 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Visual Inertial SLAM with Magnetic Measurements
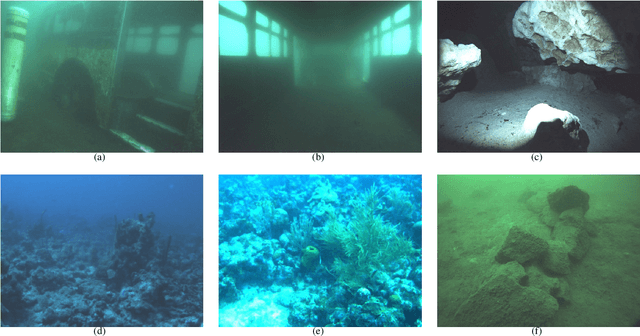
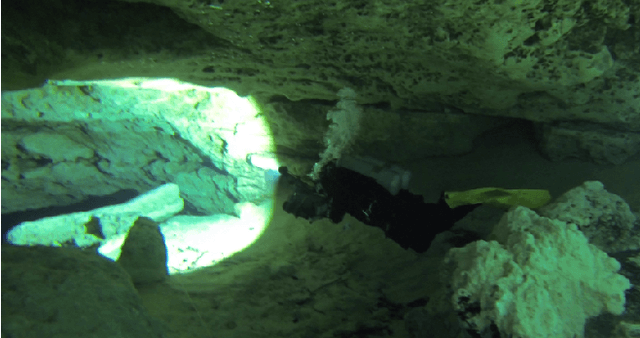
Sep 16, 2024This paper presents an extension to visual inertial odometry (VIO) by introducing tightly-coupled fusion of magnetometer measurements. A sliding window of keyframes is optimized by minimizing re-projection errors, relative inertial errors, and relative magnetometer orientation errors. The results of IMU orientation propagation are used to efficiently transform magnetometer measurements between frames producing relative orientation constraints between consecutive frames. The soft and hard iron effects are calibrated using an ellipsoid fitting algorithm. The introduction of magnetometer data results in significant reductions in the orientation error and also in recovery of the true yaw orientation with respect to the magnetic north. The proposed framework operates in all environments with slow-varying magnetic fields, mainly outdoors and underwater. We have focused our work on the underwater domain, especially in underwater caves, as the narrow passage and turbulent flow make it difficult to perform loop closures and reset the localization drift. The underwater caves present challenges to VIO due to the absence of ambient light and the confined nature of the environment, while also being a crucial source of fresh water and providing valuable historical records. Experimental results from underwater caves demonstrate the improvements in accuracy and robustness introduced by the proposed VIO extension.
Real-Time Dense 3D Mapping of Underwater Environments
Apr 05, 2023



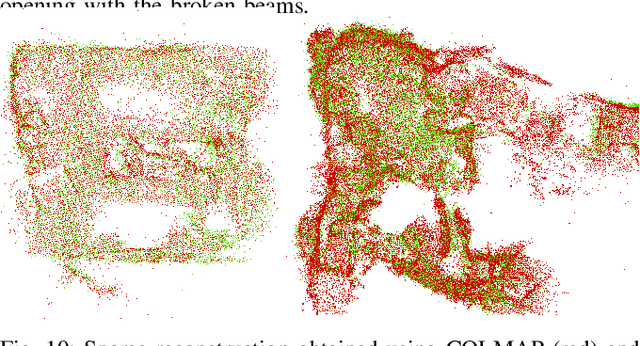
This paper addresses real-time dense 3D reconstruction for a resource-constrained Autonomous Underwater Vehicle (AUV). Underwater vision-guided operations are among the most challenging as they combine 3D motion in the presence of external forces, limited visibility, and absence of global positioning. Obstacle avoidance and effective path planning require online dense reconstructions of the environment. Autonomous operation is central to environmental monitoring, marine archaeology, resource utilization, and underwater cave exploration. To address this problem, we propose to use SVIn2, a robust VIO method, together with a real-time 3D reconstruction pipeline. We provide extensive evaluation on four challenging underwater datasets. Our pipeline produces comparable reconstruction with that of COLMAP, the state-of-the-art offline 3D reconstruction method, at high frame rates on a single CPU.
SM/VIO: Robust Underwater State Estimation Switching Between Model-based and Visual Inertial Odometry
Apr 04, 2023This paper addresses the robustness problem of visual-inertial state estimation for underwater operations. Underwater robots operating in a challenging environment are required to know their pose at all times. All vision-based localization schemes are prone to failure due to poor visibility conditions, color loss, and lack of features. The proposed approach utilizes a model of the robot's kinematics together with proprioceptive sensors to maintain the pose estimate during visual-inertial odometry (VIO) failures. Furthermore, the trajectories from successful VIO and the ones from the model-driven odometry are integrated in a coherent set that maintains a consistent pose at all times. Health-monitoring tracks the VIO process ensuring timely switches between the two estimators. Finally, loop closure is implemented on the overall trajectory. The resulting framework is a robust estimator switching between model-based and visual-inertial odometry (SM/VIO). Experimental results from numerous deployments of the Aqua2 vehicle demonstrate the robustness of our approach over coral reefs and a shipwreck.
High Definition, Inexpensive, Underwater Mapping
Mar 10, 2022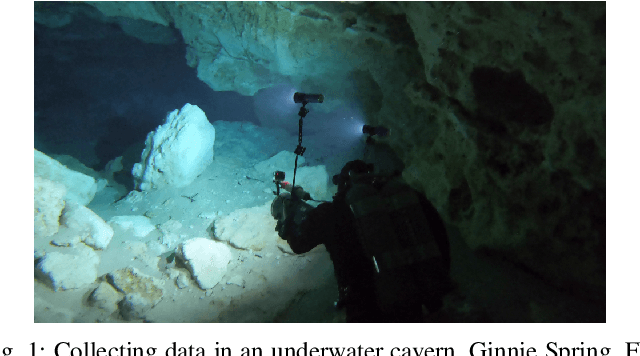

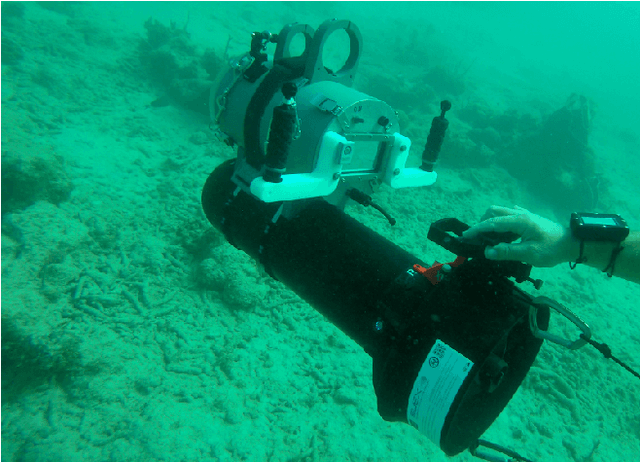
In this paper we present a complete framework for Underwater SLAM utilizing a single inexpensive sensor. Over the recent years, imaging technology of action cameras is producing stunning results even under the challenging conditions of the underwater domain. The GoPro 9 camera provides high definition video in synchronization with an Inertial Measurement Unit (IMU) data stream encoded in a single mp4 file. The visual inertial SLAM framework is augmented to adjust the map after each loop closure. Data collected at an artificial wreck of the coast of South Carolina and in caverns and caves in Florida demonstrate the robustness of the proposed approach in a variety of conditions.
DeepURL: Deep Pose Estimation Framework for Underwater Relative Localization
Mar 13, 2020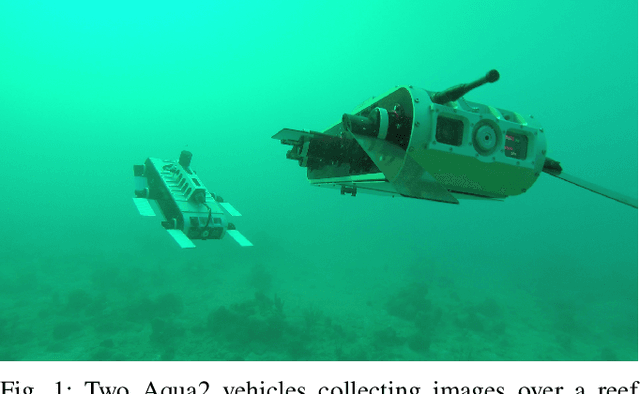
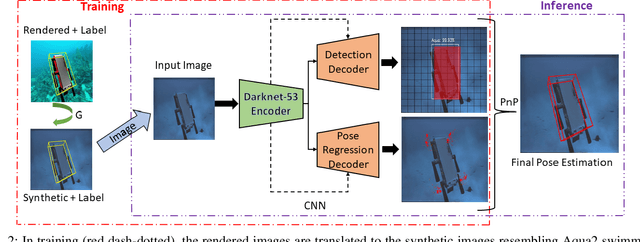
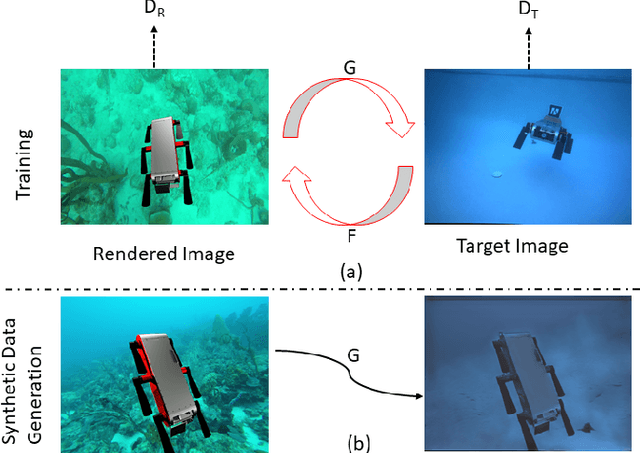
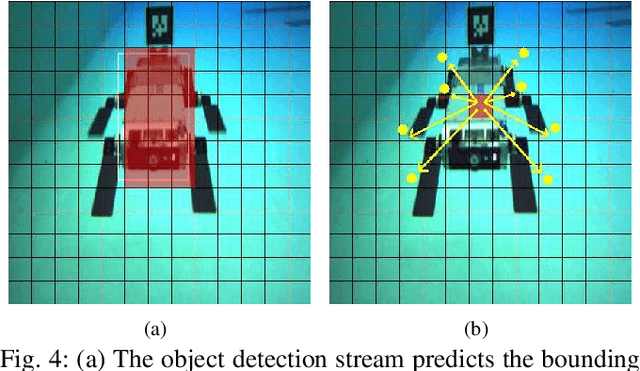
In this paper, we propose a real-time deep-learning approach for determining the 6D relative pose of Autonomous Underwater Vehicles (AUV) from a single image. A team of autonomous robots localizing themselves, in a communication-constrained underwater environment, is essential for many applications such as underwater exploration, mapping, multi-robot convoying, and other multi-robot tasks. Due to the profound difficulty of collecting ground truth images with accurate 6D poses underwater, this work utilizes rendered images from the Unreal Game Engine simulation for training. An image translation network is employed to bridge the gap between the rendered and the real images producing synthetic images for training. The proposed method predicts the 6D pose of an AUV from a single image as 2D image keypoints representing 8 corners of the 3D model of the AUV, and then the 6D pose in the camera coordinates is determined using RANSAC-based PnP. Experimental results in underwater environments (swimming pool and ocean) with different cameras demonstrate the robustness of the proposed technique, where the trained system decreased translation error by 75.5% and orientation error by 64.6% over the state-of-the-art methods.
Experimental Comparison of Open Source Visual-Inertial-Based State Estimation Algorithms in the Underwater Domain
Apr 03, 2019
A plethora of state estimation techniques have appeared in the last decade using visual data, and more recently with added inertial data. Datasets typically used for evaluation include indoor and urban environments, where supporting videos have shown impressive performance. However, such techniques have not been fully evaluated in challenging conditions, such as the marine domain. In this paper, we compare ten recent open-source packages to provide insights on their performance and guidelines on addressing current challenges. Specifically, we selected direct methods and tightly-coupled optimization techniques that fuse camera and Inertial Measurement Unit (IMU) data together. Experiments are conducted by testing all packages on datasets collected over the years with underwater robots in our laboratory. All the datasets are made available online.