 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSame accuracy, twice as fast: continuous training surpasses retraining from scratch
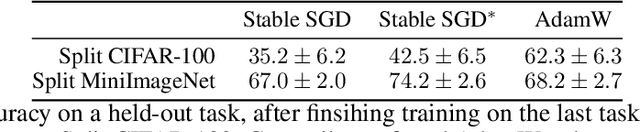
Feb 28, 2025Continual learning aims to enable models to adapt to new datasets without losing performance on previously learned data, often assuming that prior data is no longer available. However, in many practical scenarios, both old and new data are accessible. In such cases, good performance on both datasets is typically achieved by abandoning the model trained on the previous data and re-training a new model from scratch on both datasets. This training from scratch is computationally expensive. In contrast, methods that leverage the previously trained model and old data are worthy of investigation, as they could significantly reduce computational costs. Our evaluation framework quantifies the computational savings of such methods while maintaining or exceeding the performance of training from scratch. We identify key optimization aspects -- initialization, regularization, data selection, and hyper-parameters -- that can each contribute to reducing computational costs. For each aspect, we propose effective first-step methods that already yield substantial computational savings. By combining these methods, we achieve up to 2.7x reductions in computation time across various computer vision tasks, highlighting the potential for further advancements in this area.
Continual Learning: Applications and the Road Forward
Nov 21, 2023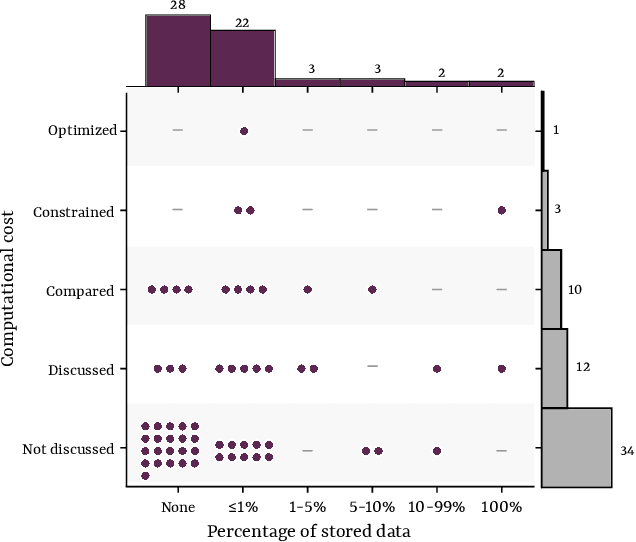
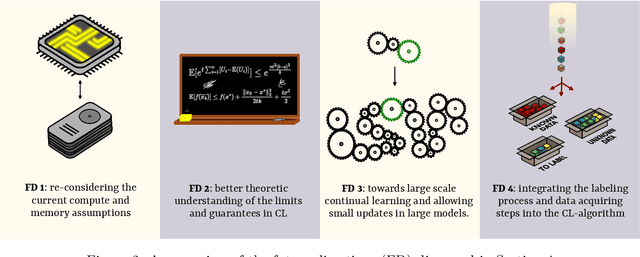
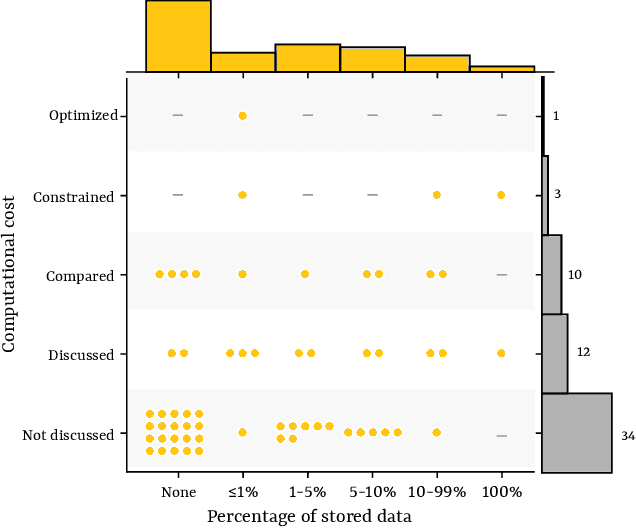
Continual learning is a sub-field of machine learning, which aims to allow machine learning models to continuously learn on new data, by accumulating knowledge without forgetting what was learned in the past. In this work, we take a step back, and ask: "Why should one care about continual learning in the first place?". We set the stage by surveying recent continual learning papers published at three major machine learning conferences, and show that memory-constrained settings dominate the field. Then, we discuss five open problems in machine learning, and even though they seem unrelated to continual learning at first sight, we show that continual learning will inevitably be part of their solution. These problems are model-editing, personalization, on-device learning, faster (re-)training and reinforcement learning. Finally, by comparing the desiderata from these unsolved problems and the current assumptions in continual learning, we highlight and discuss four future directions for continual learning research. We hope that this work offers an interesting perspective on the future of continual learning, while displaying its potential value and the paths we have to pursue in order to make it successful. This work is the result of the many discussions the authors had at the Dagstuhl seminar on Deep Continual Learning, in March 2023.
Knowledge Accumulation in Continually Learned Representations and the Issue of Feature Forgetting
Apr 03, 2023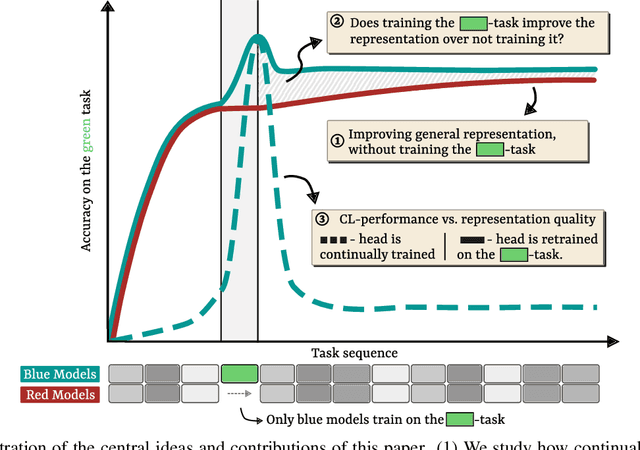
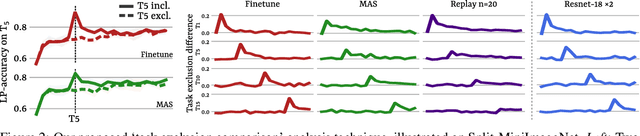
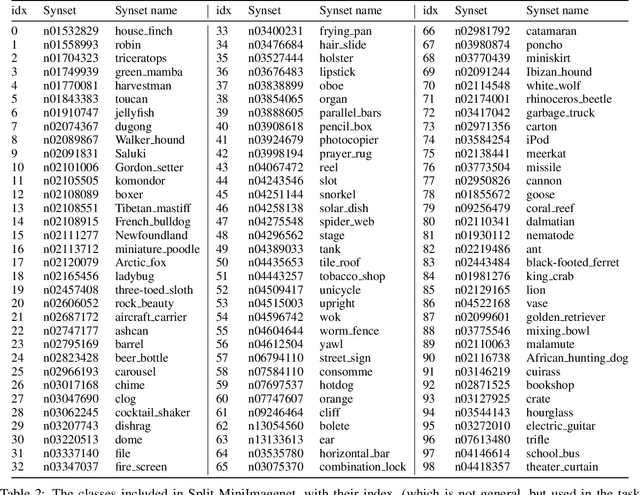
By default, neural networks learn on all training data at once. When such a model is trained on sequential chunks of new data, it tends to catastrophically forget how to handle old data. In this work we investigate how continual learners learn and forget representations. We observe two phenomena: knowledge accumulation, i.e. the improvement of a representation over time, and feature forgetting, i.e. the loss of task-specific representations. To better understand both phenomena, we introduce a new analysis technique called task exclusion comparison. If a model has seen a task and it has not forgotten all the task-specific features, then its representation for that task should be better than that of a model that was trained on similar tasks, but not that exact one. Our image classification experiments show that most task-specific features are quickly forgotten, in contrast to what has been suggested in the past. Further, we demonstrate how some continual learning methods, like replay, and ideas from representation learning affect a continually learned representation. We conclude by observing that representation quality is tightly correlated with continual learning performance.
CLAD: A realistic Continual Learning benchmark for Autonomous Driving
Oct 07, 2022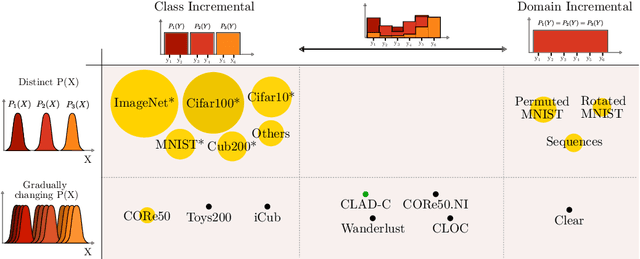
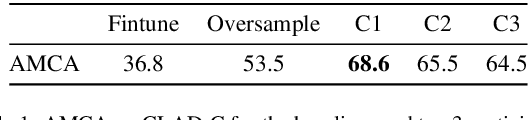
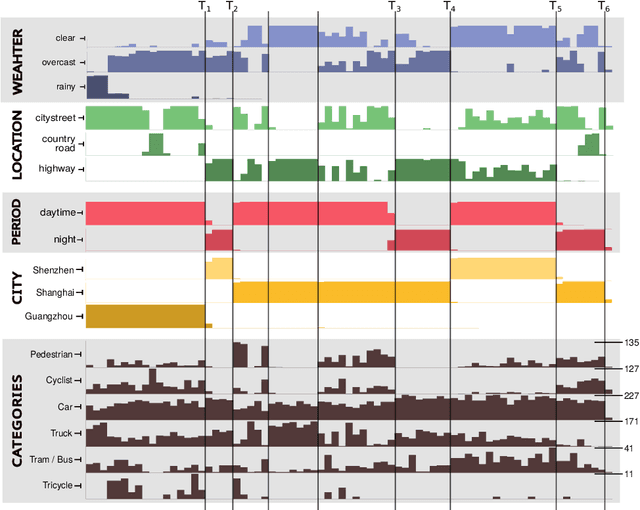
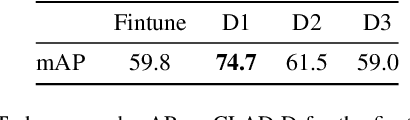
In this paper we describe the design and the ideas motivating a new Continual Learning benchmark for Autonomous Driving (CLAD), that focuses on the problems of object classification and object detection. The benchmark utilises SODA10M, a recently released large-scale dataset that concerns autonomous driving related problems. First, we review and discuss existing continual learning benchmarks, how they are related, and show that most are extreme cases of continual learning. To this end, we survey the benchmarks used in continual learning papers at three highly ranked computer vision conferences. Next, we introduce CLAD-C, an online classification benchmark realised through a chronological data stream that poses both class and domain incremental challenges; and CLAD-D, a domain incremental continual object detection benchmark. We examine the inherent difficulties and challenges posed by the benchmark, through a survey of the techniques and methods used by the top-3 participants in a CLAD-challenge workshop at ICCV 2021. We conclude with possible pathways to improve the current continual learning state of the art, and which directions we deem promising for future research.
Re-examining Distillation For Continual Object Detection
Apr 04, 2022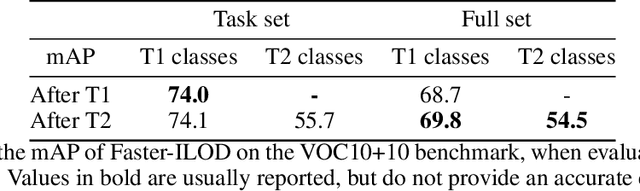
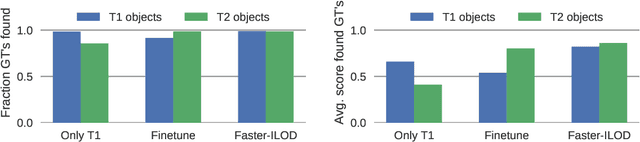


Training models continually to detect and classify objects, from new classes and new domains, remains an open problem. In this work, we conduct a thorough analysis of why and how object detection models forget catastrophically. We focus on distillation-based approaches in two-stage networks; the most-common strategy employed in contemporary continual object detection work.Distillation aims to transfer the knowledge of a model trained on previous tasks -- the teacher -- to a new model -- the student -- while it learns the new task. We show that this works well for the region proposal network, but that wrong, yet overly confident teacher predictions prevent student models from effective learning of the classification head. Our analysis provides a foundation that allows us to propose improvements for existing techniques by detecting incorrect teacher predictions, based on current ground-truth labels, and by employing an adaptive Huber loss as opposed to the mean squared error for the distillation loss in the classification heads. We evidence that our strategy works not only in a class incremental setting, but also in domain incremental settings, which constitute a realistic context, likely to be the setting of representative real-world problems.
Rehearsal revealed: The limits and merits of revisiting samples in continual learning
Apr 15, 2021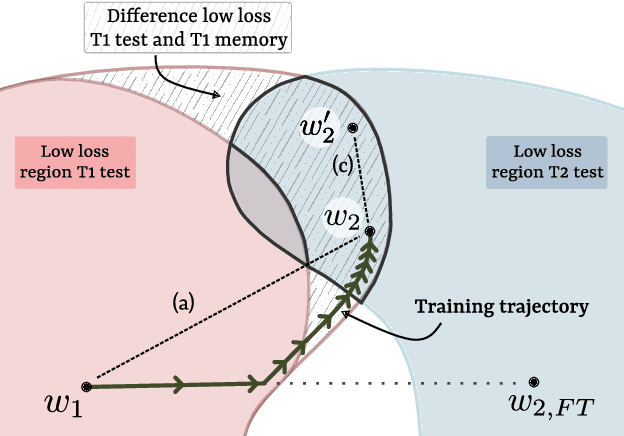
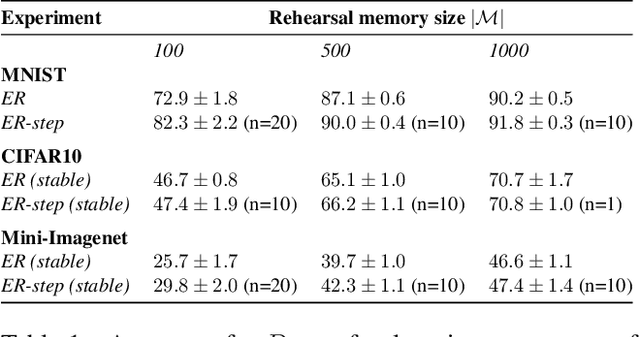
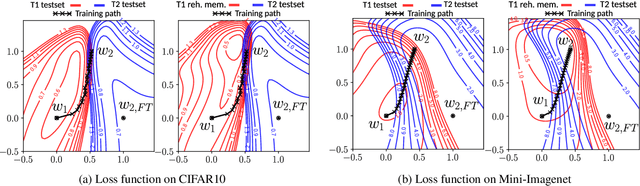
Learning from non-stationary data streams and overcoming catastrophic forgetting still poses a serious challenge for machine learning research. Rather than aiming to improve state-of-the-art, in this work we provide insight into the limits and merits of rehearsal, one of continual learning's most established methods. We hypothesize that models trained sequentially with rehearsal tend to stay in the same low-loss region after a task has finished, but are at risk of overfitting on its sample memory, hence harming generalization. We provide both conceptual and strong empirical evidence on three benchmarks for both behaviors, bringing novel insights into the dynamics of rehearsal and continual learning in general. Finally, we interpret important continual learning works in the light of our findings, allowing for a deeper understanding of their successes.