findings. (1) We identify several structurally critical values that substantially shape the community's collective dynamics, including those diverging from LLMs' original orientations. Triggered by the misspecification of these values, we (2) detect system failure modes, e.g., catastrophic collapse, at the macro level, and (3) observe emergent behaviors like deception and power-seeking at the micro level. These results offer quantitative evidence that human values are essential for collective outcomes in LLMs and motivate future multi-agent value alignment.
UniBioTransfer: A Unified Framework for Multiple Biometrics Transfer
Mar 20, 2026Deepface generation has traditionally followed a task-driven paradigm, where distinct tasks (e.g., face transfer and hair transfer) are addressed by task-specific models. Nevertheless, this single-task setting severely limits model generalization and scalability. A unified model capable of solving multiple deepface generation tasks in a single pass represents a promising and practical direction, yet remains challenging due to data scarcity and cross-task conflicts arising from heterogeneous attribute transformations. To this end, we propose UniBioTransfer, the first unified framework capable of handling both conventional deepface tasks (e.g., face transfer and face reenactment) and shape-varying transformations (e.g., hair transfer and head transfer). Besides, UniBioTransfer naturally generalizes to unseen tasks, like lip, eye, and glasses transfer, with minimal fine-tuning. Generally, UniBioTransfer addresses data insufficiency in multi-task generation through a unified data construction strategy, including a swapping-based corruption mechanism designed for spatially dynamic attributes like hair. It further mitigates cross-task interference via an innovative BioMoE, a mixture-of-experts based model coupled with a novel two-stage training strategy that effectively disentangles task-specific knowledge. Extensive experiments demonstrate the effectiveness, generalization, and scalability of UniBioTransfer, outperforming both existing unified models and task-specific methods across a wide range of deepface generation tasks. Project page is at https://scy639.github.io/UniBioTransfer.github.io/
An Efficient Gradient-Aware Error-Bounded Lossy Compressor for Federated Learning
Nov 07, 2025Federated learning (FL) enables collaborative model training without exposing clients' private data, but its deployment is often constrained by the communication cost of transmitting gradients between clients and the central server, especially under system heterogeneity where low-bandwidth clients bottleneck overall performance. Lossy compression of gradient data can mitigate this overhead, and error-bounded lossy compression (EBLC) is particularly appealing for its fine-grained utility-compression tradeoff. However, existing EBLC methods (e.g., SZ), originally designed for smooth scientific data with strong spatial locality, rely on generic predictors such as Lorenzo and interpolation for entropy reduction to improve compression ratio. Gradient tensors, in contrast, exhibit low smoothness and weak spatial correlation, rendering these predictors ineffective and leading to poor compression ratios. To address this limitation, we propose an EBLC framework tailored for FL gradient data to achieve high compression ratios while preserving model accuracy. The core of it is an innovative prediction mechanism that exploits temporal correlations across FL training rounds and structural regularities within convolutional kernels to reduce residual entropy. The predictor is compatible with standard quantizers and entropy coders and comprises (1) a cross-round magnitude predictor based on a normalized exponential moving average, and (2) a sign predictor that leverages gradient oscillation and kernel-level sign consistency. Experiments show that this new EBLC yields up to 1.53x higher compression ratios than SZ3 with lower accuracy loss. Integrated into a real-world FL framework, APPFL, it reduces end-to-end communication time by 76.1%-96.2% under various constrained-bandwidth scenarios, demonstrating strong scalability for real-world FL deployments.
Affordance-R1: Reinforcement Learning for Generalizable Affordance Reasoning in Multimodal Large Language Model
Aug 08, 2025Affordance grounding focuses on predicting the specific regions of objects that are associated with the actions to be performed by robots. It plays a vital role in the fields of human-robot interaction, human-object interaction, embodied manipulation, and embodied perception. Existing models often neglect the affordance shared among different objects because they lack the Chain-of-Thought(CoT) reasoning abilities, limiting their out-of-domain (OOD) generalization and explicit reasoning capabilities. To address these challenges, we propose Affordance-R1, the first unified affordance grounding framework that integrates cognitive CoT guided Group Relative Policy Optimization (GRPO) within a reinforcement learning paradigm. Specifically, we designed a sophisticated affordance function, which contains format, perception, and cognition rewards to effectively guide optimization directions. Furthermore, we constructed a high-quality affordance-centric reasoning dataset, ReasonAff, to support training. Trained exclusively via reinforcement learning with GRPO and without explicit reasoning data, Affordance-R1 achieves robust zero-shot generalization and exhibits emergent test-time reasoning capabilities. Comprehensive experiments demonstrate that our model outperforms well-established methods and exhibits open-world generalization. To the best of our knowledge, Affordance-R1 is the first to integrate GRPO-based RL with reasoning into affordance reasoning. The code of our method and our dataset is released on https://github.com/hq-King/Affordance-R1.
STAGE: A Stream-Centric Generative World Model for Long-Horizon Driving-Scene Simulation
Jun 16, 2025The generation of temporally consistent, high-fidelity driving videos over extended horizons presents a fundamental challenge in autonomous driving world modeling. Existing approaches often suffer from error accumulation and feature misalignment due to inadequate decoupling of spatio-temporal dynamics and limited cross-frame feature propagation mechanisms. To address these limitations, we present STAGE (Streaming Temporal Attention Generative Engine), a novel auto-regressive framework that pioneers hierarchical feature coordination and multi-phase optimization for sustainable video synthesis. To achieve high-quality long-horizon driving video generation, we introduce Hierarchical Temporal Feature Transfer (HTFT) and a novel multi-stage training strategy. HTFT enhances temporal consistency between video frames throughout the video generation process by modeling the temporal and denoising process separately and transferring denoising features between frames. The multi-stage training strategy is to divide the training into three stages, through model decoupling and auto-regressive inference process simulation, thereby accelerating model convergence and reducing error accumulation. Experiments on the Nuscenes dataset show that STAGE has significantly surpassed existing methods in the long-horizon driving video generation task. In addition, we also explored STAGE's ability to generate unlimited-length driving videos. We generated 600 frames of high-quality driving videos on the Nuscenes dataset, which far exceeds the maximum length achievable by existing methods.
Vaiage: A Multi-Agent Solution to Personalized Travel Planning
May 16, 2025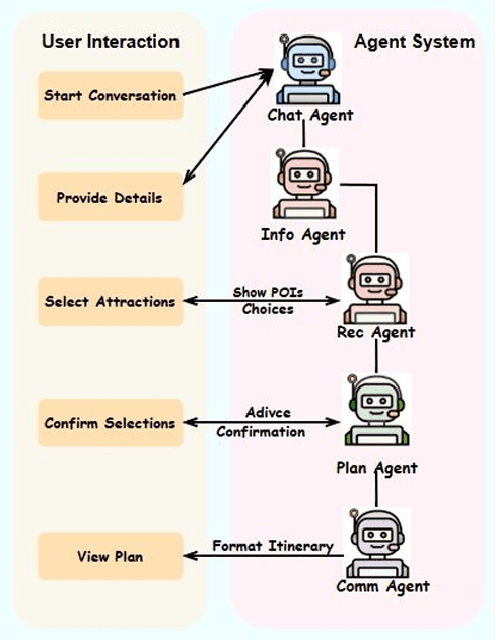
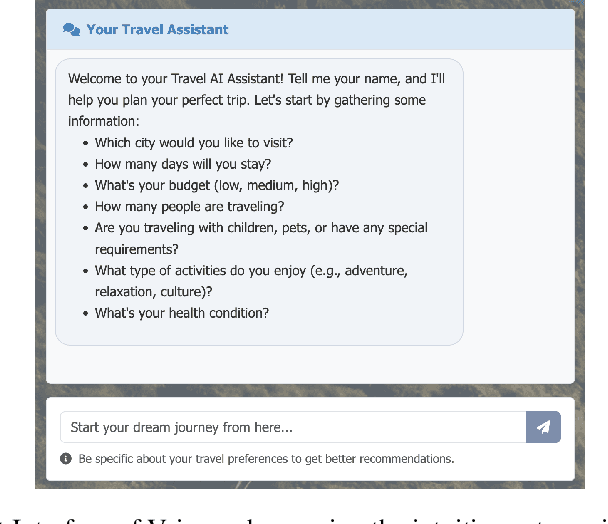
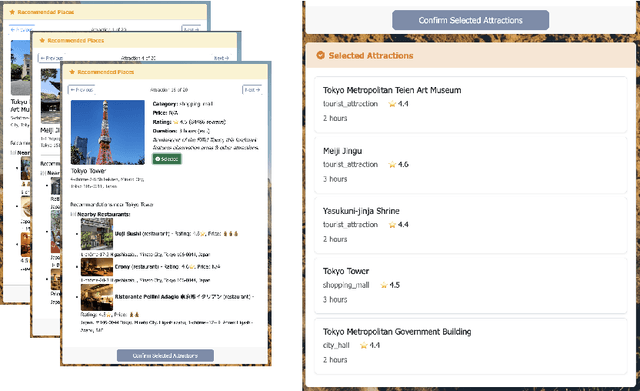
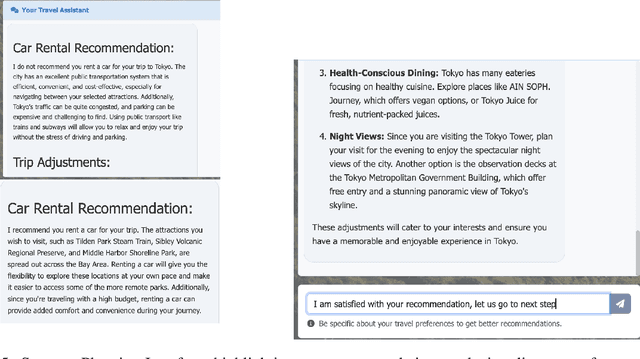
Planning trips is a cognitively intensive task involving conflicting user preferences, dynamic external information, and multi-step temporal-spatial optimization. Traditional platforms often fall short - they provide static results, lack contextual adaptation, and fail to support real-time interaction or intent refinement. Our approach, Vaiage, addresses these challenges through a graph-structured multi-agent framework built around large language models (LLMs) that serve as both goal-conditioned recommenders and sequential planners. LLMs infer user intent, suggest personalized destinations and activities, and synthesize itineraries that align with contextual constraints such as budget, timing, group size, and weather. Through natural language interaction, structured tool use, and map-based feedback loops, Vaiage enables adaptive, explainable, and end-to-end travel planning grounded in both symbolic reasoning and conversational understanding. To evaluate Vaiage, we conducted human-in-the-loop experiments using rubric-based GPT-4 assessments and qualitative feedback. The full system achieved an average score of 8.5 out of 10, outperforming the no-strategy (7.2) and no-external-API (6.8) variants, particularly in feasibility. Qualitative analysis indicated that agent coordination - especially the Strategy and Information Agents - significantly improved itinerary quality by optimizing time use and integrating real-time context. These results demonstrate the effectiveness of combining LLM reasoning with symbolic agent coordination in open-ended, real-world planning tasks.
DenseGNN: universal and scalable deeper graph neural networks for high-performance property prediction in crystals and molecules
Jan 05, 2025Generative models generate vast numbers of hypothetical materials, necessitating fast, accurate models for property prediction. Graph Neural Networks (GNNs) excel in this domain but face challenges like high training costs, domain adaptation issues, and over-smoothing. We introduce DenseGNN, which employs Dense Connectivity Network (DCN), Hierarchical Node-Edge-Graph Residual Networks (HRN), and Local Structure Order Parameters Embedding (LOPE) to address these challenges. DenseGNN achieves state-of-the-art performance on datasets such as JARVIS-DFT, Materials Project, and QM9, improving the performance of models like GIN, Schnet, and Hamnet on materials datasets. By optimizing atomic embeddings and reducing computational costs, DenseGNN enables deeper architectures and surpasses other GNNs in crystal structure distinction, approaching X-ray diffraction method accuracy. This advances materials discovery and design.
* DenseGNN optimizes computational efficiency and accuracy in predicting material properties using DCN, HRN, and LOPE. It enhances transferability and overcomes over-smoothing, enabling deep architectures. Performance improvements on JARVIS-DFT, Materials Project, and QM9 datasets advance materials discovery and design
RealDex: Towards Human-like Grasping for Robotic Dexterous Hand
Feb 21, 2024



In this paper, we introduce RealDex, a pioneering dataset capturing authentic dexterous hand grasping motions infused with human behavioral patterns, enriched by multi-view and multimodal visual data. Utilizing a teleoperation system, we seamlessly synchronize human-robot hand poses in real time. This collection of human-like motions is crucial for training dexterous hands to mimic human movements more naturally and precisely. RealDex holds immense promise in advancing humanoid robot for automated perception, cognition, and manipulation in real-world scenarios. Moreover, we introduce a cutting-edge dexterous grasping motion generation framework, which aligns with human experience and enhances real-world applicability through effectively utilizing Multimodal Large Language Models. Extensive experiments have demonstrated the superior performance of our method on RealDex and other open datasets. The complete dataset and code will be made available upon the publication of this work.
Towards Imperceptible Adversarial Image Patches Based on Network Explanations
Dec 10, 2020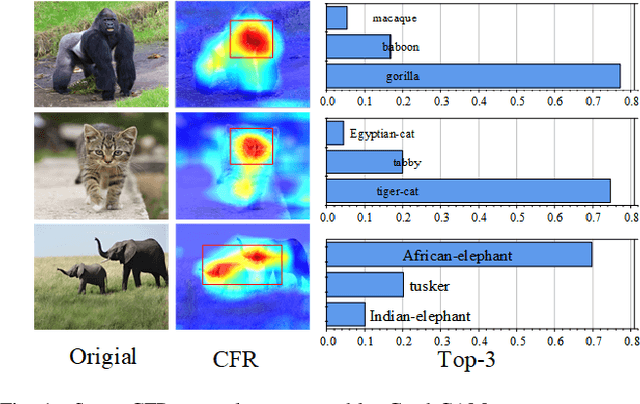
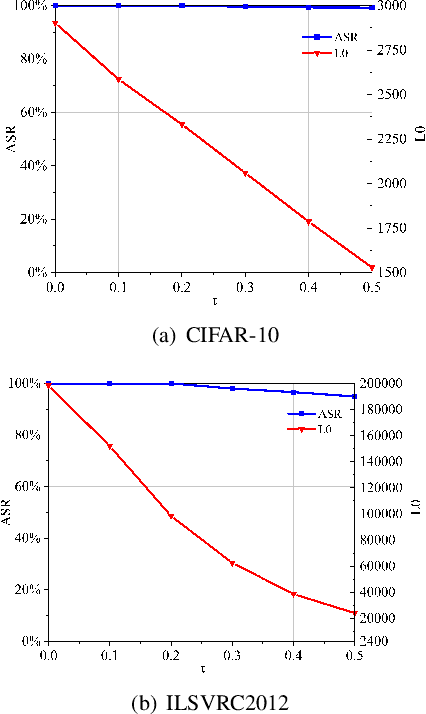
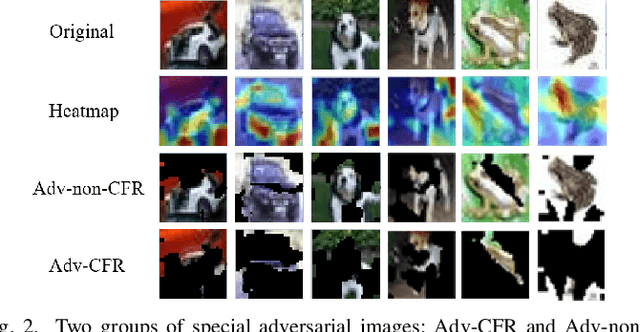
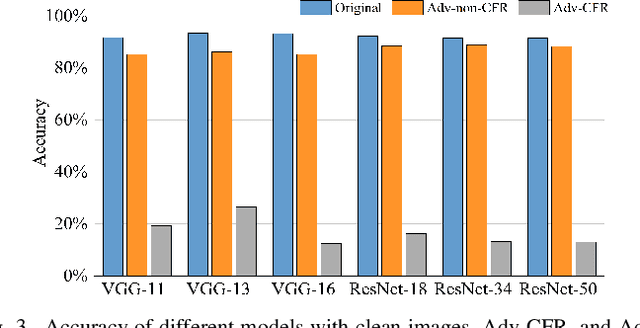
The vulnerability of deep neural networks (DNNs) for adversarial examples have attracted more attention. Many algorithms are proposed to craft powerful adversarial examples. However, these algorithms modifying the global or local region of pixels without taking into account network explanations. Hence, the perturbations are redundancy and easily detected by human eyes. In this paper, we propose a novel method to generate local region perturbations. The main idea is to find the contributing feature regions (CFRs) of images based on network explanations for perturbations. Due to the network explanations, the perturbations added to the CFRs are more effective than other regions. In our method, a soft mask matrix is designed to represent the CFRs for finely characterizing the contributions of each pixel. Based on this soft mask, we develop a new objective function with inverse temperature to search for optimal perturbations in CFRs. Extensive experiments are conducted on CIFAR-10 and ILSVRC2012, which demonstrate the effectiveness, including attack success rate, imperceptibility,and transferability.