 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAquaVis: A Perception-Aware Autonomous Navigation Framework for Underwater Vehicles
Oct 04, 2021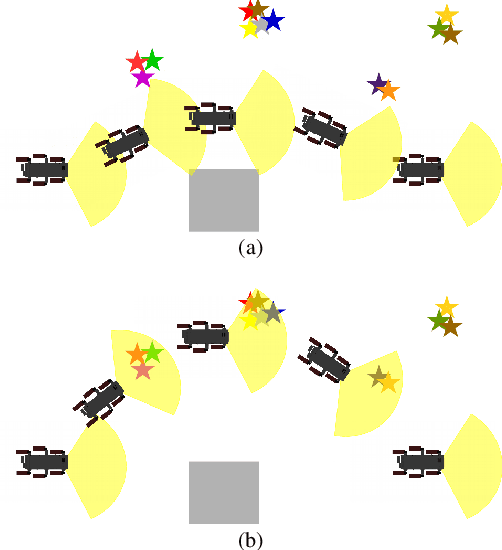
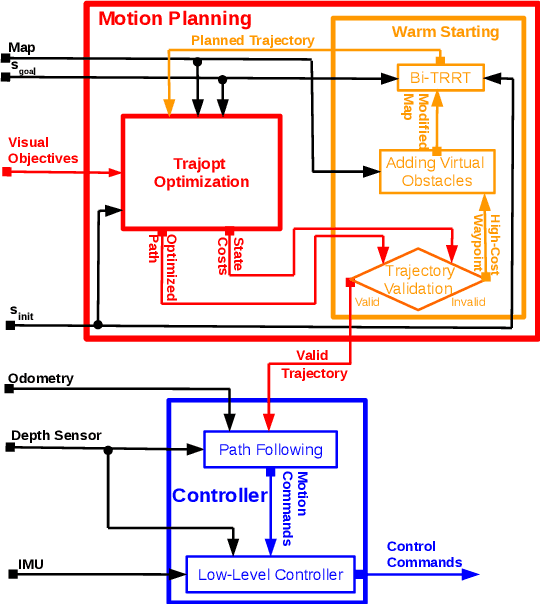
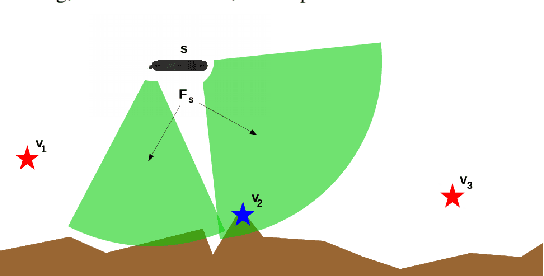
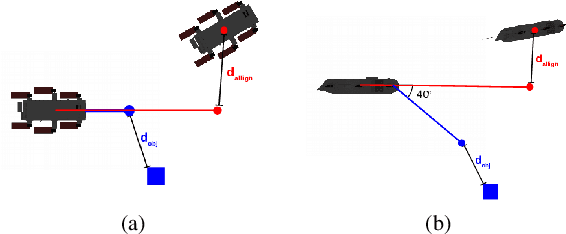
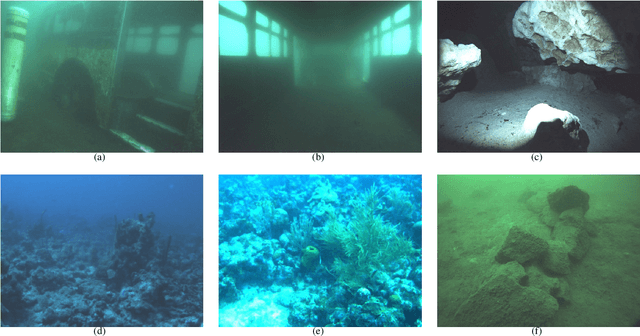
Visual monitoring operations underwater require both observing the objects of interest in close-proximity, and tracking the few feature-rich areas necessary for state estimation.This paper introduces the first navigation framework, called AquaVis, that produces on-line visibility-aware motion plans that enable Autonomous Underwater Vehicles (AUVs) to track multiple visual objectives with an arbitrary camera configuration in real-time. Using the proposed pipeline, AUVs can efficiently move in 3D, reach their goals while avoiding obstacles safely, and maximizing the visibility of multiple objectives along the path within a specified proximity. The method is sufficiently fast to be executed in real-time and is suitable for single or multiple camera configurations. Experimental results show the significant improvement on tracking multiple automatically-extracted points of interest, with low computational overhead and fast re-planning times
Experimental Comparison of Open Source Visual-Inertial-Based State Estimation Algorithms in the Underwater Domain
Apr 03, 2019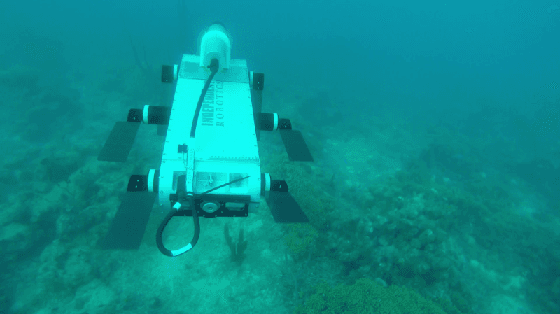
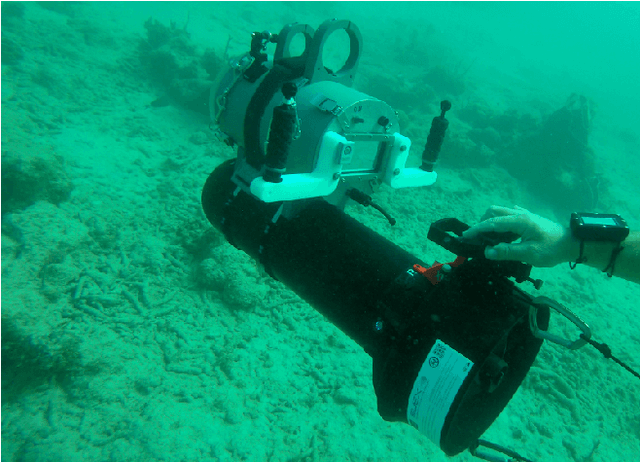
A plethora of state estimation techniques have appeared in the last decade using visual data, and more recently with added inertial data. Datasets typically used for evaluation include indoor and urban environments, where supporting videos have shown impressive performance. However, such techniques have not been fully evaluated in challenging conditions, such as the marine domain. In this paper, we compare ten recent open-source packages to provide insights on their performance and guidelines on addressing current challenges. Specifically, we selected direct methods and tightly-coupled optimization techniques that fuse camera and Inertial Measurement Unit (IMU) data together. Experiments are conducted by testing all packages on datasets collected over the years with underwater robots in our laboratory. All the datasets are made available online.
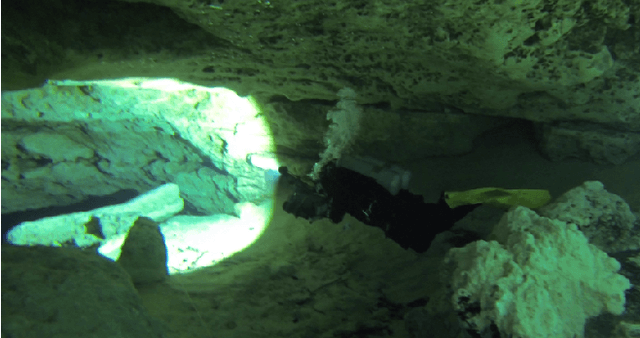
Navigation in the Presence of Obstacles for an Agile Autonomous Underwater Vehicle
Mar 28, 2019
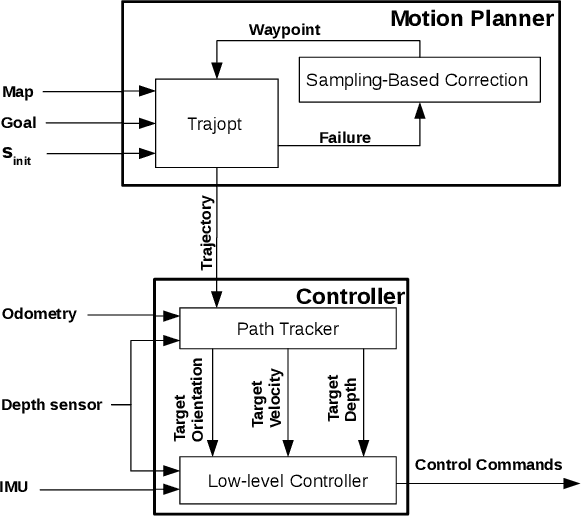
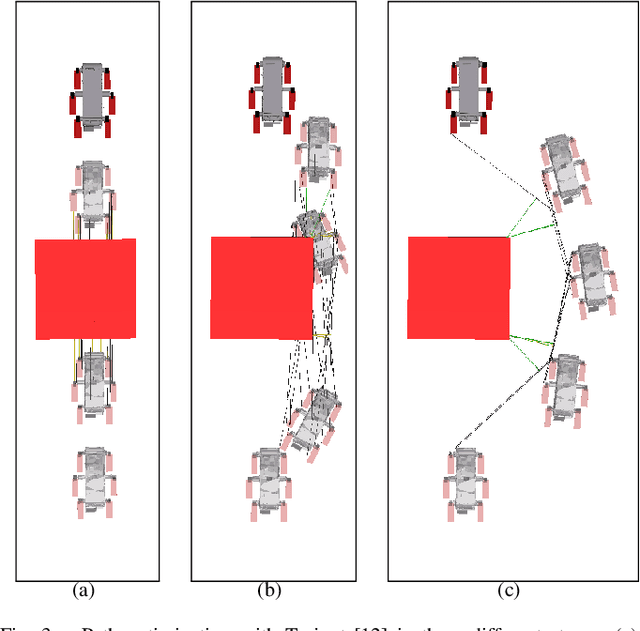
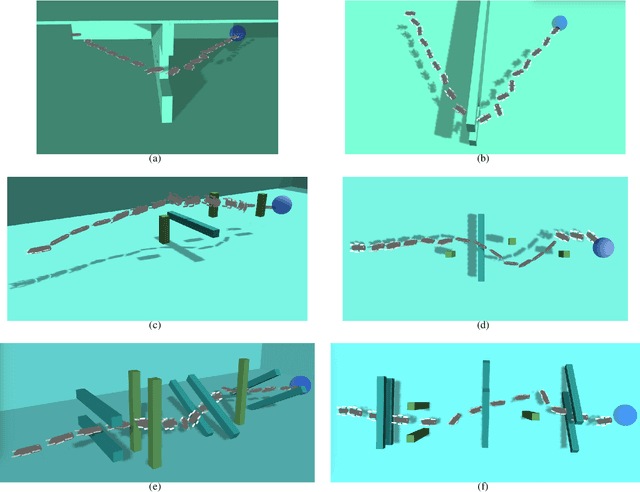
Navigation underwater traditionally is done by keeping a safe distance from obstacles, resulting in "fly-overs" of the area of interest. An Autonomous Underwater Vehicle (AUV) moving through a cluttered space, such as a shipwreck, or a decorated cave is an extremely challenging problem and has not been addressed in the past. This paper proposed a novel navigation framework utilizing an enhanced version of Trajopt for fast 3D path-optimization with near-optimal guarantees for AUVs. A sampling based correction procedure ensures that the planning is not limited by local minima, enabling navigation through narrow spaces. The method is shown, both on simulation and in-pool experiments, to be fast enough to enable real-time autonomous navigation for an Aqua2 AUV with strong safety guarantees.
An Interactive Machine Learning Framework
Oct 18, 2016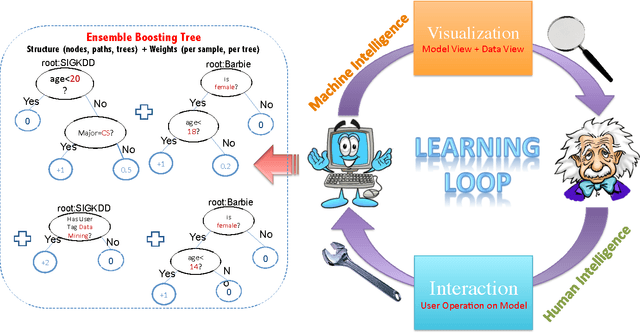
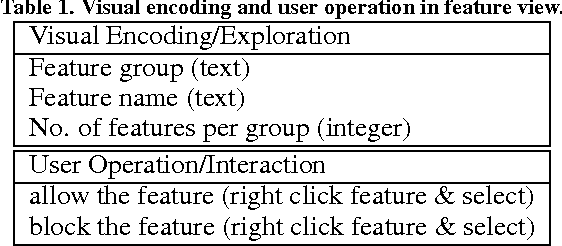
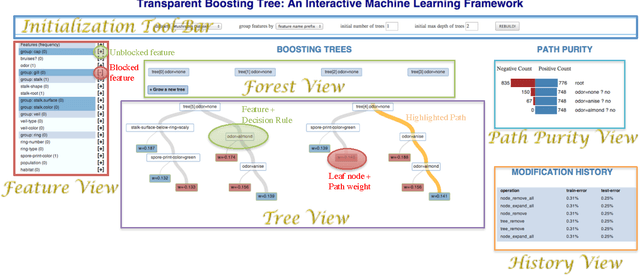
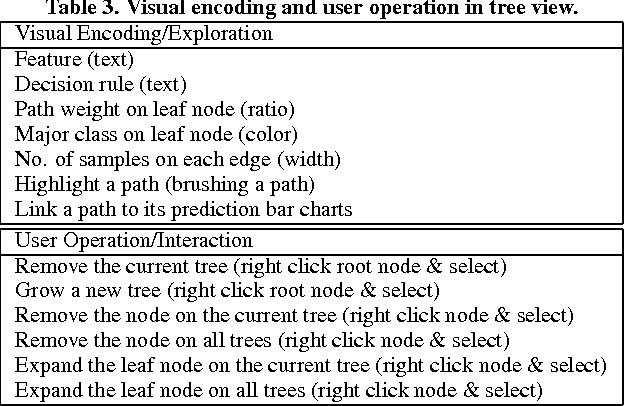
Machine learning (ML) is believed to be an effective and efficient tool to build reliable prediction model or extract useful structure from an avalanche of data. However, ML is also criticized by its difficulty in interpretation and complicated parameter tuning. In contrast, visualization is able to well organize and visually encode the entangled information in data and guild audiences to simpler perceptual inferences and analytic thinking. But large scale and high dimensional data will usually lead to the failure of many visualization methods. In this paper, we close a loop between ML and visualization via interaction between ML algorithm and users, so machine intelligence and human intelligence can cooperate and improve each other in a mutually rewarding way. In particular, we propose "transparent boosting tree (TBT)", which visualizes both the model structure and prediction statistics of each step in the learning process of gradient boosting tree to user, and involves user's feedback operations to trees into the learning process. In TBT, ML is in charge of updating weights in learning model and filtering information shown to user from the big data, while visualization is in charge of providing a visual understanding of ML model to facilitate user exploration. It combines the advantages of both ML in big data statistics and human in decision making based on domain knowledge. We develop a user friendly interface for this novel learning method, and apply it to two datasets collected from real applications. Our study shows that making ML transparent by using interactive visualization can significantly improve the exploration of ML algorithms, give rise to novel insights of ML models, and integrates both machine and human intelligence.