 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeparating Bounded and Unbounded Asynchrony for Autonomous Robots: Point Convergence with Limited Visibility
May 27, 2021
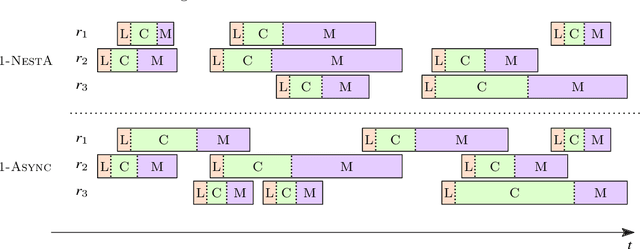
Among fundamental problems in the context of distributed computing by autonomous mobile entities, one of the most representative and well studied is {\sc Point Convergence}: given an arbitrary initial configuration of identical entities, disposed in the Euclidean plane, move in such a way that, for all $\eps>0$, a configuration in which the separation between all entities is at most $\eps$ is eventually reached and maintained. The problem has been previously studied in a variety of settings, including full visibility, exact measurements (like distances and angles), and synchronous activation of entities. Our study concerns the minimal assumptions under which entities, moving asynchronously with limited and unknown visibility range and subject to limited imprecision in measurements, can be guaranteed to converge in this way. We present an algorithm that solves {\sc Point Convergence}, for entities in the plane, in such a setting, provided the degree of asynchrony is bounded: while any one entity is active, any other entity can be activated at most $k$ times, for some arbitrarily large but fixed $k$. This provides a strong positive answer to a decade old open question posed by Katreniak. We also prove that in a comparable setting that permits unbounded asynchrony, {\sc Point Convergence} in the plane is impossible, contingent on the natural assumption that algorithms maintain the (visible) connectivity among entities present in the initial configuration. This variant, that we call {\sc Cohesive Convergence}, serves to distinguish the power of bounded and unbounded asynchrony in the control of autonomous mobile entities, settling at the same time a long-standing question whether in the Euclidean plane synchronously scheduled entities are more powerful than asynchronously scheduled entities.
Getting Close Without Touching: Near-Gathering for Autonomous Mobile Robots
May 27, 2015



In this paper we study the Near-Gathering problem for a finite set of dimensionless, deterministic, asynchronous, anonymous, oblivious and autonomous mobile robots with limited visibility moving in the Euclidean plane in Look-Compute-Move (LCM) cycles. In this problem, the robots have to get close enough to each other, so that every robot can see all the others, without touching (i.e., colliding with) any other robot. The importance of solving the Near-Gathering problem is that it makes it possible to overcome the restriction of having robots with limited visibility. Hence it allows to exploit all the studies (the majority, actually) done on this topic in the unlimited visibility setting. Indeed, after the robots get close enough to each other, they are able to see all the robots in the system, a scenario that is similar to the one where the robots have unlimited visibility. We present the first (deterministic) algorithm for the Near-Gathering problem, to the best of our knowledge, which allows a set of autonomous mobile robots to nearly gather within finite time without ever colliding. Our algorithm assumes some reasonable conditions on the input configuration (the Near-Gathering problem is easily seen to be unsolvable in general). Further, all the robots are assumed to have a compass (hence they agree on the "North" direction), but they do not necessarily have the same handedness (hence they may disagree on the clockwise direction). We also show how the robots can detect termination, i.e., detect when the Near-Gathering problem has been solved. This is crucial when the robots have to perform a generic task after having nearly gathered. We show that termination detection can be obtained even if the total number of robots is unknown to the robots themselves (i.e., it is not a parameter of the algorithm), and robots have no way to explicitly communicate.