 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
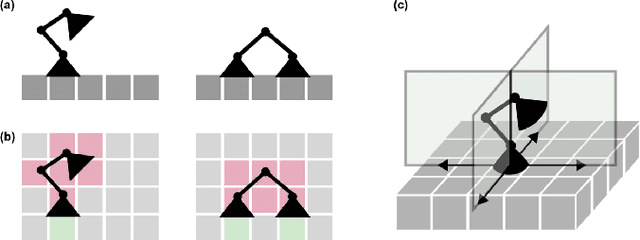
Add to EdgeReconfiguration Algorithms for Cubic Modular Robots with Realistic Movement Constraints
May 24, 2024
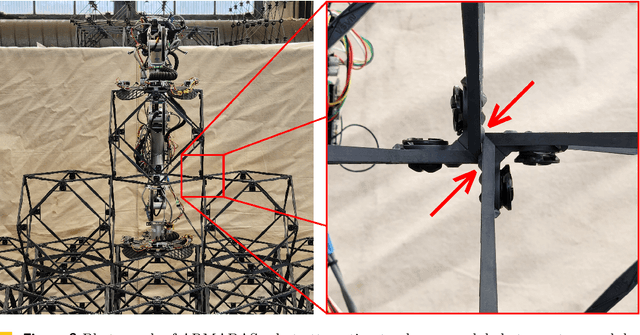


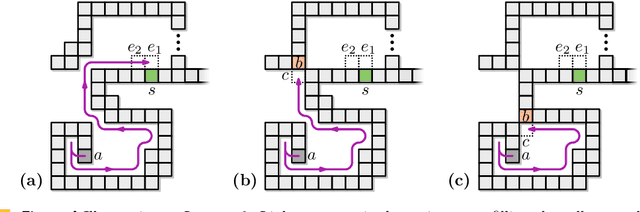
We introduce and analyze a model for self-reconfigurable robots made up of unit-cube modules. Compared to past models, our model aims to newly capture two important practical aspects of real-world robots. First, modules often do not occupy an exact unit cube, but rather have features like bumps extending outside the allotted space so that modules can interlock. Thus, for example, our model forbids modules from squeezing in between two other modules that are one unit distance apart. Second, our model captures the practical scenario of many passive modules assembled by a single robot, instead of requiring all modules to be able to move on their own. We prove two universality results. First, with a supply of auxiliary modules, we show that any connected polycube structure can be constructed by a carefully aligned plane sweep. Second, without additional modules, we show how to construct any structure for which a natural notion of external feature size is at least a constant; this property largely consolidates forbidden-pattern properties used in previous works on reconfigurable modular robots.
Optimal In-Place Compaction of Sliding Cubes
Dec 22, 2023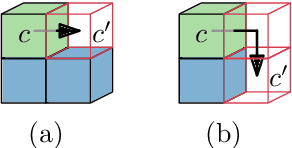


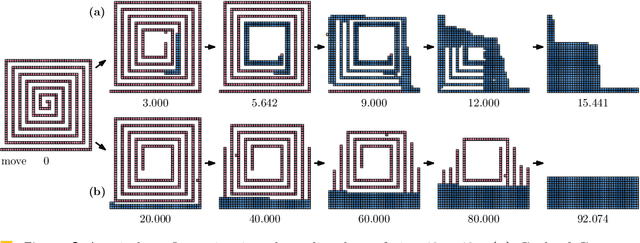
The sliding cubes model is a well-established theoretical framework that supports the analysis of reconfiguration algorithms for modular robots consisting of face-connected cubes. The best algorithm currently known for the reconfiguration problem, by Abel and Kominers [arXiv, 2011], uses O(n3) moves to transform any n-cube configuration into any other n-cube configuration. As is common in the literature, this algorithm reconfigures the input into an intermediate canonical shape. In this paper we present an in-place algorithm that reconfigures any n-cube configuration into a compact canonical shape using a number of moves proportional to the sum of coordinates of the input cubes. This result is asymptotically optimal. Furthermore, our algorithm directly extends to dimensions higher than three.
Unlabeled Multi-Robot Motion Planning with Tighter Separation Bounds
May 16, 2022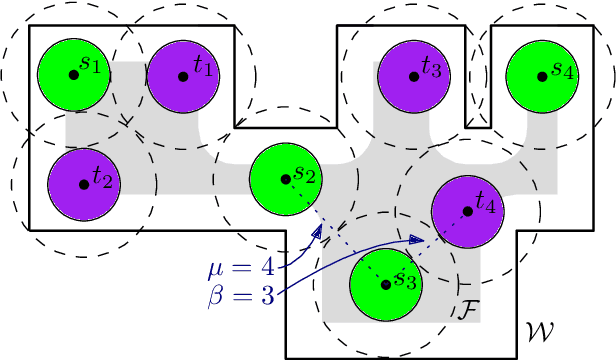
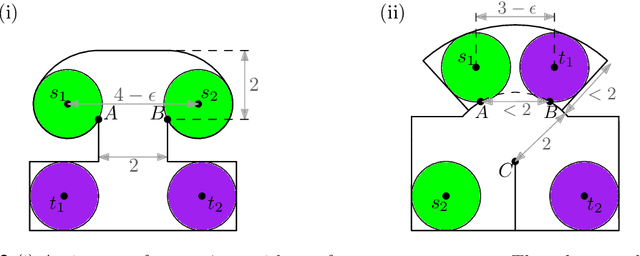
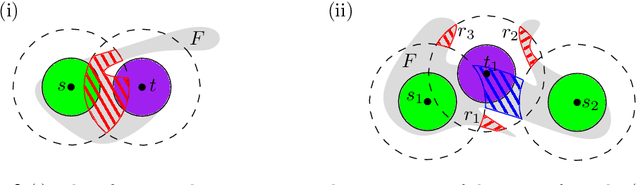
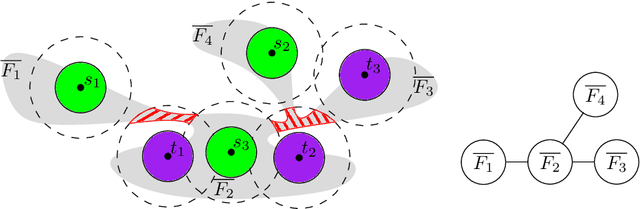
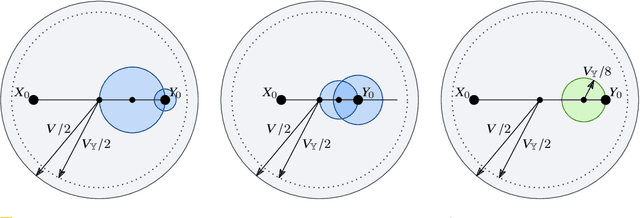
We consider the unlabeled motion-planning problem of $m$ unit-disc robots moving in a simple polygonal workspace of $n$ edges. The goal is to find a motion plan that moves the robots to a given set of $m$ target positions. For the unlabeled variant, it does not matter which robot reaches which target position as long as all target positions are occupied in the end. If the workspace has narrow passages such that the robots cannot fit through them, then the free configuration space, representing all possible unobstructed positions of the robots, will consist of multiple connected components. Even if in each component of the free space the number of targets matches the number of start positions, the motion-planning problem does not always have a solution when the robots and their targets are positioned very densely. In this paper, we prove tight bounds on how much separation between start and target positions is necessary to always guarantee a solution. Moreover, we describe an algorithm that always finds a solution in time $O(n \log n + mn + m^2)$ if the separation bounds are met. Specifically, we prove that the following separation is sufficient: any two start positions are at least distance $4$ apart, any two target positions are at least distance $4$ apart, and any pair of a start and a target positions is at least distance $3$ apart. We further show that when the free space consists of a single connected component, the separation between start and target positions is not necessary.
Separating Bounded and Unbounded Asynchrony for Autonomous Robots: Point Convergence with Limited Visibility
May 27, 2021
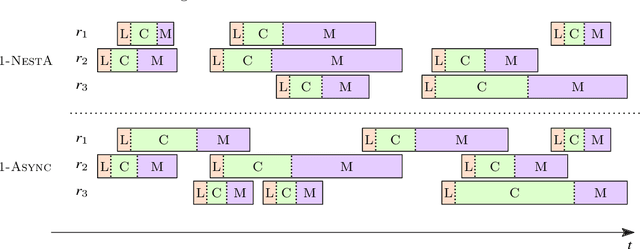
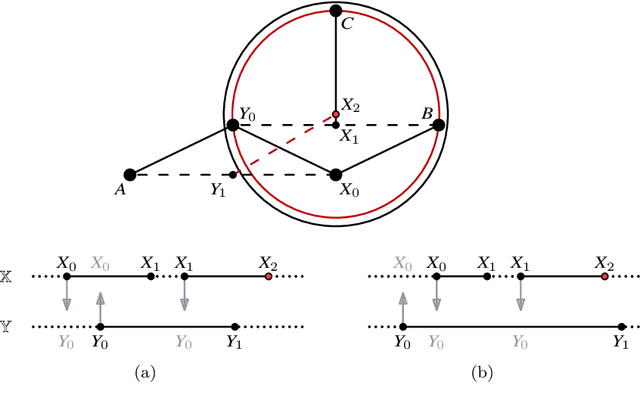
Among fundamental problems in the context of distributed computing by autonomous mobile entities, one of the most representative and well studied is {\sc Point Convergence}: given an arbitrary initial configuration of identical entities, disposed in the Euclidean plane, move in such a way that, for all $\eps>0$, a configuration in which the separation between all entities is at most $\eps$ is eventually reached and maintained. The problem has been previously studied in a variety of settings, including full visibility, exact measurements (like distances and angles), and synchronous activation of entities. Our study concerns the minimal assumptions under which entities, moving asynchronously with limited and unknown visibility range and subject to limited imprecision in measurements, can be guaranteed to converge in this way. We present an algorithm that solves {\sc Point Convergence}, for entities in the plane, in such a setting, provided the degree of asynchrony is bounded: while any one entity is active, any other entity can be activated at most $k$ times, for some arbitrarily large but fixed $k$. This provides a strong positive answer to a decade old open question posed by Katreniak. We also prove that in a comparable setting that permits unbounded asynchrony, {\sc Point Convergence} in the plane is impossible, contingent on the natural assumption that algorithms maintain the (visible) connectivity among entities present in the initial configuration. This variant, that we call {\sc Cohesive Convergence}, serves to distinguish the power of bounded and unbounded asynchrony in the control of autonomous mobile entities, settling at the same time a long-standing question whether in the Euclidean plane synchronously scheduled entities are more powerful than asynchronously scheduled entities.
Compacting Squares
May 17, 2021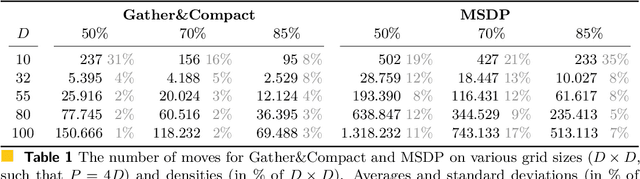
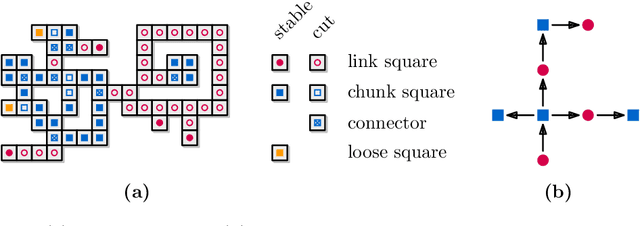
Edge-connected configurations of squares are a common model for modular robots in two dimensions. A well-established way to reconfigure such modular robots are so-called sliding moves. Dumitrescu and Pach [Graphs and Combinatorics, 2006] proved that it is always possible to reconfigure one edge-connected configuration of $n$ squares into any other using at most $O(n^2)$ sliding moves, while keeping the configuration connected at all times. For certain configurations $\Omega(n^2)$ sliding moves are necessary. However, significantly fewer moves may be sufficient. In this paper we present a novel input-sensitive in-place algorithm which requires only $O(\bar{P} n)$ sliding moves to transform one configuration into the other, where $\bar{P}$ is the maximum perimeter of the respective bounding boxes. Our Gather&Compact algorithm is built on the basic principle that well-connected components of modular robots can be transformed efficiently. Hence we iteratively increase the connectivity within a configuration, to finally arrive at a single solid $xy$-monotone component. We implemented Gather&Compact and compared it experimentally to the in-place modification by Moreno and Sacrist\'an [EuroCG 2020] of the Dumitrescu and Pach algorithm (MSDP). Our experiments show that Gather&Compact consistently outperforms MSDP by a significant margin, on all types of square configurations.
Turning machines
Sep 02, 2020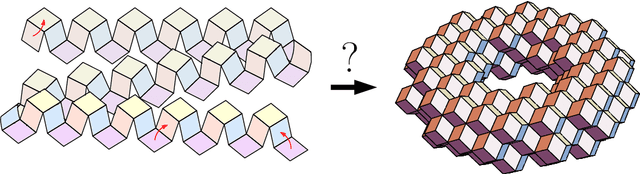
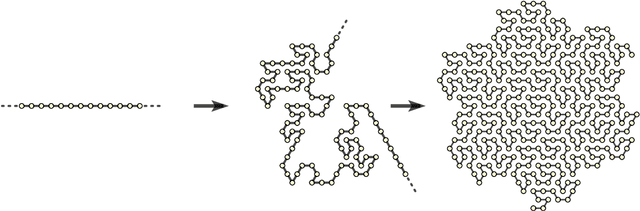
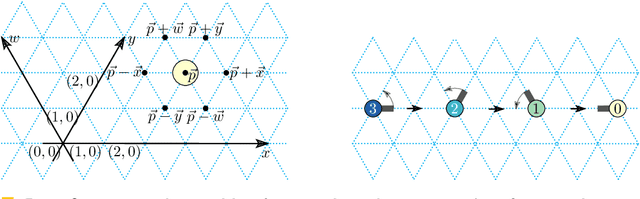
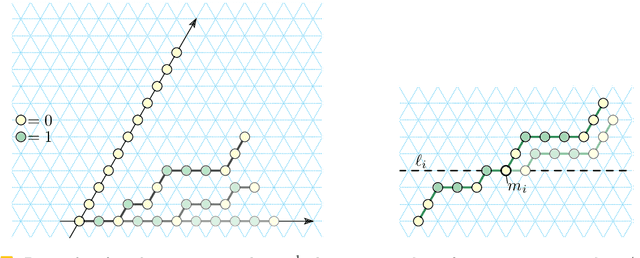
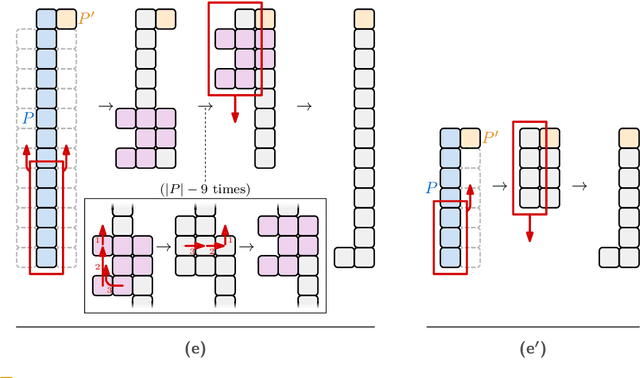
Molecular robotics is challenging, so it seems best to keep it simple. We consider an abstract molecular robotics model based on simple folding instructions that execute asynchronously. Turning Machines are a simple 1D to 2D folding model, also easily generalisable to 2D to 3D folding. A Turning Machine starts out as a line of connected monomers in the discrete plane, each with an associated turning number. A monomer turns relative to its neighbours, executing a unit-distance translation that drags other monomers along with it, and through collective motion the initial set of monomers eventually folds into a programmed shape. We fully characterise the ability of Turning Machines to execute line rotations, and to do so efficiently: computing an almost-full line rotation of $5\pi/3$ radians is possible, yet a full $2\pi$ rotation is impossible. We show that such line-rotations represent a fundamental primitive in the model, by using them to efficiently and asynchronously fold arbitrarily large zig-zag-rastered squares and $y$-monotone shapes.
Algorithmic Approaches to Reconfigurable Assembly Systems
Aug 27, 2020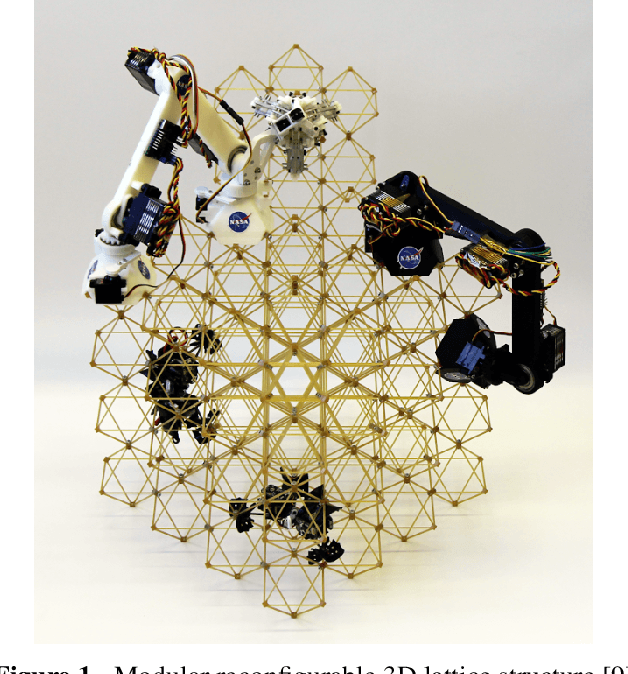
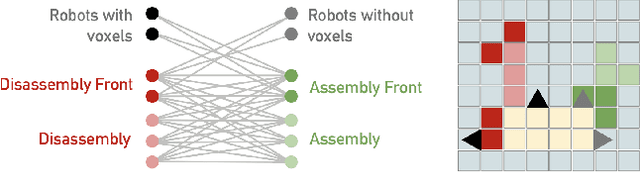
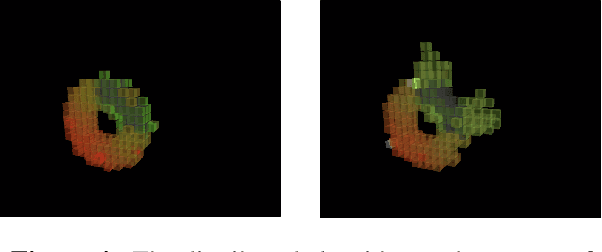
Assembly of large scale structural systems in space is understood as critical to serving applications that cannot be deployed from a single launch. Recent literature proposes the use of discrete modular structures for in-space assembly and relatively small scale robotics that are able to modify and traverse the structure. This paper addresses the algorithmic problems in scaling reconfigurable space structures built through robotic construction, where reconfiguration is defined as the problem of transforming an initial structure into a different goal configuration. We analyze different algorithmic paradigms and present corresponding abstractions and graph formulations, examining specialized algorithms that consider discretized space and time steps. We then discuss fundamental design trades for different computational architectures, such as centralized versus distributed, and present two representative algorithms as concrete examples for comparison. We analyze how those algorithms achieve different objective functions and goals, such as minimization of total distance traveled, maximization of fault-tolerance, or minimization of total time spent in assembly. This is meant to offer an impression of algorithmic constraints on scalability of corresponding structural and robotic design. From this study, a set of recommendations is developed on where and when to use each paradigm, as well as implications for physical robotic and structural system design.