 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Objective Multi-Fidelity Bayesian Optimization with Causal Priors
Jan 31, 2026Multi-fidelity Bayesian optimization (MFBO) accelerates the search for the global optimum of black-box functions by integrating inexpensive, low-fidelity approximations. The central task of an MFBO policy is to balance the cost-efficiency of low-fidelity proxies against their reduced accuracy to ensure effective progression toward the high-fidelity optimum. Existing MFBO methods primarily capture associational dependencies between inputs, fidelities, and objectives, rather than causal mechanisms, and can perform poorly when lower-fidelity proxies are poorly aligned with the target fidelity. We propose RESCUE (REducing Sampling cost with Causal Understanding and Estimation), a multi-objective MFBO method that incorporates causal calculus to systematically address this challenge. RESCUE learns a structural causal model capturing causal relationships between inputs, fidelities, and objectives, and uses it to construct a probabilistic multi-fidelity (MF) surrogate that encodes intervention effects. Exploiting the causal structure, we introduce a causal hypervolume knowledge-gradient acquisition strategy to select input-fidelity pairs that balance expected multi-objective improvement and cost. We show that RESCUE improves sample efficiency over state-of-the-art MF optimization methods on synthetic and real-world problems in robotics, machine learning (AutoML), and healthcare.
SHRUMS: Sensor Hallucination for Real-time Underwater Motion Planning with a Compact 3D Sonar
Oct 21, 2025Autonomous navigation in 3D is a fundamental problem for autonomy. Despite major advancements in terrestrial and aerial settings due to improved range sensors including LiDAR, compact sensors with similar capabilities for underwater robots have only recently become available, in the form of 3D sonars. This paper introduces a novel underwater 3D navigation pipeline, called SHRUMS (Sensor Hallucination for Robust Underwater Motion planning with 3D Sonar). To the best of the authors' knowledge, SHRUMS is the first underwater autonomous navigation stack to integrate a 3D sonar. The proposed pipeline exhibits strong robustness while operating in complex 3D environments in spite of extremely poor visibility conditions. To accommodate the intricacies of the novel sensor data stream while achieving real-time locally optimal performance, SHRUMS introduces the concept of hallucinating sensor measurements from non-existent sensors with convenient arbitrary parameters, tailored to application specific requirements. The proposed concepts are validated with real 3D sonar sensor data, utilizing real inputs in challenging settings and local maps constructed in real-time. Field deployments validating the proposed approach in full are planned in the very near future.
Estimating Spatially-Dependent GPS Errors Using a Swarm of Robots
Jun 24, 2025External factors, including urban canyons and adversarial interference, can lead to Global Positioning System (GPS) inaccuracies that vary as a function of the position in the environment. This study addresses the challenge of estimating a static, spatially-varying error function using a team of robots. We introduce a State Bias Estimation Algorithm (SBE) whose purpose is to estimate the GPS biases. The central idea is to use sensed estimates of the range and bearing to the other robots in the team to estimate changes in bias across the environment. A set of drones moves in a 2D environment, each sampling data from GPS, range, and bearing sensors. The biases calculated by the SBE at estimated positions are used to train a Gaussian Process Regression (GPR) model. We use a Sparse Gaussian process-based Informative Path Planning (IPP) algorithm that identifies high-value regions of the environment for data collection. The swarm plans paths that maximize information gain in each iteration, further refining their understanding of the environment's positional bias landscape. We evaluated SBE and IPP in simulation and compared the IPP methodology to an open-loop strategy.
Limits of specifiability for sensor-based robotic planning tasks
Mar 07, 2025There is now a large body of techniques, many based on formal methods, for describing and realizing complex robotics tasks, including those involving a variety of rich goals and time-extended behavior. This paper explores the limits of what sorts of tasks are specifiable, examining how the precise grounding of specifications, that is, whether the specification is given in terms of the robot's states, its actions and observations, its knowledge, or some other information,is crucial to whether a given task can be specified. While prior work included some description of particular choices for this grounding, our contribution treats this aspect as a first-class citizen: we introduce notation to deal with a large class of problems, and examine how the grounding affects what tasks can be posed. The results demonstrate that certain classes of tasks are specifiable under different combinations of groundings.
A Model for Optimal Resilient Planning Subject to Fallible Actuators
May 18, 2024Robots incurring component failures ought to adapt their behavior to best realize still-attainable goals under reduced capacity. We formulate the problem of planning with actuators known a priori to be susceptible to failure within the Markov Decision Processes (MDP) framework. The model captures utilization-driven malfunction and state-action dependent likelihoods of actuator failure in order to enable reasoning about potential impairment and the long-term implications of impoverished future control. This leads to behavior differing qualitatively from plans which ignore failure. As actuators malfunction, there are combinatorially many configurations which can arise. We identify opportunities to save computation through re-use, exploiting the observation that differing configurations yield closely related problems. Our results show how strategic solutions are obtained so robots can respond when failures do occur -- for instance, in prudently scheduling utilization in order to keep critical actuators in reserve.
CURE: Simulation-Augmented Auto-Tuning in Robotics
Feb 08, 2024



Robotic systems are typically composed of various subsystems, such as localization and navigation, each encompassing numerous configurable components (e.g., selecting different planning algorithms). Once an algorithm has been selected for a component, its associated configuration options must be set to the appropriate values. Configuration options across the system stack interact non-trivially. Finding optimal configurations for highly configurable robots to achieve desired performance poses a significant challenge due to the interactions between configuration options across software and hardware that result in an exponentially large and complex configuration space. These challenges are further compounded by the need for transferability between different environments and robotic platforms. Data efficient optimization algorithms (e.g., Bayesian optimization) have been increasingly employed to automate the tuning of configurable parameters in cyber-physical systems. However, such optimization algorithms converge at later stages, often after exhausting the allocated budget (e.g., optimization steps, allotted time) and lacking transferability. This paper proposes CURE -- a method that identifies causally relevant configuration options, enabling the optimization process to operate in a reduced search space, thereby enabling faster optimization of robot performance. CURE abstracts the causal relationships between various configuration options and robot performance objectives by learning a causal model in the source (a low-cost environment such as the Gazebo simulator) and applying the learned knowledge to perform optimization in the target (e.g., Turtlebot 3 physical robot). We demonstrate the effectiveness and transferability of CURE by conducting experiments that involve varying degrees of deployment changes in both physical robots and simulation.
CaRE: Finding Root Causes of Configuration Issues in Highly-Configurable Robots
Jan 18, 2023



Robotic systems have several subsystems that possess a huge combinatorial configuration space and hundreds or even thousands of possible software and hardware configuration options interacting non-trivially. The configurable parameters can be tailored to target specific objectives, but when incorrectly configured, can cause functional faults. Finding the root cause of such faults is challenging due to the exponentially large configuration space and the dependencies between the robot's configuration settings and performance. This paper proposes CaRE, a method for diagnosing the root cause of functional faults through the lens of causality, which abstracts the causal relationships between various configuration options and the robot's performance objectives. We demonstrate CaRE's efficacy by finding the root cause of the observed functional faults via CaRE and validating the diagnosed root cause, conducting experiments in both physical robots (Husky and Turtlebot 3) and in simulation (Gazebo). Furthermore, we demonstrate that the causal models learned from robots in simulation (simulating Husky in Gazebo) are transferable to physical robots across different platforms (Turtlebot 3).
AquaVis: A Perception-Aware Autonomous Navigation Framework for Underwater Vehicles
Oct 04, 2021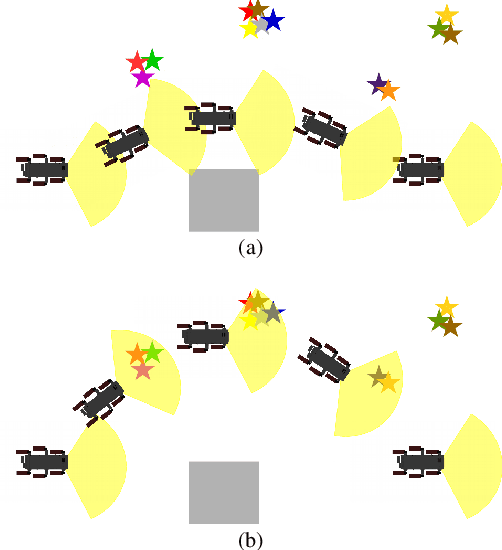
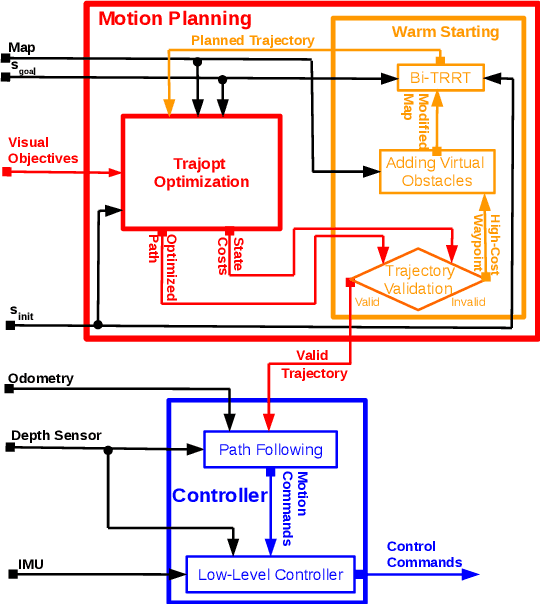
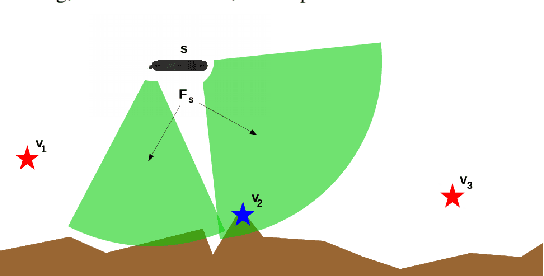
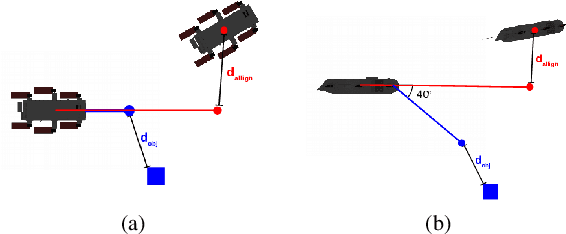
Visual monitoring operations underwater require both observing the objects of interest in close-proximity, and tracking the few feature-rich areas necessary for state estimation.This paper introduces the first navigation framework, called AquaVis, that produces on-line visibility-aware motion plans that enable Autonomous Underwater Vehicles (AUVs) to track multiple visual objectives with an arbitrary camera configuration in real-time. Using the proposed pipeline, AUVs can efficiently move in 3D, reach their goals while avoiding obstacles safely, and maximizing the visibility of multiple objectives along the path within a specified proximity. The method is sufficiently fast to be executed in real-time and is suitable for single or multiple camera configurations. Experimental results show the significant improvement on tracking multiple automatically-extracted points of interest, with low computational overhead and fast re-planning times
Robust-by-Design Plans for Multi-Robot Pursuit-Evasion
Sep 17, 2021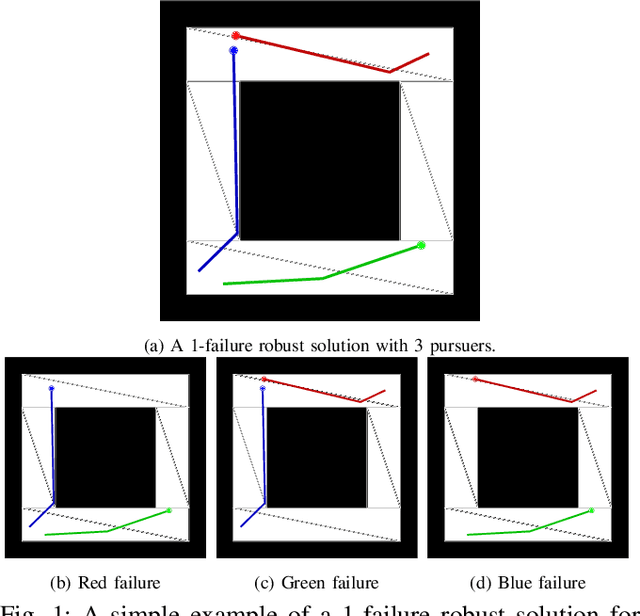
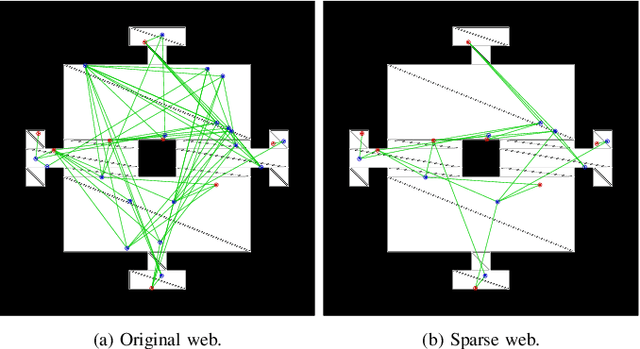
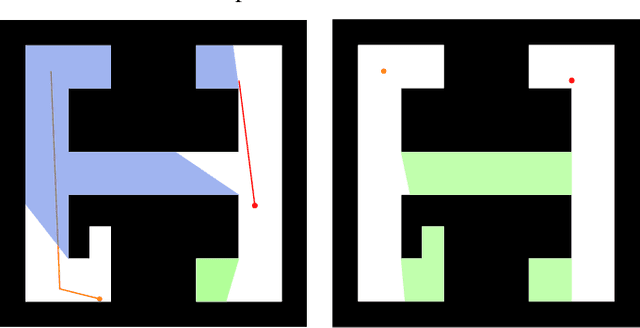
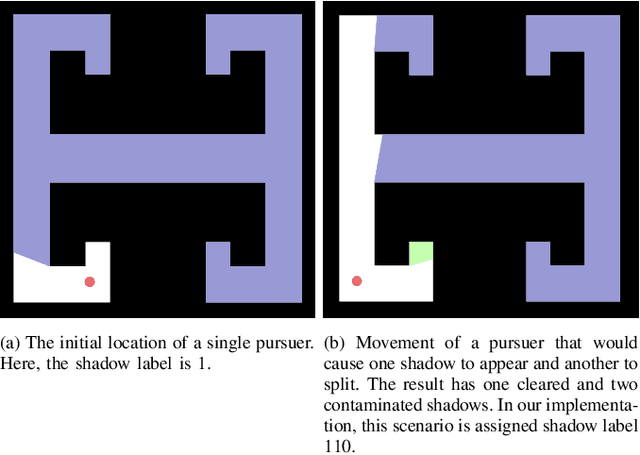
This paper studies a multi-robot visibility-based pursuit-evasion problem in which a group of pursuer robots are tasked with detecting an evader within a two dimensional polygonal environment. The primary contribution is a novel formulation of the pursuit-evasion problem that modifies the pursuers' objective by requiring that the evader still be detected, even in spite of the failure of any single pursuer robot. This novel constraint, whereby two pursuers are required to detect an evader, has the benefit of providing redundancy to the search, should any member of the team become unresponsive, suffer temporary sensor disruption/failure, or otherwise become incapacitated. Existing methods, even those that are designed to respond to failures, rely on the pursuers to replan and update their search pattern to handle such occurrences. In contrast, the proposed formulation produces plans that are inherently tolerant of some level of disturbance. Building upon this new formulation, we introduce an augmented data structure for encoding the problem state and a novel sampling technique to ensure that the generated plans are robust to failures of any single pursuer robot. An implementation and simulation results illustrating the effectiveness of this approach are described.
Rapid Recovery from Robot Failures in Multi-Robot Visibility-Based Pursuit-Evasion
Apr 08, 2021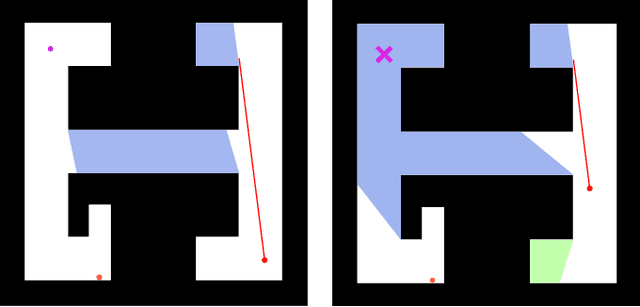
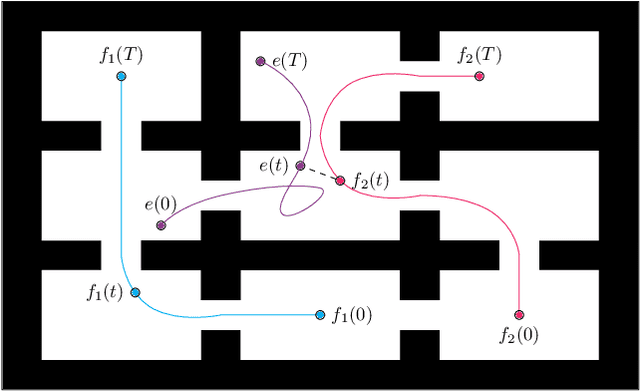
This paper addresses the visibility-based pursuit-evasion problem where a team of pursuer robots operating in a two-dimensional polygonal space seek to establish visibility of an arbitrarily fast evader. This is a computationally challenging task for which the best known complete algorithm takes time doubly exponential in the number of robots. However, recent advances that utilize sampling-based methods have shown progress in generating feasible solutions. An aspect of this problem that has yet to be explored concerns how to ensure that the robots can recover from catastrophic failures which leave one or more robots unexpectedly incapable of continuing to contribute to the pursuit of the evader. To address this issue, we propose an algorithm that can rapidly recover from catastrophic failures. When such failures occur, a replanning occurs, leveraging both the information retained from the previous iteration and the partial progress of the search completed before the failure to generate a new motion strategy for the reduced team of pursuers. We describe an implementation of this algorithm and provide quantitative results that show that the proposed method is able to recover from robot failures more rapidly than a baseline approach that plans from scratch.