 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStyle2Fab: Functionality-Aware Segmentation for Fabricating Personalized 3D Models with Generative AI
Sep 12, 2023



With recent advances in Generative AI, it is becoming easier to automatically manipulate 3D models. However, current methods tend to apply edits to models globally, which risks compromising the intended functionality of the 3D model when fabricated in the physical world. For example, modifying functional segments in 3D models, such as the base of a vase, could break the original functionality of the model, thus causing the vase to fall over. We introduce a method for automatically segmenting 3D models into functional and aesthetic elements. This method allows users to selectively modify aesthetic segments of 3D models, without affecting the functional segments. To develop this method we first create a taxonomy of functionality in 3D models by qualitatively analyzing 1000 models sourced from a popular 3D printing repository, Thingiverse. With this taxonomy, we develop a semi-automatic classification method to decompose 3D models into functional and aesthetic elements. We propose a system called Style2Fab that allows users to selectively stylize 3D models without compromising their functionality. We evaluate the effectiveness of our classification method compared to human-annotated data, and demonstrate the utility of Style2Fab with a user study to show that functionality-aware segmentation helps preserve model functionality.
Algorithmic Approaches to Reconfigurable Assembly Systems
Aug 27, 2020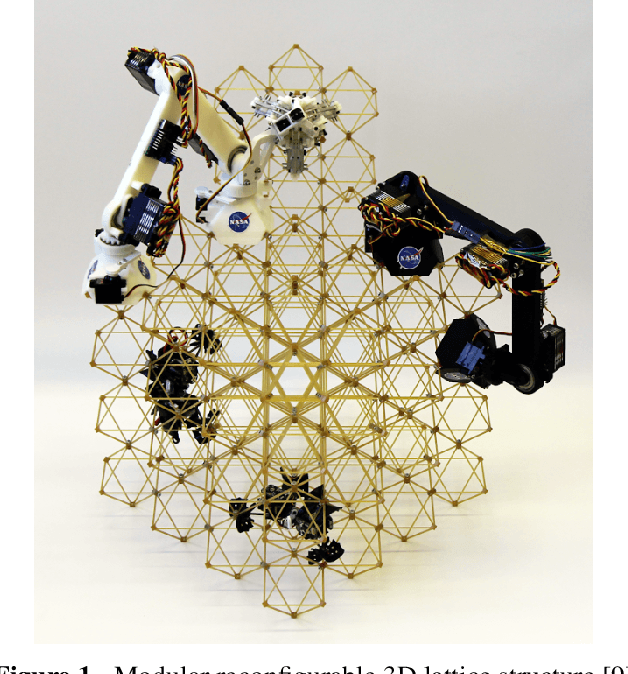
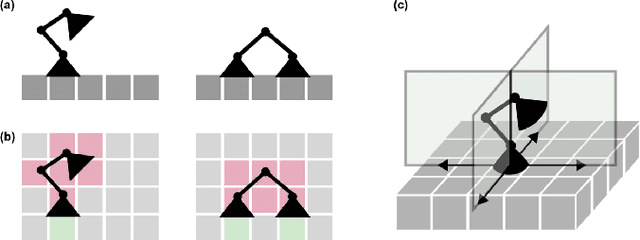
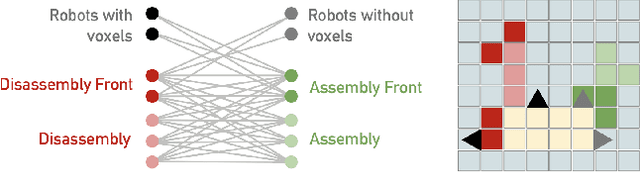
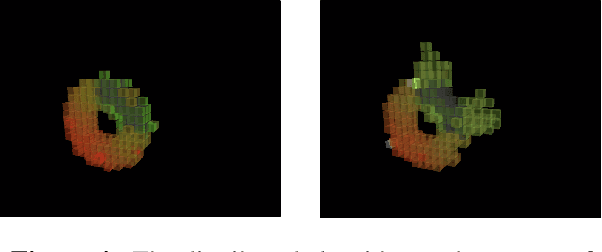
Assembly of large scale structural systems in space is understood as critical to serving applications that cannot be deployed from a single launch. Recent literature proposes the use of discrete modular structures for in-space assembly and relatively small scale robotics that are able to modify and traverse the structure. This paper addresses the algorithmic problems in scaling reconfigurable space structures built through robotic construction, where reconfiguration is defined as the problem of transforming an initial structure into a different goal configuration. We analyze different algorithmic paradigms and present corresponding abstractions and graph formulations, examining specialized algorithms that consider discretized space and time steps. We then discuss fundamental design trades for different computational architectures, such as centralized versus distributed, and present two representative algorithms as concrete examples for comparison. We analyze how those algorithms achieve different objective functions and goals, such as minimization of total distance traveled, maximization of fault-tolerance, or minimization of total time spent in assembly. This is meant to offer an impression of algorithmic constraints on scalability of corresponding structural and robotic design. From this study, a set of recommendations is developed on where and when to use each paradigm, as well as implications for physical robotic and structural system design.