 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReconfiguration Algorithms for Cubic Modular Robots with Realistic Movement Constraints
May 24, 2024
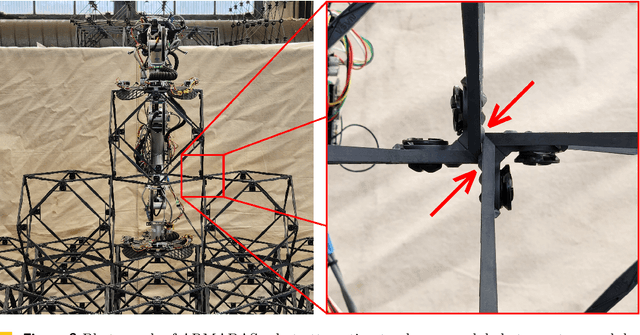


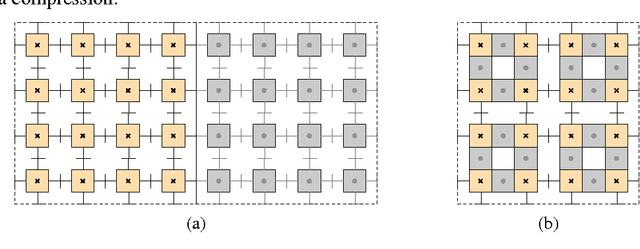
We introduce and analyze a model for self-reconfigurable robots made up of unit-cube modules. Compared to past models, our model aims to newly capture two important practical aspects of real-world robots. First, modules often do not occupy an exact unit cube, but rather have features like bumps extending outside the allotted space so that modules can interlock. Thus, for example, our model forbids modules from squeezing in between two other modules that are one unit distance apart. Second, our model captures the practical scenario of many passive modules assembled by a single robot, instead of requiring all modules to be able to move on their own. We prove two universality results. First, with a supply of auxiliary modules, we show that any connected polycube structure can be constructed by a carefully aligned plane sweep. Second, without additional modules, we show how to construct any structure for which a natural notion of external feature size is at least a constant; this property largely consolidates forbidden-pattern properties used in previous works on reconfigurable modular robots.
Characterizing Universal Reconfigurability of Modular Pivoting Robots
Dec 14, 2020

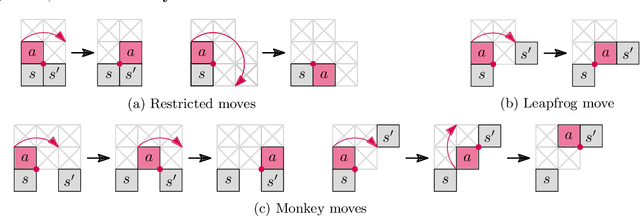

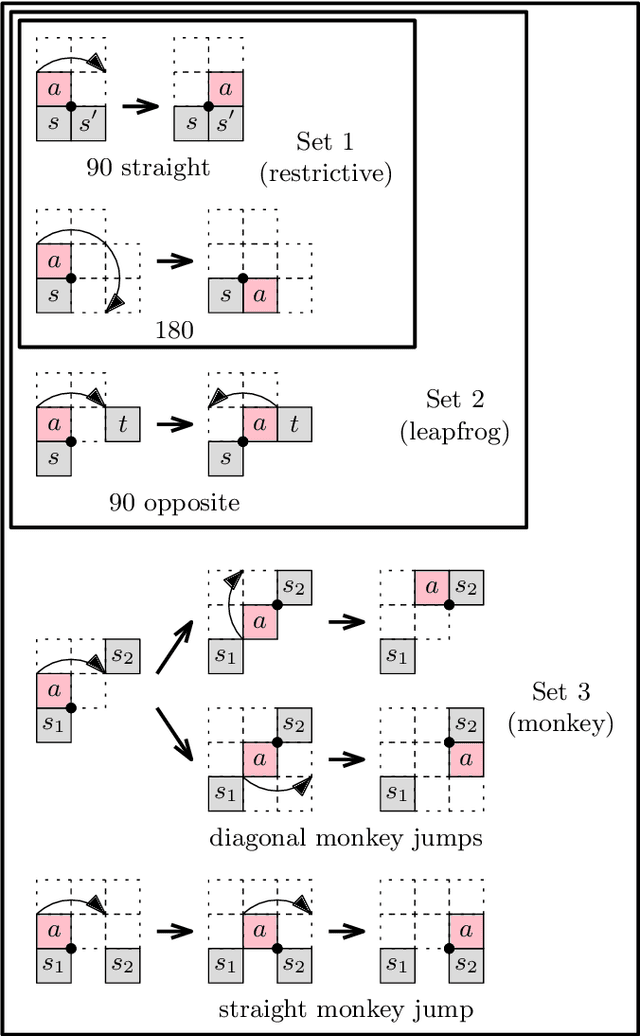
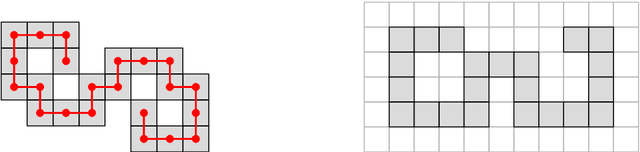
We give both efficient algorithms and hardness results for reconfiguring between two connected configurations of modules in the hexagonal grid. The reconfiguration moves that we consider are "pivots", where a hexagonal module rotates around a vertex shared with another module. Following prior work on modular robots, we define two natural sets of hexagon pivoting moves of increasing power: restricted and monkey moves. When we allow both moves, we present the first universal reconfiguration algorithm, which transforms between any two connected configurations using $O(n^3)$ monkey moves. This result strongly contrasts the analogous problem for squares, where there are rigid examples that do not have a single pivoting move preserving connectivity. On the other hand, if we only allow restricted moves, we prove that the reconfiguration problem becomes PSPACE-complete. Moreover, we show that, in contrast to hexagons, the reconfiguration problem for pivoting squares is PSPACE-complete regardless of the set of pivoting moves allowed. In the process, we strengthen the reduction framework of Demaine et al. [FUN'18] that we consider of independent interest.
Walking through Doors is Hard, even without Staircases: Proving PSPACE-hardness via Planar Assemblies of Door Gadgets
Jun 01, 2020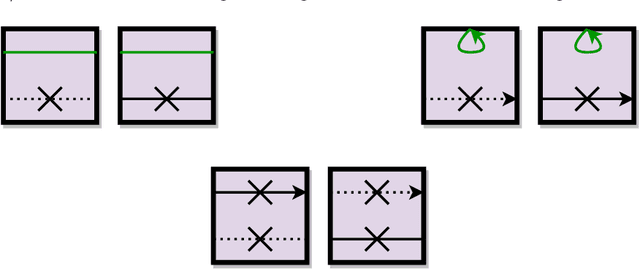
A door gadget has two states and three tunnels that can be traversed by an agent (player, robot, etc.): the "open" and "close" tunnel sets the gadget's state to open and closed, respectively, while the "traverse" tunnel can be traversed if and only if the door is in the open state. We prove that it is PSPACE-complete to decide whether an agent can move from one location to another through a planar assembly of such door gadgets, removing the traditional need for crossover gadgets and thereby simplifying past PSPACE-hardness proofs of Lemmings and Nintendo games Super Mario Bros., Legend of Zelda, and Donkey Kong Country. Our result holds in all but one of the possible local planar embedding of the open, close, and traverse tunnels within a door gadget; in the one remaining case, we prove NP-hardness. We also introduce and analyze a simpler type of door gadget, called the self-closing door. This gadget has two states and only two tunnels, similar to the "open" and "traverse" tunnels of doors, except that traversing the traverse tunnel also closes the door. In a variant called the symmetric self-closing door, the "open" tunnel can be traversed if and only if the door is closed. We prove that it is PSPACE-complete to decide whether an agent can move from one location to another through a planar assembly of either type of self-closing door. Then we apply this framework to prove new PSPACE-hardness results for eight different 3D Mario games and Sokobond.
Universal Reconfiguration of Facet-Connected Modular Robots by Pivots: The $O(1)$ Musketeers
Sep 10, 2019
We present the first universal reconfiguration algorithm for transforming a modular robot between any two facet-connected square-grid configurations using pivot moves. More precisely, we show that five extra "helper" modules ("musketeers") suffice to reconfigure the remaining $n$ modules between any two given configurations. Our algorithm uses $O(n^2)$ pivot moves, which is worst-case optimal. Previous reconfiguration algorithms either require less restrictive "sliding" moves, do not preserve facet-connectivity, or for the setting we consider, could only handle a small subset of configurations defined by a local forbidden pattern. Configurations with the forbidden pattern do have disconnected reconfiguration graphs (discrete configuration spaces), and indeed we show that they can have an exponential number of connected components. But forbidding the local pattern throughout the configuration is far from necessary, as we show that just a constant number of added modules (placed to be freely reconfigurable) suffice for universal reconfigurability. We also classify three different models of natural pivot moves that preserve facet-connectivity, and show separations between these models.
Computational Complexity of Motion Planning of a Robot through Simple Gadgets
Jun 09, 2018
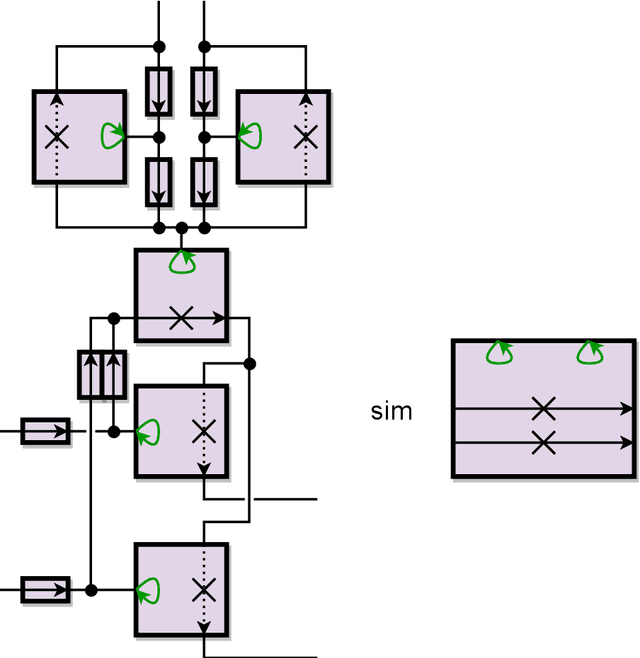
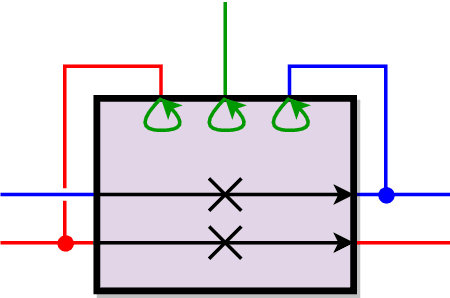
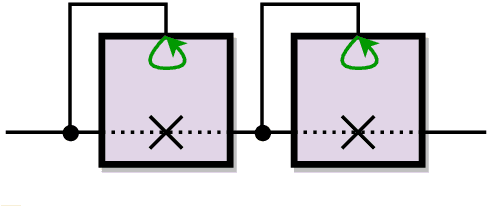
We initiate a general theory for analyzing the complexity of motion planning of a single robot through a graph of "gadgets", each with their own state, set of locations, and allowed traversals between locations that can depend on and change the state. This type of setup is common to many robot motion planning hardness proofs. We characterize the complexity for a natural simple case: each gadget connects up to four locations in a perfect matching (but each direction can be traversable or not in the current state), has one or two states, every gadget traversal is immediately undoable, and that gadget locations are connected by an always-traversable forest, possibly restricted to avoid crossings in the plane. Specifically, we show that any single nontrivial four-location two-state gadget type is enough for motion planning to become PSPACE-complete, while any set of simpler gadgets (effectively two-location or one-state) has a polynomial-time motion planning algorithm. As a sample application, our results show that motion planning games with "spinners" are PSPACE-complete, establishing a new hard aspect of Zelda: Oracle of Seasons.
Coordinated Motion Planning: Reconfiguring a Swarm of Labeled Robots with Bounded Stretch
Jan 05, 2018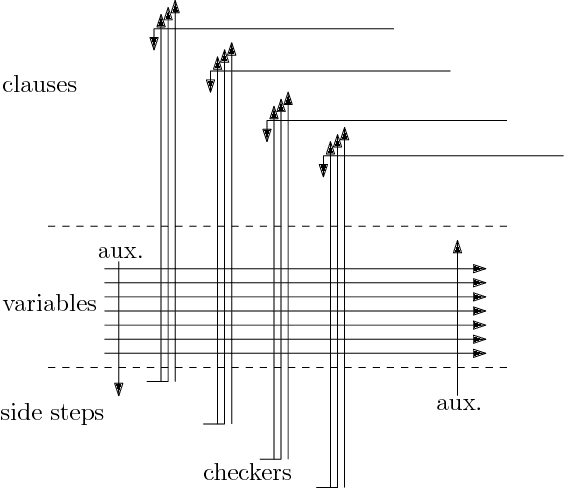
We present a number of breakthroughs for coordinated motion planning, in which the objective is to reconfigure a swarm of labeled convex objects by a combination of parallel, continuous, collision-free translations into a given target arrangement. Problems of this type can be traced back to the classic work of Schwartz and Sharir (1983), who gave a method for deciding the existence of a coordinated motion for a set of disks between obstacles; their approach is polynomial in the complexity of the obstacles, but exponential in the number of disks. Other previous work has largely focused on {\em sequential} schedules, in which one robot moves at a time. We provide constant-factor approximation algorithms for minimizing the execution time of a coordinated, {\em parallel} motion plan for a swarm of robots in the absence of obstacles, provided some amount of separability. Our algorithm achieves {\em constant stretch factor}: If all robots are at most $d$ units from their respective starting positions, the total duration of the overall schedule is $O(d)$. Extensions include unlabeled robots and different classes of robots. We also prove that finding a plan with minimal execution time is NP-hard, even for a grid arrangement without any stationary obstacles. On the other hand, we show that for densely packed disks that cannot be well separated, a stretch factor $\Omega(N^{1/4})$ may be required. On the positive side, we establish a stretch factor of $O(N^{1/2})$ even in this case.
Particle Computation: Complexity, Algorithms, and Logic
Dec 04, 2017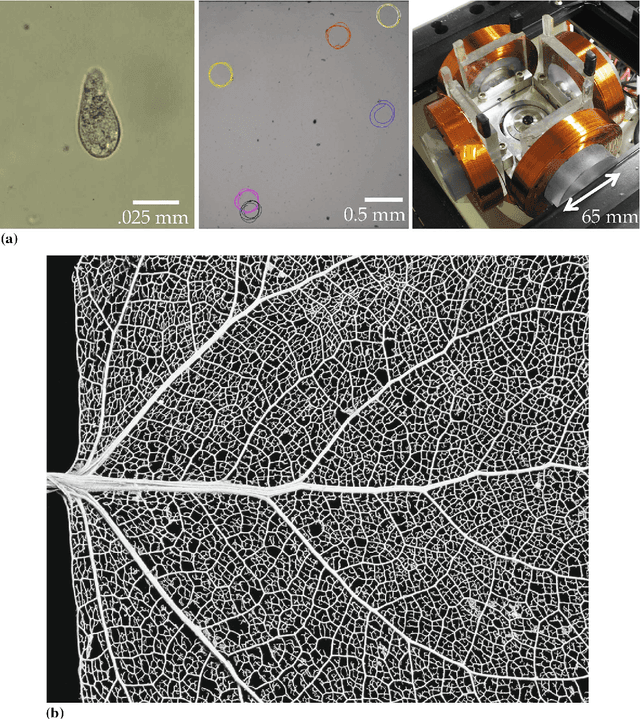
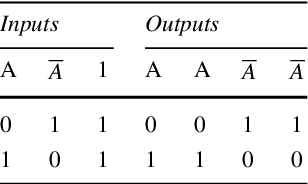
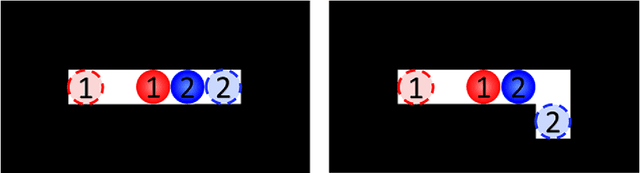

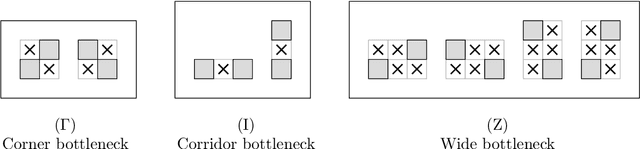
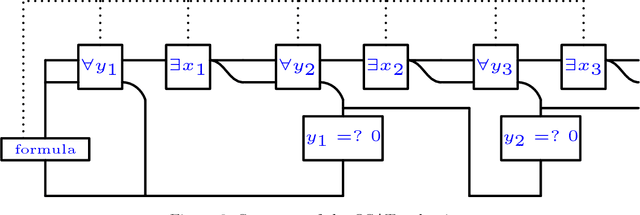
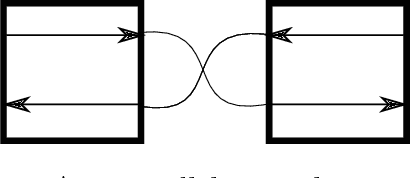
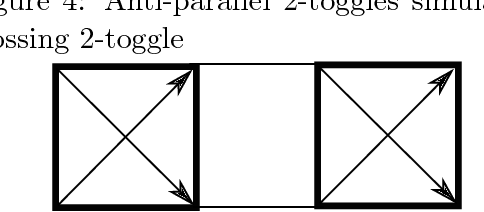
We investigate algorithmic control of a large swarm of mobile particles (such as robots, sensors, or building material) that move in a 2D workspace using a global input signal (such as gravity or a magnetic field). We show that a maze of obstacles to the environment can be used to create complex systems. We provide a wide range of results for a wide range of questions. These can be subdivided into external algorithmic problems, in which particle configurations serve as input for computations that are performed elsewhere, and internal logic problems, in which the particle configurations themselves are used for carrying out computations. For external algorithms, we give both negative and positive results. If we are given a set of stationary obstacles, we prove that it is NP-hard to decide whether a given initial configuration of unit-sized particles can be transformed into a desired target configuration. Moreover, we show that finding a control sequence of minimum length is PSPACE-complete. We also work on the inverse problem, providing constructive algorithms to design workspaces that efficiently implement arbitrary permutations between different configurations. For internal logic, we investigate how arbitrary computations can be implemented. We demonstrate how to encode dual-rail logic to build a universal logic gate that concurrently evaluates and, nand, nor, and or operations. Using many of these gates and appropriate interconnects, we can evaluate any logical expression. However, we establish that simulating the full range of complex interactions present in arbitrary digital circuits encounters a fundamental difficulty: a fan-out gate cannot be generated. We resolve this missing component with the help of 2x1 particles, which can create fan-out gates that produce multiple copies of the inputs. Using these gates we provide rules for replicating arbitrary digital circuits.
Universal Hinge Patterns for Folding Strips Efficiently into Any Grid Polyhedron
Nov 10, 2016



We present two universal hinge patterns that enable a strip of material to fold into any connected surface made up of unit squares on the 3D cube grid--for example, the surface of any polycube. The folding is efficient: for target surfaces topologically equivalent to a sphere, the strip needs to have only twice the target surface area, and the folding stacks at most two layers of material anywhere. These geometric results offer a new way to build programmable matter that is substantially more efficient than what is possible with a square $N \times N$ sheet of material, which can fold into all polycubes only of surface area $O(N)$ and may stack $\Theta(N^2)$ layers at one point. We also show how our strip foldings can be executed by a rigid motion without collisions, which is not possible in general with 2D sheet folding. To achieve these results, we develop new approximation algorithms for milling the surface of a grid polyhedron, which simultaneously give a 2-approximation in tour length and an 8/3-approximation in the number of turns. Both length and turns consume area when folding a strip, so we build on past approximation algorithms for these two objectives from 2D milling.
Particle Computation: Designing Worlds to Control Robot Swarms with only Global Signals
Feb 16, 2014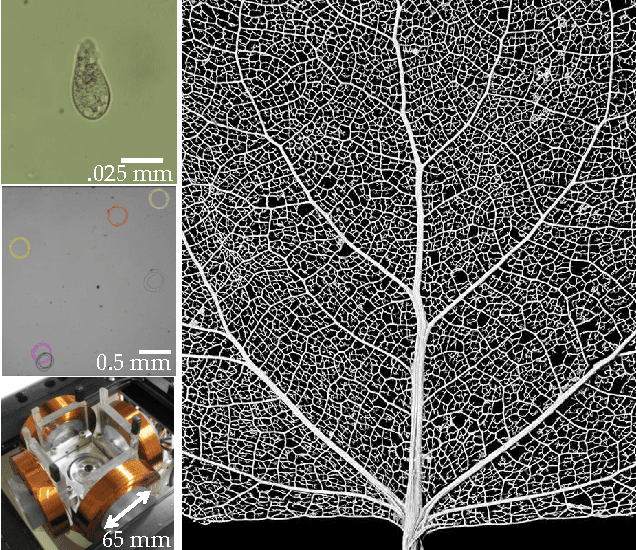
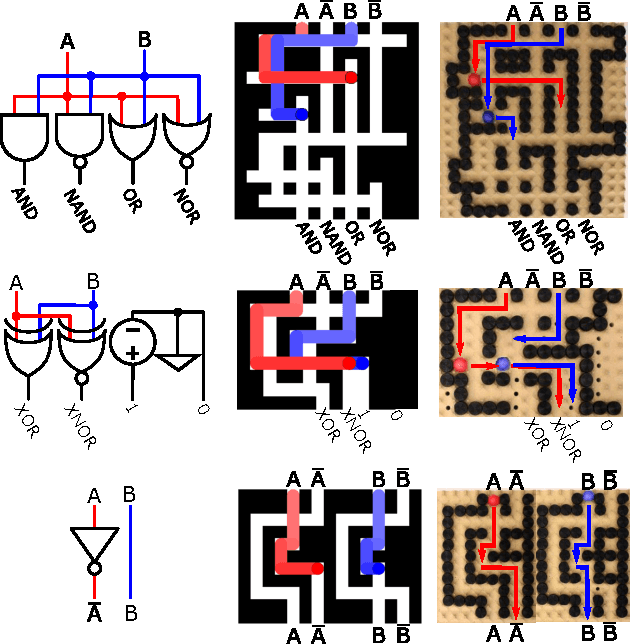
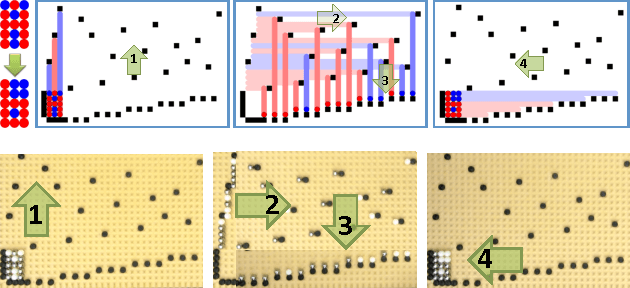
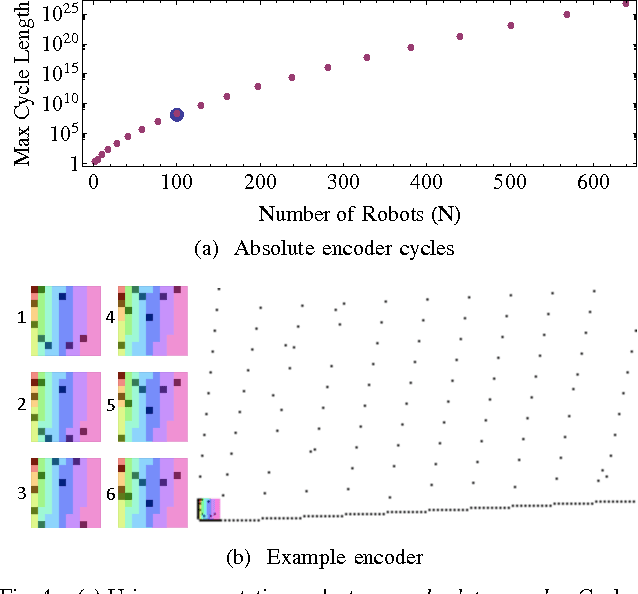
Micro- and nanorobots are often controlled by global input signals, such as an electromagnetic or gravitational field. These fields move each robot maximally until it hits a stationary obstacle or another stationary robot. This paper investigates 2D motion-planning complexity for large swarms of simple mobile robots (such as bacteria, sensors, or smart building material). In previous work we proved it is NP-hard to decide whether a given initial configuration can be transformed into a desired target configuration; in this paper we prove a stronger result: the problem of finding an optimal control sequence is PSPACE-complete. On the positive side, we show we can build useful systems by designing obstacles. We present a reconfigurable hardware platform and demonstrate how to form arbitrary permutations and build a compact absolute encoder. We then take the same platform and use dual-rail logic to build a universal logic gate that concurrently evaluates AND, NAND, NOR and OR operations. Using many of these gates and appropriate interconnects we can evaluate any logical expression.
Reconfiguration of 3D Crystalline Robots Using O(log n) Parallel Moves
Aug 17, 2009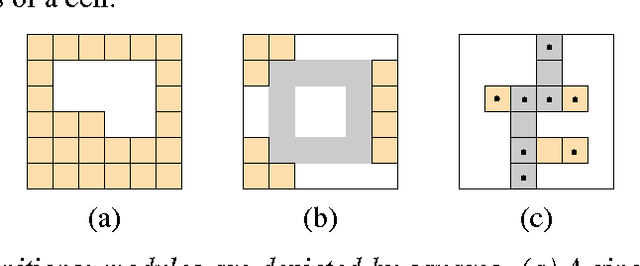
We consider the theoretical model of Crystalline robots, which have been introduced and prototyped by the robotics community. These robots consist of independently manipulable unit-square atoms that can extend/contract arms on each side and attach/detach from neighbors. These operations suffice to reconfigure between any two given (connected) shapes. The worst-case number of sequential moves required to transform one connected configuration to another is known to be Theta(n). However, in principle, atoms can all move simultaneously. We develop a parallel algorithm for reconfiguration that runs in only O(log n) parallel steps, although the total number of operations increases slightly to Theta(nlogn). The result is the first (theoretically) almost-instantaneous universally reconfigurable robot built from simple units.