 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniCal: Unified Neural Sensor Calibration
Sep 27, 2024



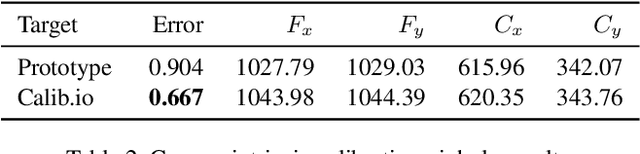
Self-driving vehicles (SDVs) require accurate calibration of LiDARs and cameras to fuse sensor data accurately for autonomy. Traditional calibration methods typically leverage fiducials captured in a controlled and structured scene and compute correspondences to optimize over. These approaches are costly and require substantial infrastructure and operations, making it challenging to scale for vehicle fleets. In this work, we propose UniCal, a unified framework for effortlessly calibrating SDVs equipped with multiple LiDARs and cameras. Our approach is built upon a differentiable scene representation capable of rendering multi-view geometrically and photometrically consistent sensor observations. We jointly learn the sensor calibration and the underlying scene representation through differentiable volume rendering, utilizing outdoor sensor data without the need for specific calibration fiducials. This "drive-and-calibrate" approach significantly reduces costs and operational overhead compared to existing calibration systems, enabling efficient calibration for large SDV fleets at scale. To ensure geometric consistency across observations from different sensors, we introduce a novel surface alignment loss that combines feature-based registration with neural rendering. Comprehensive evaluations on multiple datasets demonstrate that UniCal outperforms or matches the accuracy of existing calibration approaches while being more efficient, demonstrating the value of UniCal for scalable calibration.
MUSES: The Multi-Sensor Semantic Perception Dataset for Driving under Uncertainty
Jan 23, 2024



Achieving level-5 driving automation in autonomous vehicles necessitates a robust semantic visual perception system capable of parsing data from different sensors across diverse conditions. However, existing semantic perception datasets often lack important non-camera modalities typically used in autonomous vehicles, or they do not exploit such modalities to aid and improve semantic annotations in challenging conditions. To address this, we introduce MUSES, the MUlti-SEnsor Semantic perception dataset for driving in adverse conditions under increased uncertainty. MUSES includes synchronized multimodal recordings with 2D panoptic annotations for 2500 images captured under diverse weather and illumination. The dataset integrates a frame camera, a lidar, a radar, an event camera, and an IMU/GNSS sensor. Our new two-stage panoptic annotation protocol captures both class-level and instance-level uncertainty in the ground truth and enables the novel task of uncertainty-aware panoptic segmentation we introduce, along with standard semantic and panoptic segmentation. MUSES proves both effective for training and challenging for evaluating models under diverse visual conditions, and it opens new avenues for research in multimodal and uncertainty-aware dense semantic perception. Our dataset and benchmark will be made publicly available.
UncLe-SLAM: Uncertainty Learning for Dense Neural SLAM
Jun 19, 2023We present an uncertainty learning framework for dense neural simultaneous localization and mapping (SLAM). Estimating pixel-wise uncertainties for the depth input of dense SLAM methods allows to re-weigh the tracking and mapping losses towards image regions that contain more suitable information that is more reliable for SLAM. To this end, we propose an online framework for sensor uncertainty estimation that can be trained in a self-supervised manner from only 2D input data. We further discuss the advantages of the uncertainty learning for the case of multi-sensor input. Extensive analysis, experimentation, and ablations show that our proposed modeling paradigm improves both mapping and tracking accuracy and often performs better than alternatives that require ground truth depth or 3D. Our experiments show that we achieve a 38% and 27% lower absolute trajectory tracking error (ATE) on the 7-Scenes and TUM-RGBD datasets respectively. On the popular Replica dataset on two types of depth sensors we report an 11% F1-score improvement on RGBD SLAM compared to the recent state-of-the-art neural implicit approaches. Our source code will be made available.
Lasers to Events: Automatic Extrinsic Calibration of Lidars and Event Cameras
Jul 03, 2022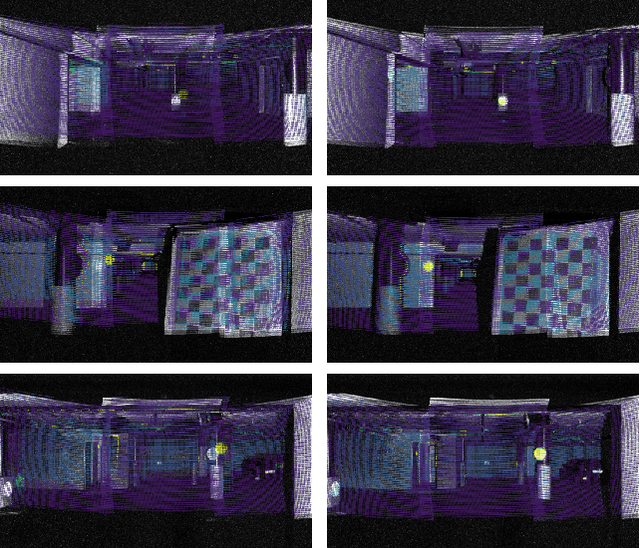


Despite significant academic and corporate efforts, autonomous driving under adverse visual conditions still proves challenging. As neuromorphic technology has matured, its application to robotics and autonomous vehicle systems has become an area of active research. Low-light and latency-demanding situations can benefit. To enable event cameras to operate alongside staple sensors like lidar in perception tasks, we propose a direct, temporally-decoupled calibration method between event cameras and lidars. The high dynamic range and low-light operation of event cameras are exploited to directly register lidar laser returns, allowing information-based correlation methods to optimize for the 6-DoF extrinsic calibration between the two sensors. This paper presents the first direct calibration method between event cameras and lidars, removing dependencies on frame-based camera intermediaries and/or highly-accurate hand measurements. Code will be made publicly available.