 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaking Physical Objects with Generative AI and Robotic Assembly: Considering Fabrication Constraints, Sustainability, Time, Functionality, and Accessibility
Apr 27, 2025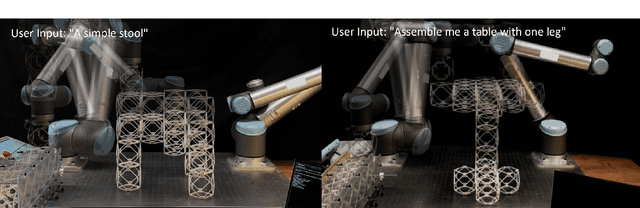
3D generative AI enables rapid and accessible creation of 3D models from text or image inputs. However, translating these outputs into physical objects remains a challenge due to the constraints in the physical world. Recent studies have focused on improving the capabilities of 3D generative AI to produce fabricable outputs, with 3D printing as the main fabrication method. However, this workshop paper calls for a broader perspective by considering how fabrication methods align with the capabilities of 3D generative AI. As a case study, we present a novel system using discrete robotic assembly and 3D generative AI to make physical objects. Through this work, we identified five key aspects to consider in a physical making process based on the capabilities of 3D generative AI. 1) Fabrication Constraints: Current text-to-3D models can generate a wide range of 3D designs, requiring fabrication methods that can adapt to the variability of generative AI outputs. 2) Time: While generative AI can generate 3D models in seconds, fabricating physical objects can take hours or even days. Faster production could enable a closer iterative design loop between humans and AI in the making process. 3) Sustainability: Although text-to-3D models can generate thousands of models in the digital world, extending this capability to the real world would be resource-intensive, unsustainable and irresponsible. 4) Functionality: Unlike digital outputs from 3D generative AI models, the fabrication method plays a crucial role in the usability of physical objects. 5) Accessibility: While generative AI simplifies 3D model creation, the need for fabrication equipment can limit participation, making AI-assisted creation less inclusive. These five key aspects provide a framework for assessing how well a physical making process aligns with the capabilities of 3D generative AI and values in the world.
Speech to Reality: On-Demand Production using Natural Language, 3D Generative AI, and Discrete Robotic Assembly
Sep 27, 2024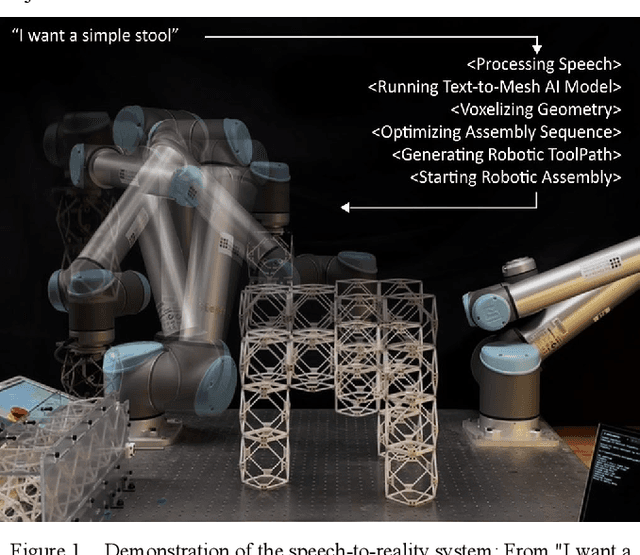
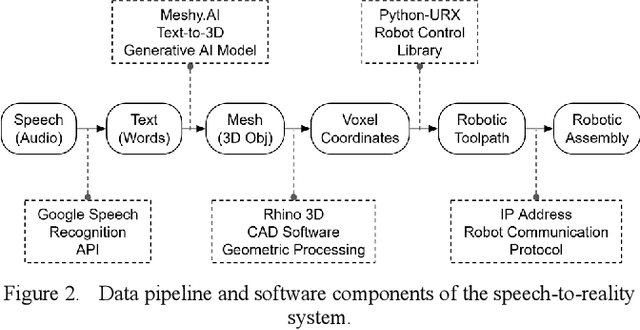
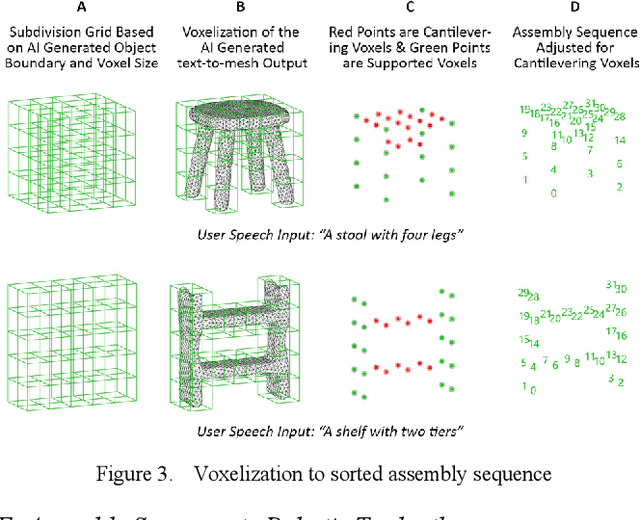
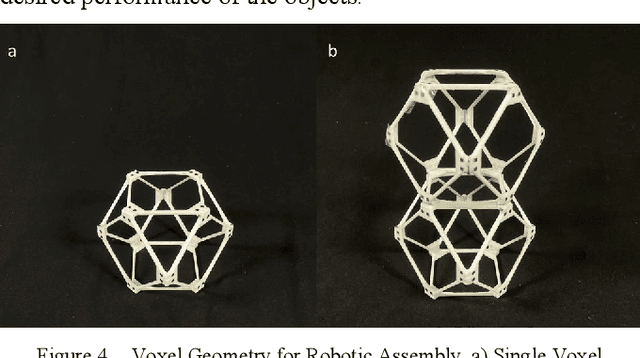
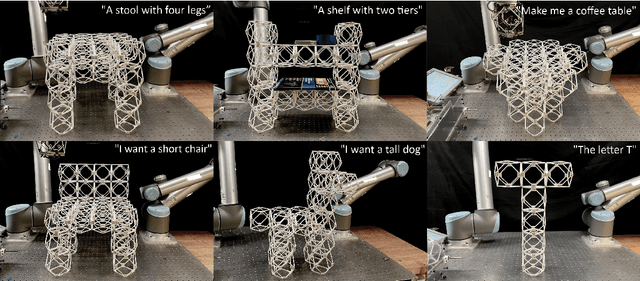
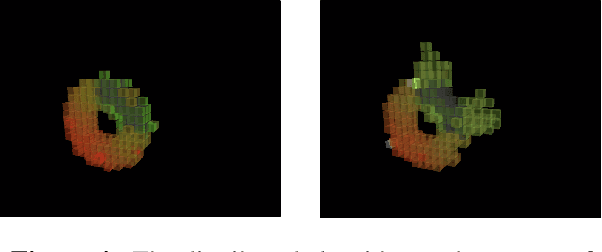
We present a system that transforms speech into physical objects by combining 3D generative Artificial Intelligence with robotic assembly. The system leverages natural language input to make design and manufacturing more accessible, enabling individuals without expertise in 3D modeling or robotic programming to create physical objects. We propose utilizing discrete robotic assembly of lattice-based voxel components to address the challenges of using generative AI outputs in physical production, such as design variability, fabrication speed, structural integrity, and material waste. The system interprets speech to generate 3D objects, discretizes them into voxel components, computes an optimized assembly sequence, and generates a robotic toolpath. The results are demonstrated through the assembly of various objects, ranging from chairs to shelves, which are prompted via speech and realized within 5 minutes using a 6-axis robotic arm.
Algorithmic Approaches to Reconfigurable Assembly Systems
Aug 27, 2020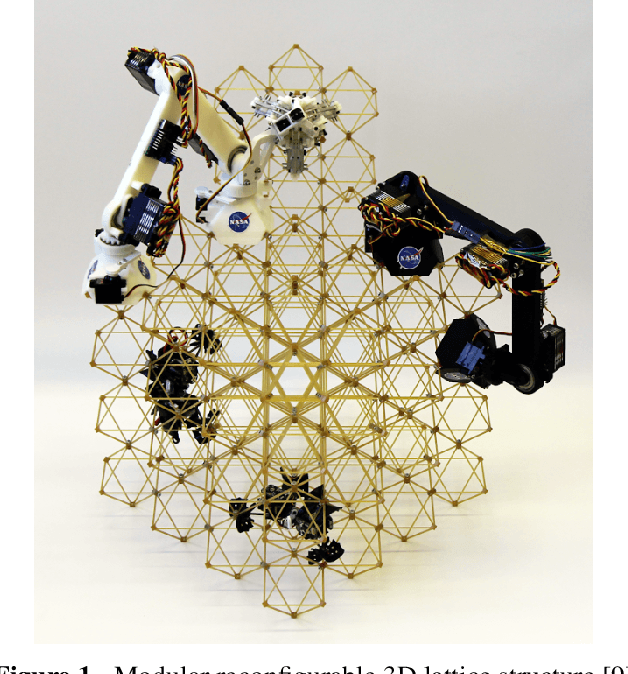
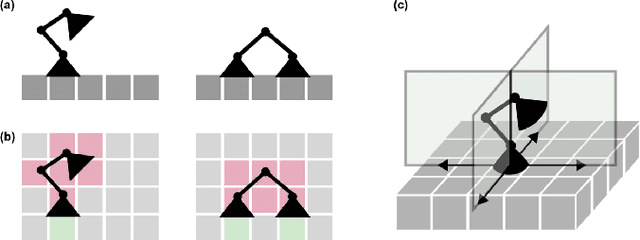
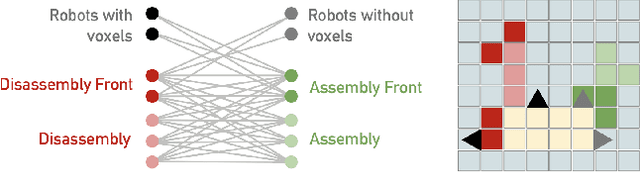
Assembly of large scale structural systems in space is understood as critical to serving applications that cannot be deployed from a single launch. Recent literature proposes the use of discrete modular structures for in-space assembly and relatively small scale robotics that are able to modify and traverse the structure. This paper addresses the algorithmic problems in scaling reconfigurable space structures built through robotic construction, where reconfiguration is defined as the problem of transforming an initial structure into a different goal configuration. We analyze different algorithmic paradigms and present corresponding abstractions and graph formulations, examining specialized algorithms that consider discretized space and time steps. We then discuss fundamental design trades for different computational architectures, such as centralized versus distributed, and present two representative algorithms as concrete examples for comparison. We analyze how those algorithms achieve different objective functions and goals, such as minimization of total distance traveled, maximization of fault-tolerance, or minimization of total time spent in assembly. This is meant to offer an impression of algorithmic constraints on scalability of corresponding structural and robotic design. From this study, a set of recommendations is developed on where and when to use each paradigm, as well as implications for physical robotic and structural system design.