 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal In-Place Compaction of Sliding Cubes
Dec 22, 2023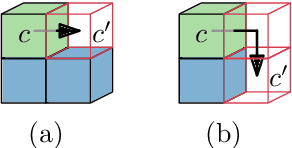

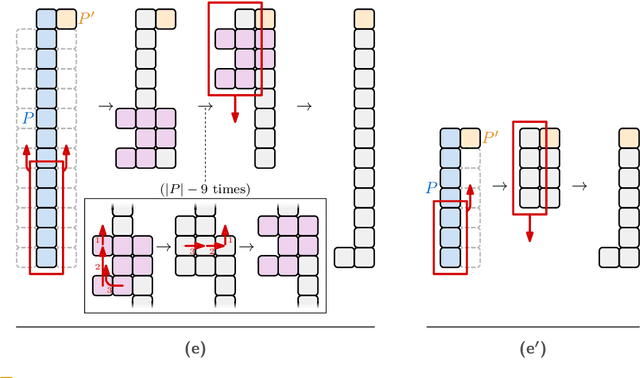

The sliding cubes model is a well-established theoretical framework that supports the analysis of reconfiguration algorithms for modular robots consisting of face-connected cubes. The best algorithm currently known for the reconfiguration problem, by Abel and Kominers [arXiv, 2011], uses O(n3) moves to transform any n-cube configuration into any other n-cube configuration. As is common in the literature, this algorithm reconfigures the input into an intermediate canonical shape. In this paper we present an in-place algorithm that reconfigures any n-cube configuration into a compact canonical shape using a number of moves proportional to the sum of coordinates of the input cubes. This result is asymptotically optimal. Furthermore, our algorithm directly extends to dimensions higher than three.
Automatic Tree Ring Detection using Jacobi Sets
Oct 17, 2020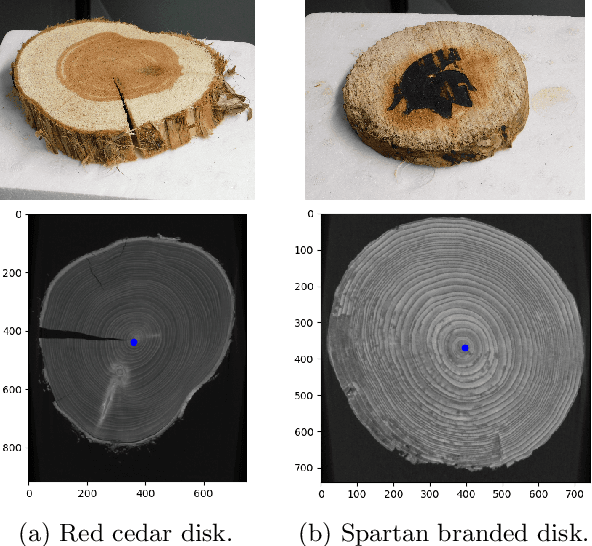
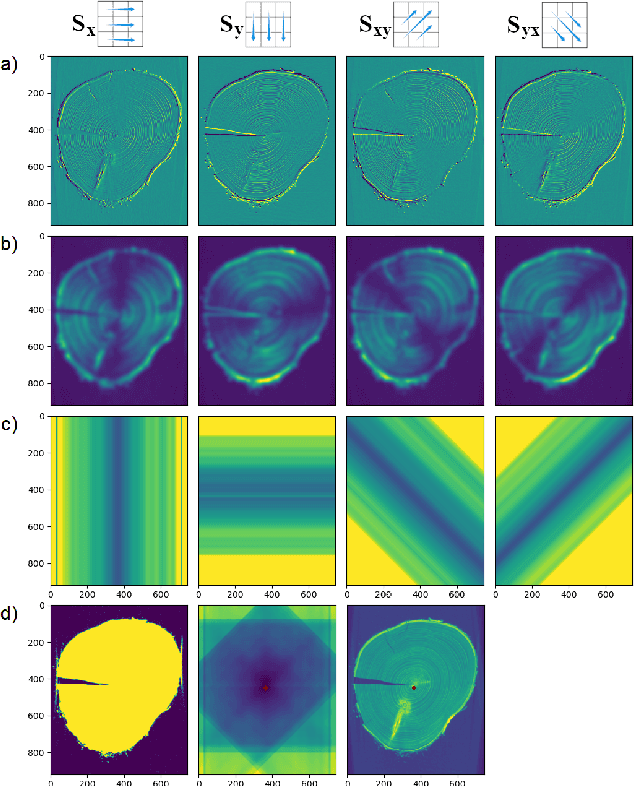
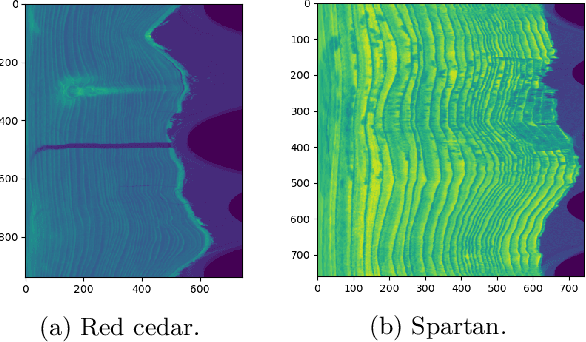
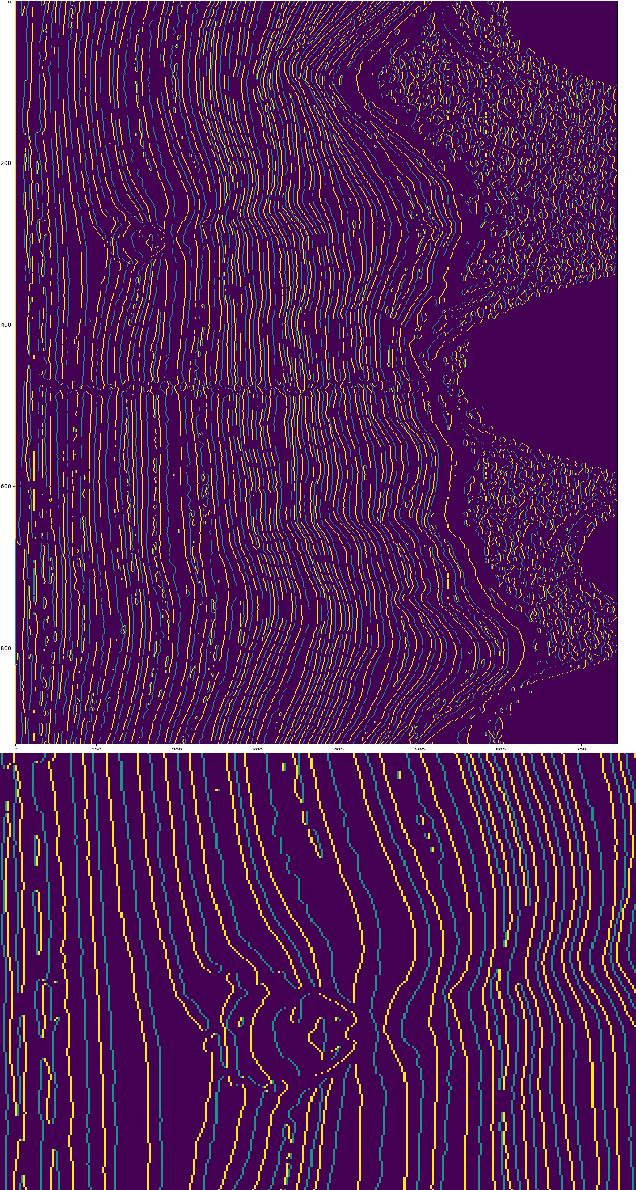
Tree ring widths are an important source of climatic and historical data, but measuring these widths typically requires extensive manual work. Computer vision techniques provide promising directions towards the automation of tree ring detection, but most automated methods still require a substantial amount of user interaction to obtain high accuracy. We perform analysis on 3D X-ray CT images of a cross-section of a tree trunk, known as a tree disk. We present novel automated methods for locating the pith (center) of a tree disk, and ring boundaries. Our methods use a combination of standard image processing techniques and tools from topological data analysis. We evaluate the efficacy of our method for two different CT scans by comparing its results to manually located rings and centers and show that it is better than current automatic methods in terms of correctly counting each ring and its location. Our methods have several parameters, which we optimize experimentally by minimizing edit distances to the manually obtained locations.