 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeparating Bounded and Unbounded Asynchrony for Autonomous Robots: Point Convergence with Limited Visibility
May 27, 2021
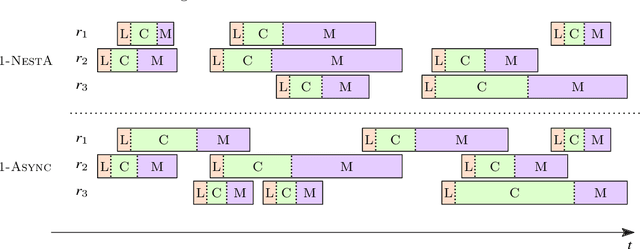
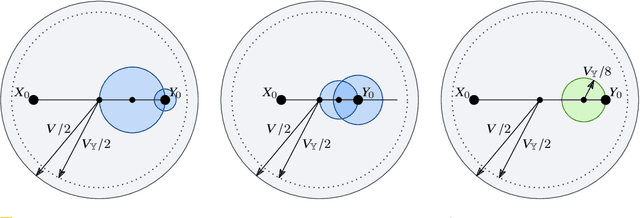
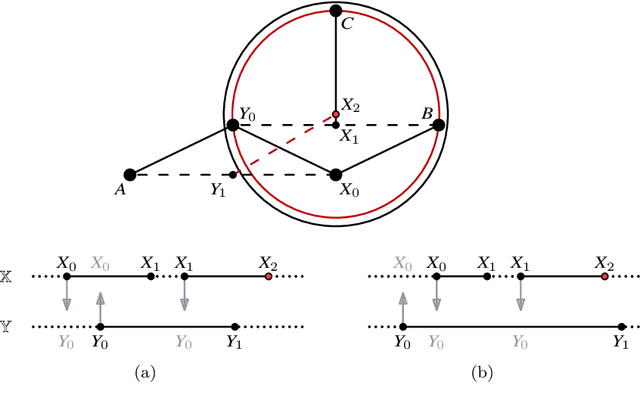
Among fundamental problems in the context of distributed computing by autonomous mobile entities, one of the most representative and well studied is {\sc Point Convergence}: given an arbitrary initial configuration of identical entities, disposed in the Euclidean plane, move in such a way that, for all $\eps>0$, a configuration in which the separation between all entities is at most $\eps$ is eventually reached and maintained. The problem has been previously studied in a variety of settings, including full visibility, exact measurements (like distances and angles), and synchronous activation of entities. Our study concerns the minimal assumptions under which entities, moving asynchronously with limited and unknown visibility range and subject to limited imprecision in measurements, can be guaranteed to converge in this way. We present an algorithm that solves {\sc Point Convergence}, for entities in the plane, in such a setting, provided the degree of asynchrony is bounded: while any one entity is active, any other entity can be activated at most $k$ times, for some arbitrarily large but fixed $k$. This provides a strong positive answer to a decade old open question posed by Katreniak. We also prove that in a comparable setting that permits unbounded asynchrony, {\sc Point Convergence} in the plane is impossible, contingent on the natural assumption that algorithms maintain the (visible) connectivity among entities present in the initial configuration. This variant, that we call {\sc Cohesive Convergence}, serves to distinguish the power of bounded and unbounded asynchrony in the control of autonomous mobile entities, settling at the same time a long-standing question whether in the Euclidean plane synchronously scheduled entities are more powerful than asynchronously scheduled entities.
Speeding up Routing Schedules on Aisle-Graphs with Single Access
Feb 10, 2021
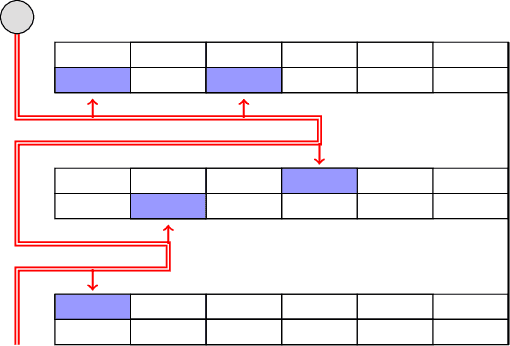

In this paper, we study the Orienteering Aisle-graphs Single-access Problem (OASP), a variant of the orienteering problem for a robot moving in a so-called single-access aisle-graph, i.e., a graph consisting of a set of rows that can be accessed from one side only. Aisle-graphs model, among others, vineyards or warehouses. Each aisle-graph vertex is associated with a reward that a robot obtains when visits the vertex itself. As the robot's energy is limited, only a subset of vertices can be visited with a fully charged battery. The objective is to maximize the total reward collected by the robot with a battery charge. We first propose an optimal algorithm that solves OASP in O(m^2 n^2) time for aisle-graphs with a single access consisting of m rows, each with n vertices. With the goal of designing faster solutions, we propose four greedy sub-optimal algorithms that run in at most O(mn (m+n)) time. For two of them, we guarantee an approximation ratio of 1/2(1-1/e), where e is the base of the natural logarithm, on the total reward by exploiting the well-known submodularity property. Experimentally, we show that these algorithms collect more than 80% of the optimal reward.
Optimal Routing Schedules for Robots Operating in Aisle-Structures
Sep 15, 2019
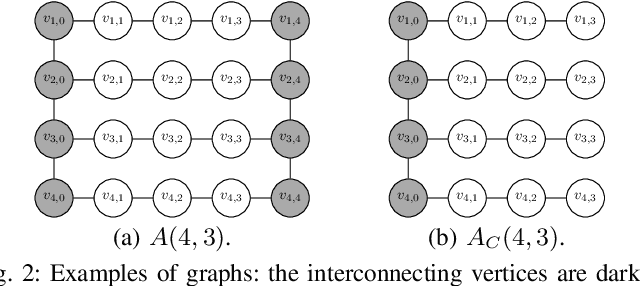


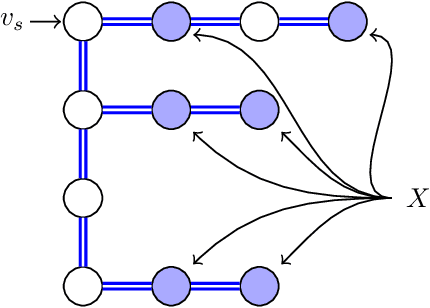
In this paper, we consider the Constant-cost Orienteering Problem (COP) where a robot, constrained by a limited travel budget, aims at selecting a path with the largest reward in an aisle-graph. The aisle-graph consists of a set of loosely connected rows where the robot can change lane only at either end, but not in the middle. Even when considering this special type of graphs, the orienteering problem is known to be NP-hard. We optimally solve in polynomial time two special cases, COP-FR where the robot can only traverse full rows, and COP-SC where the robot can access the rows only from one side. To solve the general COP, we then apply our special case algorithms as well as a new heuristic that suitably combines them. Despite its light computational complexity and being confined into a very limited class of paths, the optimal solutions for COP-FR turn out to be competitive even for COP in both real and synthetic scenarios. Furthermore, our new heuristic for the general case outperforms state-of-art algorithms, especially for input with highly unbalanced rewards.