 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpeed Planning Using Bezier Polynomials with Trapezoidal Corridors
Apr 23, 2021
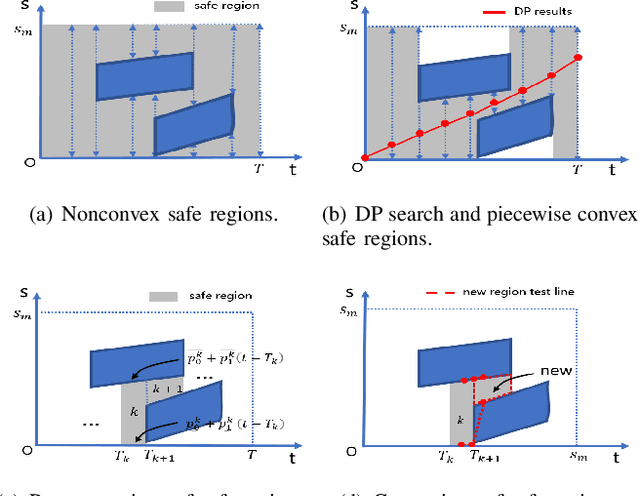
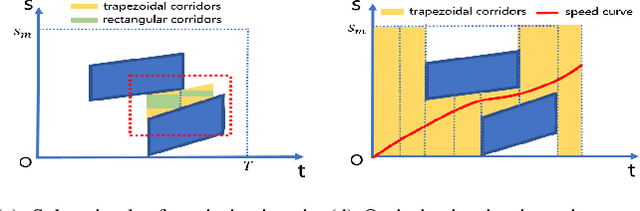
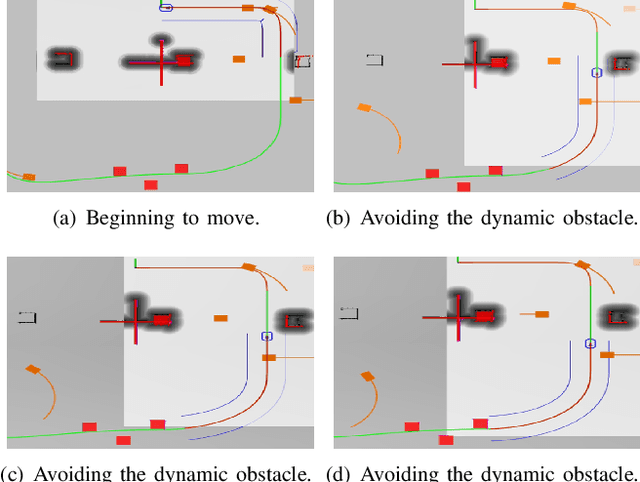
To generate safe and real-time trajectories for an autonomous vehicle in dynamic environments, path and speed decoupled planning methods are often considered. This paper studies speed planning, which mainly deals with dynamic obstacle avoidance given the planning path. The main challenges lie in the decisions in non-convex space and the trade-off between safety, comfort and efficiency performances. This work uses dynamic programming to search heuristic waypoints on the S-T graph and to construct convex feasible spaces. Further, a piecewise Bezier polynomials optimization approach with trapezoidal corridors is presented, which theoretically guarantees the safety and optimality of the trajectory. The simulations verify the effectiveness of the proposed approach.
Robust Visual SLAM with Point and Line Features
Nov 23, 2017



In this paper, we develop a robust efficient visual SLAM system that utilizes heterogeneous point and line features. By leveraging ORB-SLAM [1], the proposed system consists of stereo matching, frame tracking, local mapping, loop detection, and bundle adjustment of both point and line features. In particular, as the main theoretical contributions of this paper, we, for the first time, employ the orthonormal representation as the minimal parameterization to model line features along with point features in visual SLAM and analytically derive the Jacobians of the re-projection errors with respect to the line parameters, which significantly improves the SLAM solution. The proposed SLAM has been extensively tested in both synthetic and real-world experiments whose results demonstrate that the proposed system outperforms the state-of-the-art methods in various scenarios.