 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime Series Treatment Effects Analysis with Always-Missing Controls
Feb 18, 2025

Estimating treatment effects in time series data presents a significant challenge, especially when the control group is always unobservable. For example, in analyzing the effects of Christmas on retail sales, we lack direct observation of what would have occurred in late December without the Christmas impact. To address this, we try to recover the control group in the event period while accounting for confounders and temporal dependencies. Experimental results on the M5 Walmart retail sales data demonstrate robust estimation of the potential outcome of the control group as well as accurate predicted holiday effect. Furthermore, we provided theoretical guarantees for the estimated treatment effect, proving its consistency and asymptotic normality. The proposed methodology is applicable not only to this always-missing control scenario but also in other conventional time series causal inference settings.
UniCal: Unified Neural Sensor Calibration
Sep 27, 2024



Self-driving vehicles (SDVs) require accurate calibration of LiDARs and cameras to fuse sensor data accurately for autonomy. Traditional calibration methods typically leverage fiducials captured in a controlled and structured scene and compute correspondences to optimize over. These approaches are costly and require substantial infrastructure and operations, making it challenging to scale for vehicle fleets. In this work, we propose UniCal, a unified framework for effortlessly calibrating SDVs equipped with multiple LiDARs and cameras. Our approach is built upon a differentiable scene representation capable of rendering multi-view geometrically and photometrically consistent sensor observations. We jointly learn the sensor calibration and the underlying scene representation through differentiable volume rendering, utilizing outdoor sensor data without the need for specific calibration fiducials. This "drive-and-calibrate" approach significantly reduces costs and operational overhead compared to existing calibration systems, enabling efficient calibration for large SDV fleets at scale. To ensure geometric consistency across observations from different sensors, we introduce a novel surface alignment loss that combines feature-based registration with neural rendering. Comprehensive evaluations on multiple datasets demonstrate that UniCal outperforms or matches the accuracy of existing calibration approaches while being more efficient, demonstrating the value of UniCal for scalable calibration.
Recent Advances, Applications, and Open Challenges in Machine Learning for Health: Reflections from Research Roundtables at ML4H 2023 Symposium
Mar 03, 2024The third ML4H symposium was held in person on December 10, 2023, in New Orleans, Louisiana, USA. The symposium included research roundtable sessions to foster discussions between participants and senior researchers on timely and relevant topics for the \ac{ML4H} community. Encouraged by the successful virtual roundtables in the previous year, we organized eleven in-person roundtables and four virtual roundtables at ML4H 2022. The organization of the research roundtables at the conference involved 17 Senior Chairs and 19 Junior Chairs across 11 tables. Each roundtable session included invited senior chairs (with substantial experience in the field), junior chairs (responsible for facilitating the discussion), and attendees from diverse backgrounds with interest in the session's topic. Herein we detail the organization process and compile takeaways from these roundtable discussions, including recent advances, applications, and open challenges for each topic. We conclude with a summary and lessons learned across all roundtables. This document serves as a comprehensive review paper, summarizing the recent advancements in machine learning for healthcare as contributed by foremost researchers in the field.
A Latent Source Model for Patch-Based Image Segmentation
Oct 06, 2015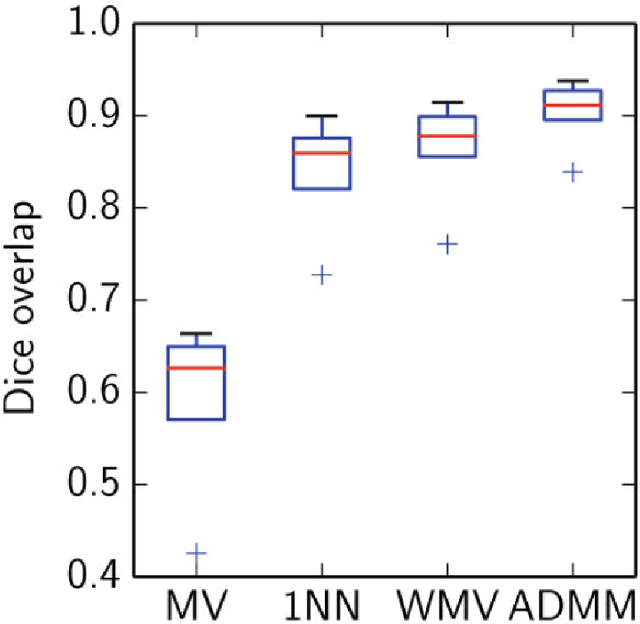
Despite the popularity and empirical success of patch-based nearest-neighbor and weighted majority voting approaches to medical image segmentation, there has been no theoretical development on when, why, and how well these nonparametric methods work. We bridge this gap by providing a theoretical performance guarantee for nearest-neighbor and weighted majority voting segmentation under a new probabilistic model for patch-based image segmentation. Our analysis relies on a new local property for how similar nearby patches are, and fuses existing lines of work on modeling natural imagery patches and theory for nonparametric classification. We use the model to derive a new patch-based segmentation algorithm that iterates between inferring local label patches and merging these local segmentations to produce a globally consistent image segmentation. Many existing patch-based algorithms arise as special cases of the new algorithm.