 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVerification of Behavior Trees with Contingency Monitors
Nov 21, 2024

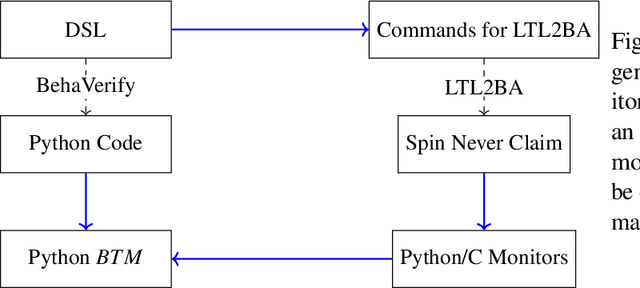

Behavior Trees (BTs) are high level controllers that have found use in a wide range of robotics tasks. As they grow in popularity and usage, it is crucial to ensure that the appropriate tools and methods are available for ensuring they work as intended. To that end, we created a new methodology by which to create Runtime Monitors for BTs. These monitors can be used by the BT to correct when undesirable behavior is detected and are capable of handling LTL specifications. We demonstrate that in terms of runtime, the generated monitors are on par with monitors generated by existing tools and highlight certain features that make our method more desirable in various situations. We note that our method allows for our monitors to be swapped out with alternate monitors with fairly minimal user effort. Finally, our method ties in with our existing tool, BehaVerify, allowing for the verification of BTs with monitors.
* In Proceedings FMAS2024, arXiv:2411.13215
A Visibility Roadmap Sampling Approach for a Multi-Robot Visibility-Based Pursuit-Evasion Problem
Feb 17, 2021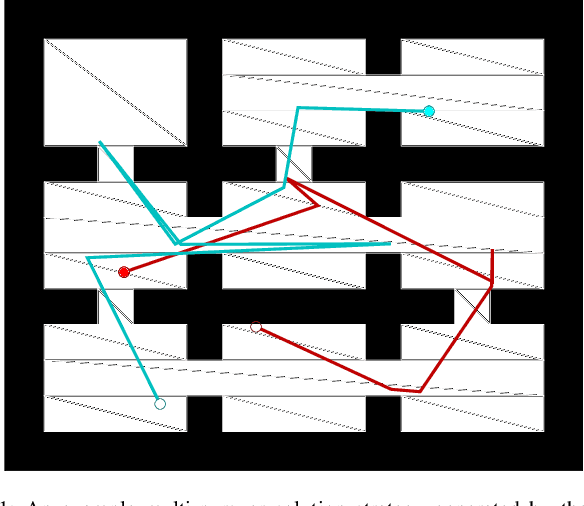
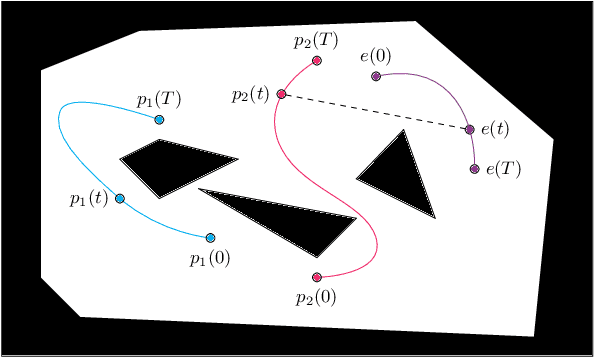
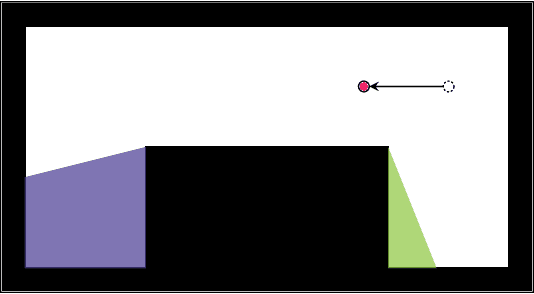
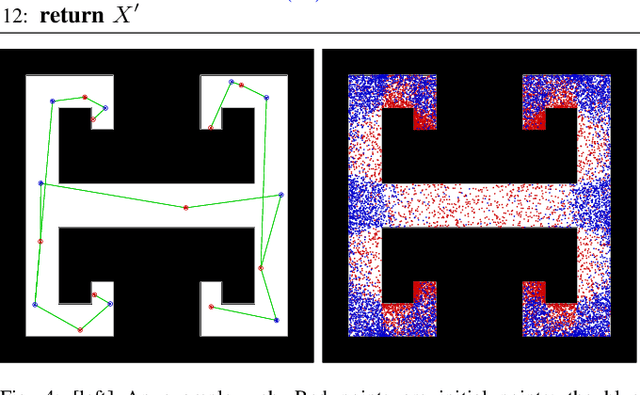
Given a two-dimensional polygonal space, the multi-robot visibility-based pursuit-evasion problem tasks several pursuer robots with the goal of establishing visibility with an arbitrarily fast evader. The best known complete algorithm for this problem takes time doubly exponential in the number of robots. However, sampling-based techniques have shown promise in generating feasible solutions in these scenarios. One of the primary drawbacks to employing existing sampling-based methods is that existing algorithms have long execution times and high failure rates for complex environments. This paper addresses that limitation by proposing a new algorithm that takes an environment as its input and returns a joint motion strategy which ensures that the evader is captured by one of the pursuers. Starting with a single pursuer, we sequentially construct Sample-Generated Pursuit-Evasion Graphs to create such a joint motion strategy. This sequential graph structure ensures that our algorithm will always terminate with a solution, regardless of the complexity of the environment. We describe an implementation of this algorithm and present quantitative results that show significant improvement in comparison to the existing algorithm.