 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRadar Fields: Frequency-Space Neural Scene Representations for FMCW Radar
May 07, 2024Neural fields have been broadly investigated as scene representations for the reproduction and novel generation of diverse outdoor scenes, including those autonomous vehicles and robots must handle. While successful approaches for RGB and LiDAR data exist, neural reconstruction methods for radar as a sensing modality have been largely unexplored. Operating at millimeter wavelengths, radar sensors are robust to scattering in fog and rain, and, as such, offer a complementary modality to active and passive optical sensing techniques. Moreover, existing radar sensors are highly cost-effective and deployed broadly in robots and vehicles that operate outdoors. We introduce Radar Fields - a neural scene reconstruction method designed for active radar imagers. Our approach unites an explicit, physics-informed sensor model with an implicit neural geometry and reflectance model to directly synthesize raw radar measurements and extract scene occupancy. The proposed method does not rely on volume rendering. Instead, we learn fields in Fourier frequency space, supervised with raw radar data. We validate the effectiveness of the method across diverse outdoor scenarios, including urban scenes with dense vehicles and infrastructure, and in harsh weather scenarios, where mm-wavelength sensing is especially favorable.
MUSES: The Multi-Sensor Semantic Perception Dataset for Driving under Uncertainty
Jan 23, 2024



Achieving level-5 driving automation in autonomous vehicles necessitates a robust semantic visual perception system capable of parsing data from different sensors across diverse conditions. However, existing semantic perception datasets often lack important non-camera modalities typically used in autonomous vehicles, or they do not exploit such modalities to aid and improve semantic annotations in challenging conditions. To address this, we introduce MUSES, the MUlti-SEnsor Semantic perception dataset for driving in adverse conditions under increased uncertainty. MUSES includes synchronized multimodal recordings with 2D panoptic annotations for 2500 images captured under diverse weather and illumination. The dataset integrates a frame camera, a lidar, a radar, an event camera, and an IMU/GNSS sensor. Our new two-stage panoptic annotation protocol captures both class-level and instance-level uncertainty in the ground truth and enables the novel task of uncertainty-aware panoptic segmentation we introduce, along with standard semantic and panoptic segmentation. MUSES proves both effective for training and challenging for evaluating models under diverse visual conditions, and it opens new avenues for research in multimodal and uncertainty-aware dense semantic perception. Our dataset and benchmark will be made publicly available.
Contrastive Model Adaptation for Cross-Condition Robustness in Semantic Segmentation
Mar 09, 2023



Standard unsupervised domain adaptation methods adapt models from a source to a target domain using labeled source data and unlabeled target data jointly. In model adaptation, on the other hand, access to the labeled source data is prohibited, i.e., only the source-trained model and unlabeled target data are available. We investigate normal-to-adverse condition model adaptation for semantic segmentation, whereby image-level correspondences are available in the target domain. The target set consists of unlabeled pairs of adverse- and normal-condition street images taken at GPS-matched locations. Our method -- CMA -- leverages such image pairs to learn condition-invariant features via contrastive learning. In particular, CMA encourages features in the embedding space to be grouped according to their condition-invariant semantic content and not according to the condition under which respective inputs are captured. To obtain accurate cross-domain semantic correspondences, we warp the normal image to the viewpoint of the adverse image and leverage warp-confidence scores to create robust, aggregated features. With this approach, we achieve state-of-the-art semantic segmentation performance for model adaptation on several normal-to-adverse adaptation benchmarks, such as ACDC and Dark Zurich. We also evaluate CMA on a newly procured adverse-condition generalization benchmark and report favorable results compared to standard unsupervised domain adaptation methods, despite the comparative handicap of CMA due to source data inaccessibility. Code is available at https://github.com/brdav/cma.
Lasers to Events: Automatic Extrinsic Calibration of Lidars and Event Cameras
Jul 03, 2022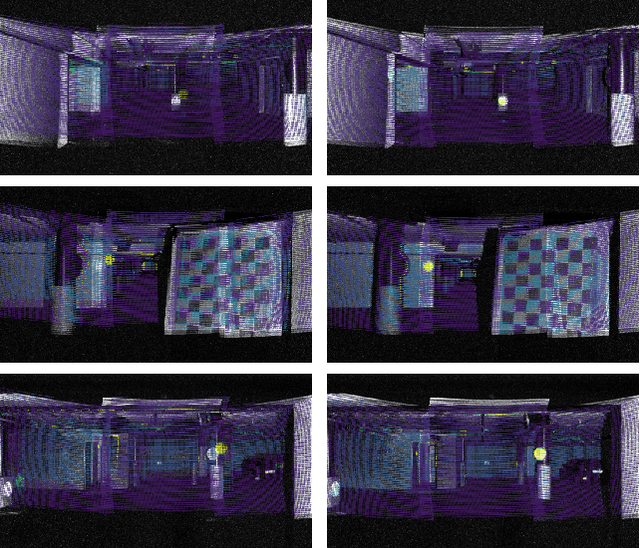


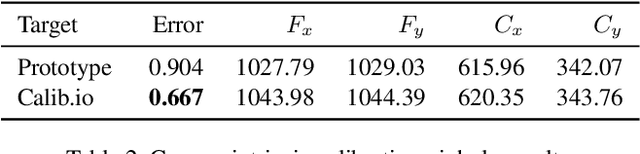
Despite significant academic and corporate efforts, autonomous driving under adverse visual conditions still proves challenging. As neuromorphic technology has matured, its application to robotics and autonomous vehicle systems has become an area of active research. Low-light and latency-demanding situations can benefit. To enable event cameras to operate alongside staple sensors like lidar in perception tasks, we propose a direct, temporally-decoupled calibration method between event cameras and lidars. The high dynamic range and low-light operation of event cameras are exploited to directly register lidar laser returns, allowing information-based correlation methods to optimize for the 6-DoF extrinsic calibration between the two sensors. This paper presents the first direct calibration method between event cameras and lidars, removing dependencies on frame-based camera intermediaries and/or highly-accurate hand measurements. Code will be made publicly available.