 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Cross-Task Suicide Risk Detection via Speech LLM
Sep 26, 2025Suicide risk among adolescents remains a critical public health concern, and speech provides a non-invasive and scalable approach for its detection. Existing approaches, however, typically focus on one single speech assessment task at a time. This paper, for the first time, investigates cross-task approaches that unify diverse speech suicide risk assessment tasks within a single model. Specifically, we leverage a speech large language model as the backbone and incorporate a mixture of DoRA experts (MoDE) approach to capture complementary cues across diverse assessments dynamically. The proposed approach was tested on 1,223 participants across ten spontaneous speech tasks. Results demonstrate that MoDE not only achieves higher detection accuracy than both single-task specialised models and conventional joint-tuning approaches, but also provides better confidence calibration, which is especially important for medical detection tasks.
GRUtopia: Dream General Robots in a City at Scale
Jul 15, 2024Recent works have been exploring the scaling laws in the field of Embodied AI. Given the prohibitive costs of collecting real-world data, we believe the Simulation-to-Real (Sim2Real) paradigm is a crucial step for scaling the learning of embodied models. This paper introduces project GRUtopia, the first simulated interactive 3D society designed for various robots. It features several advancements: (a) The scene dataset, GRScenes, includes 100k interactive, finely annotated scenes, which can be freely combined into city-scale environments. In contrast to previous works mainly focusing on home, GRScenes covers 89 diverse scene categories, bridging the gap of service-oriented environments where general robots would be initially deployed. (b) GRResidents, a Large Language Model (LLM) driven Non-Player Character (NPC) system that is responsible for social interaction, task generation, and task assignment, thus simulating social scenarios for embodied AI applications. (c) The benchmark, GRBench, supports various robots but focuses on legged robots as primary agents and poses moderately challenging tasks involving Object Loco-Navigation, Social Loco-Navigation, and Loco-Manipulation. We hope that this work can alleviate the scarcity of high-quality data in this field and provide a more comprehensive assessment of Embodied AI research. The project is available at https://github.com/OpenRobotLab/GRUtopia.
Spatio-temporal Motion Planning for Autonomous Vehicles with Trapezoidal Prism Corridors and Bézier Curves
Sep 30, 2022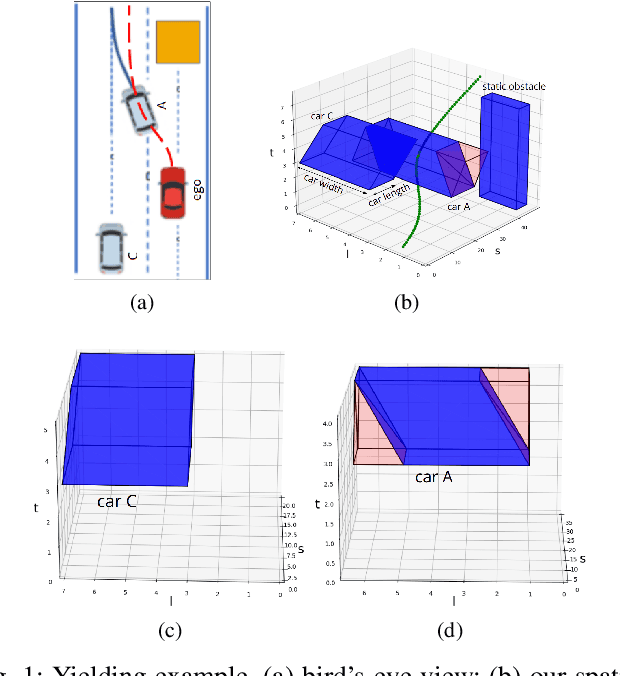
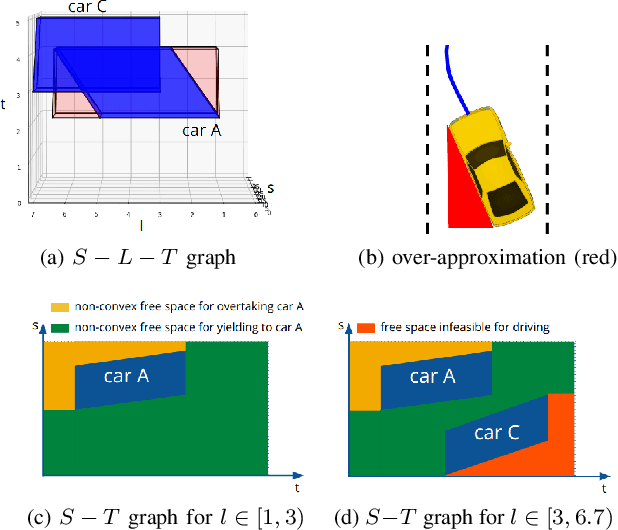

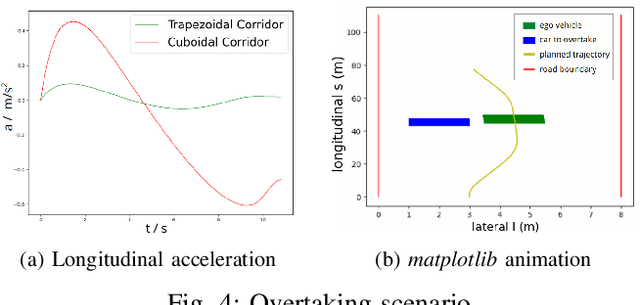
Safety-guaranteed motion planning is critical for self-driving cars to generate collision-free trajectories. A layered motion planning approach with decoupled path and speed planning is widely used for this purpose. This approach is prone to be suboptimal in the presence of dynamic obstacles. Spatial-temporal approaches deal with path planning and speed planning simultaneously; however, the existing methods only support simple-shaped corridors like cuboids, which restrict the search space for optimization in complex scenarios. We propose to use trapezoidal prism-shaped corridors for optimization, which significantly enlarges the solution space compared to the existing cuboidal corridors-based method. Finally, a piecewise B\'{e}zier curve optimization is conducted in our proposed corridors. This formulation theoretically guarantees the safety of the continuous-time trajectory. We validate the efficiency and effectiveness of the proposed approach in numerical and CommonRoad simulations.
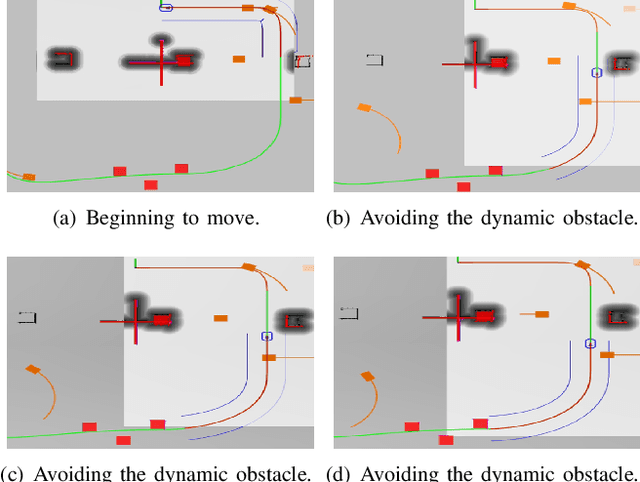
Moving Target Interception Considering Dynamic Environment
May 16, 2022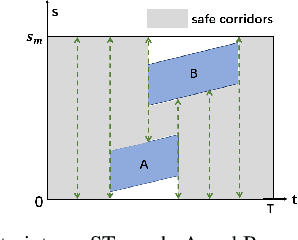

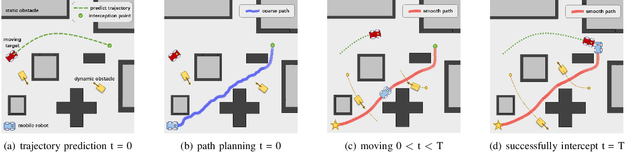
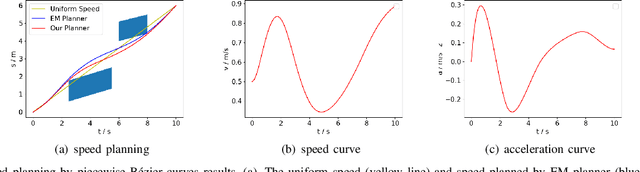
The interception of moving targets is a widely studied issue. In this paper, we propose an algorithm of intercepting the moving target with a wheeled mobile robot in a dynamic environment. We first predict the future position of the target through polynomial fitting. The algorithm then generates an interception trajectory with path and speed decoupling. We use Hybrid A* search to plan a path and optimize it via gradient decent method. To avoid the dynamic obstacles in the environment, we introduce ST graph for speed planning. The speed curve is represented by piecewise B\'ezier curves for further optimization. Compared with other interception algorithms, we consider a dynamic environment and plan a safety trajectory which satisfies the kinematic characteristics of the wheeled robot while ensuring the accuracy of interception. Simulation illustrates that the algorithm successfully achieves the interception tasks and has high computational efficiency.
Speed Planning Using Bezier Polynomials with Trapezoidal Corridors
Apr 23, 2021
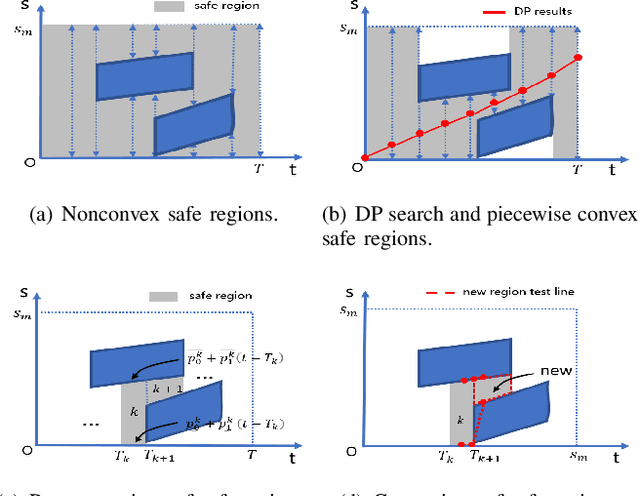
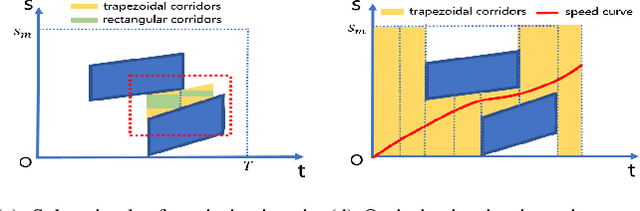
To generate safe and real-time trajectories for an autonomous vehicle in dynamic environments, path and speed decoupled planning methods are often considered. This paper studies speed planning, which mainly deals with dynamic obstacle avoidance given the planning path. The main challenges lie in the decisions in non-convex space and the trade-off between safety, comfort and efficiency performances. This work uses dynamic programming to search heuristic waypoints on the S-T graph and to construct convex feasible spaces. Further, a piecewise Bezier polynomials optimization approach with trapezoidal corridors is presented, which theoretically guarantees the safety and optimality of the trajectory. The simulations verify the effectiveness of the proposed approach.