 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge-Area Fabrication-aware Computational Diffractive Optics
May 28, 2025Differentiable optics, as an emerging paradigm that jointly optimizes optics and (optional) image processing algorithms, has made innovative optical designs possible across a broad range of applications. Many of these systems utilize diffractive optical components (DOEs) for holography, PSF engineering, or wavefront shaping. Existing approaches have, however, mostly remained limited to laboratory prototypes, owing to a large quality gap between simulation and manufactured devices. We aim at lifting the fundamental technical barriers to the practical use of learned diffractive optical systems. To this end, we propose a fabrication-aware design pipeline for diffractive optics fabricated by direct-write grayscale lithography followed by nano-imprinting replication, which is directly suited for inexpensive mass production of large area designs. We propose a super-resolved neural lithography model that can accurately predict the 3D geometry generated by the fabrication process. This model can be seamlessly integrated into existing differentiable optics frameworks, enabling fabrication-aware, end-to-end optimization of computational optical systems. To tackle the computational challenges, we also devise tensor-parallel compute framework centered on distributing large-scale FFT computation across many GPUs. As such, we demonstrate large scale diffractive optics designs up to 32.16 mm $\times$ 21.44 mm, simulated on grids of up to 128,640 by 85,760 feature points. We find adequate agreement between simulation and fabricated prototypes for applications such as holography and PSF engineering. We also achieve high image quality from an imaging system comprised only of a single DOE, with images processed only by a Wiener filter utilizing the simulation PSF. We believe our findings lift the fabrication limitations for real-world applications of diffractive optics and differentiable optical design.
Radar Fields: Frequency-Space Neural Scene Representations for FMCW Radar
May 07, 2024Neural fields have been broadly investigated as scene representations for the reproduction and novel generation of diverse outdoor scenes, including those autonomous vehicles and robots must handle. While successful approaches for RGB and LiDAR data exist, neural reconstruction methods for radar as a sensing modality have been largely unexplored. Operating at millimeter wavelengths, radar sensors are robust to scattering in fog and rain, and, as such, offer a complementary modality to active and passive optical sensing techniques. Moreover, existing radar sensors are highly cost-effective and deployed broadly in robots and vehicles that operate outdoors. We introduce Radar Fields - a neural scene reconstruction method designed for active radar imagers. Our approach unites an explicit, physics-informed sensor model with an implicit neural geometry and reflectance model to directly synthesize raw radar measurements and extract scene occupancy. The proposed method does not rely on volume rendering. Instead, we learn fields in Fourier frequency space, supervised with raw radar data. We validate the effectiveness of the method across diverse outdoor scenarios, including urban scenes with dense vehicles and infrastructure, and in harsh weather scenarios, where mm-wavelength sensing is especially favorable.
Thin On-Sensor Nanophotonic Array Cameras
Aug 05, 2023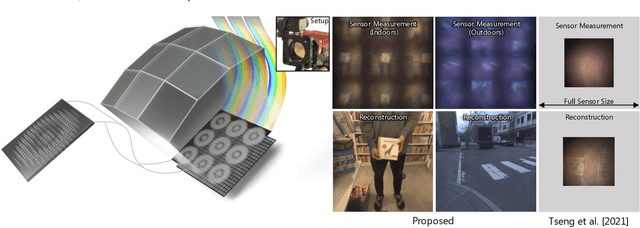
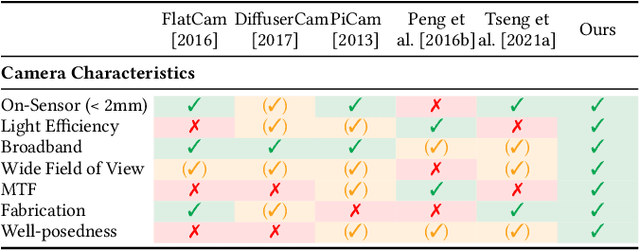
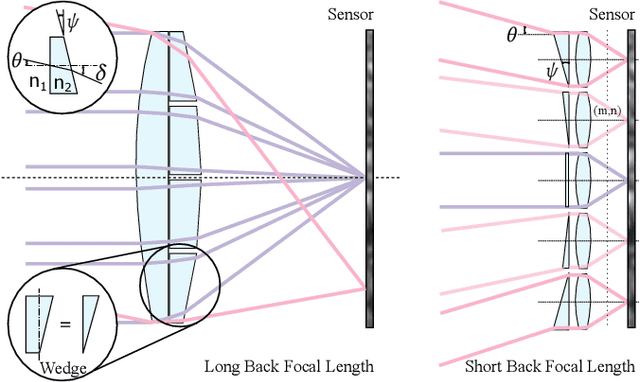
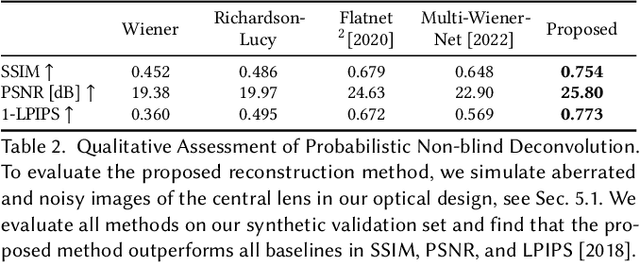
Today's commodity camera systems rely on compound optics to map light originating from the scene to positions on the sensor where it gets recorded as an image. To record images without optical aberrations, i.e., deviations from Gauss' linear model of optics, typical lens systems introduce increasingly complex stacks of optical elements which are responsible for the height of existing commodity cameras. In this work, we investigate \emph{flat nanophotonic computational cameras} as an alternative that employs an array of skewed lenslets and a learned reconstruction approach. The optical array is embedded on a metasurface that, at 700~nm height, is flat and sits on the sensor cover glass at 2.5~mm focal distance from the sensor. To tackle the highly chromatic response of a metasurface and design the array over the entire sensor, we propose a differentiable optimization method that continuously samples over the visible spectrum and factorizes the optical modulation for different incident fields into individual lenses. We reconstruct a megapixel image from our flat imager with a \emph{learned probabilistic reconstruction} method that employs a generative diffusion model to sample an implicit prior. To tackle \emph{scene-dependent aberrations in broadband}, we propose a method for acquiring paired captured training data in varying illumination conditions. We assess the proposed flat camera design in simulation and with an experimental prototype, validating that the method is capable of recovering images from diverse scenes in broadband with a single nanophotonic layer.