Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh Definition, Inexpensive, Underwater Mapping
Paper and Code
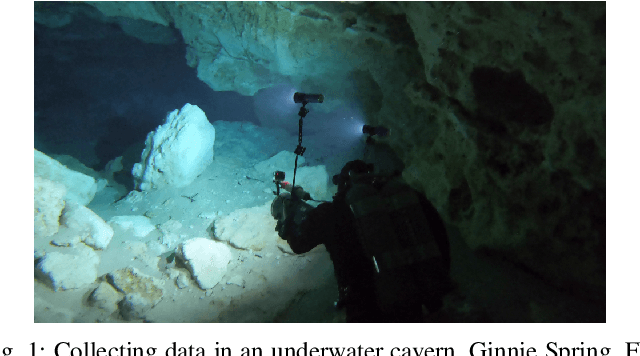
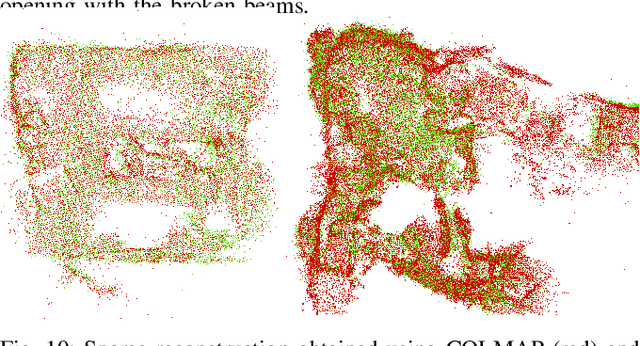

In this paper we present a complete framework for Underwater SLAM utilizing a single inexpensive sensor. Over the recent years, imaging technology of action cameras is producing stunning results even under the challenging conditions of the underwater domain. The GoPro 9 camera provides high definition video in synchronization with an Inertial Measurement Unit (IMU) data stream encoded in a single mp4 file. The visual inertial SLAM framework is augmented to adjust the map after each loop closure. Data collected at an artificial wreck of the coast of South Carolina and in caverns and caves in Florida demonstrate the robustness of the proposed approach in a variety of conditions.
* accepted to IEEE Internation Conference on Robotics and Automation,
2022
View paper on